一种同轴激光雷达光路及激光雷达的制作方法
本申请涉及雷达领域,具体而言,涉及一种同轴激光雷达光路及激光雷达。
背景技术:
1、从自动驾驶到adas、无人机器人、智慧物流等工业场景,激光雷达都作为感知系统最核心的传感器提供丰富感知的能力。激光雷达最核心的原理是利用tof飞行时间做激光测距,通过激光的发射和接收完成飞行时间的高精度测量,最后解析出来探测距离和每个3d场景的激光点云。
2、由于激光雷达内部会反射杂散光,导致激光雷达在测量时存在盲区,影响激光雷达的测量精度。如何克服杂散光所带来的测量盲区,成为了本领域技术人员亟待解决的技术问题。
技术实现思路
1、本申请的目的在于提供一种同轴激光雷达光路及激光雷达,以至少部分改善上述问题。
2、为了实现上述目的,本申请实施例采用的技术方案如下:
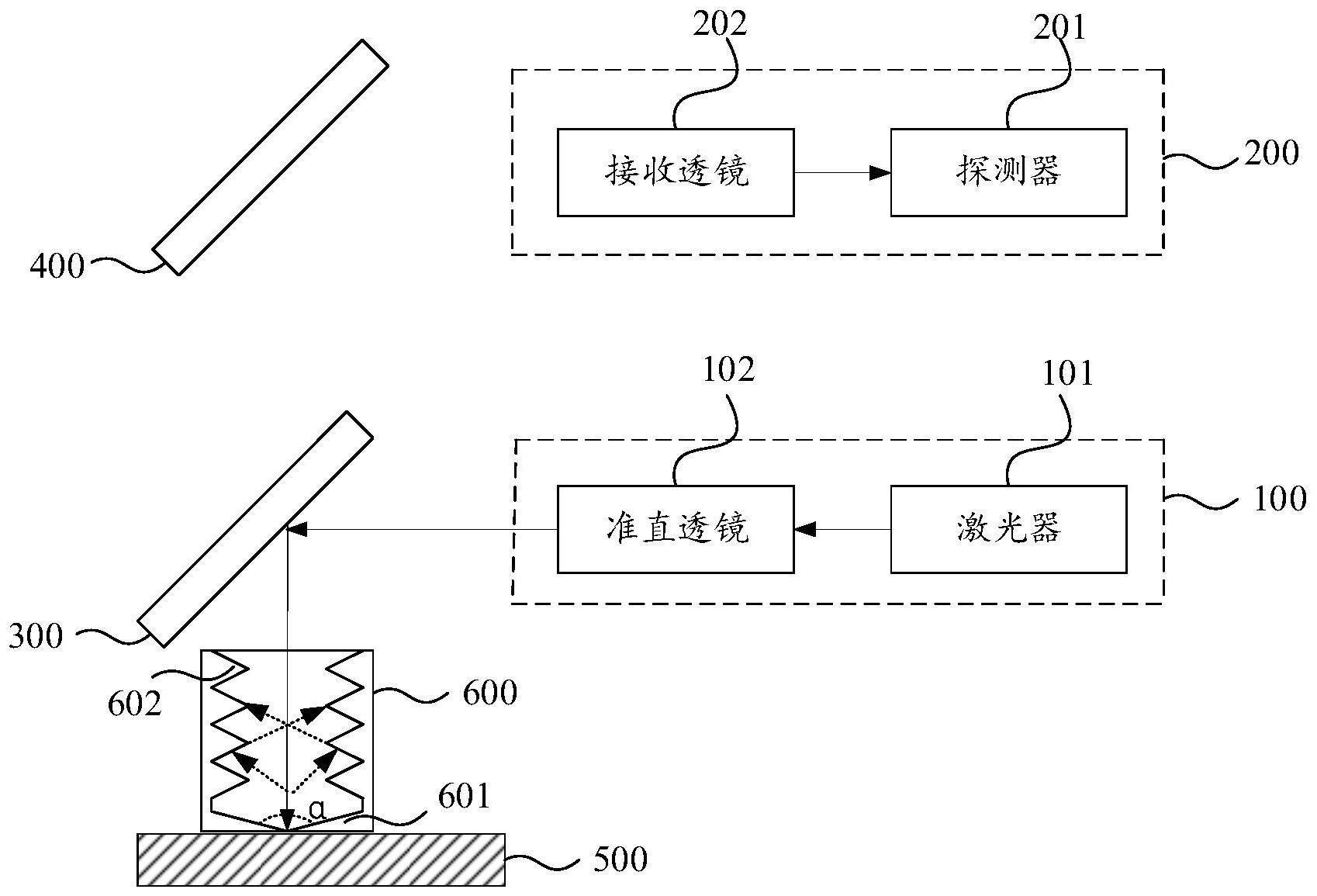
3、第一方面,本申请实施例提供一种同轴激光雷达光路,所述同轴激光雷达光路包括沿光路同轴设置的发射光路、带孔反射镜、第二反射镜以及接收光路,所述同轴激光雷达光路还包括消光筒,所述消光筒设置在所述带孔反射镜背部的结构面上。
4、可选地,所述消光筒的中心与所述带孔反射镜的孔在所述结构面的投影之间的距离小于第一预设距离值。
5、可选地,所述消光筒的底部为锥面,且所述消光筒的底部锥面角度不等于90°。
6、可选地,所述消光筒的底部锥面角度的取值范围为100-135°。
7、可选地,所述消光筒的内壁上设置预设圈数的消光螺纹。
8、可选地,所述消光螺纹的螺牙顶端为平面。
9、可选地,所述消光螺纹的螺牙顶端为锐角。
10、可选地,各圈消光螺纹的直径大于所述带孔反射镜背部的反射光斑尺寸。
11、可选地,相邻的所述消光螺纹之间的距离小于第二预设距离值,所述第二预设距离值与所述消光筒的直径正相关。
12、可选地,所述消光筒的深度大于第三预设距离值。
13、可选地,所述消光筒的内壁和/或底部均进行了消光处理。
14、可选地,所述消光处理包括喷砂处理、发黑处理以及涂墨中的任意一种或多种。
15、可选地,所述发射光路包括依次设置的激光器和准直透镜。
16、可选地,所述接收光路包括依次设置的接收透镜和探测器。
17、第二方面,本申请实施例提供一种激光雷达,包括上述的同轴激光雷达光路。
18、相对于现有技术,本申请实施例所提供的同轴激光雷达光路,包括沿光路同轴设置的发射光路、带孔反射镜、第二反射镜以及接收光路,同轴激光雷达光路还包括消光筒,消光筒设置在带孔反射镜背部的结构面上。消光筒用于对带孔反射镜的背部的反射光进行吸收;还用于改变带孔反射镜的背部的反射光的传播方向,避免带孔反射镜的背部的反射光直接进入接收光路,改善同轴激光雷达存在的发射光路杂光能量过强的问题,最终使通过小孔进入接收光路里的杂光强度明显减弱,使得接收光路能够区分由杂散反射光形成的干扰信号和由目标物体反射的目标回波信号,提升激光雷达的探测精度,减少探测盲区。
19、为使本申请的上述目的、特征和优点能更明显易懂,下文特举较佳实施例,并配合所附附图,作详细说明如下。
技术特征:
1.一种同轴激光雷达光路,其特征在于,所述同轴激光雷达光路包括沿光路同轴设置的发射光路、带孔反射镜、第二反射镜以及接收光路,所述同轴激光雷达光路还包括消光筒,所述消光筒设置在所述带孔反射镜背部的结构面上。
2.如权利要求1所述的同轴激光雷达光路,其特征在于,所述消光筒的中心与所述带孔反射镜的孔在所述结构面的投影之间的距离小于第一预设距离值。
3.如权利要求1所述的同轴激光雷达光路,其特征在于,所述消光筒的底部为锥面,且所述消光筒的底部锥面角度不等于90°。
4.如权利要求3所述的同轴激光雷达光路,其特征在于,所述消光筒的底部锥面角度的取值范围为100-135°。
5.如权利要求1所述的同轴激光雷达光路,其特征在于,所述消光筒的内壁上设置预设圈数的消光螺纹。
6.如权利要求5所述的同轴激光雷达光路,其特征在于,所述消光螺纹的螺牙顶端为平面。
7.如权利要求5所述的同轴激光雷达光路,其特征在于,所述消光螺纹的螺牙顶端为锐角。
8.如权利要求5所述的同轴激光雷达光路,其特征在于,各圈消光螺纹的直径大于所述带孔反射镜背部的反射光斑尺寸。
9.如权利要求5所述的同轴激光雷达光路,其特征在于,相邻的所述消光螺纹之间的距离小于第二预设距离值,所述第二预设距离值与所述消光筒的直径正相关。
10.如权利要求1所述的同轴激光雷达光路,其特征在于,所述消光筒的深度大于第三预设距离值。
11.如权利要求1所述的同轴激光雷达光路,其特征在于,所述消光筒的内壁和/或底部均进行了消光处理。
12.如权利要求11所述的同轴激光雷达光路,其特征在于,所述消光处理包括喷砂处理、发黑处理以及涂墨中的任意一种或多种。
13.如权利要求1所述的同轴激光雷达光路,其特征在于,所述发射光路包括依次设置的激光器和准直透镜。
14.如权利要求1所述的同轴激光雷达光路,其特征在于,所述接收光路包括依次设置的接收透镜和探测器。
15.一种激光雷达,其特征在于,包括权利要求1-14中任意一项所述的同轴激光雷达光路。
技术总结
本申请提出一种同轴激光雷达光路及激光雷达,包括沿光路同轴设置的发射光路、带孔反射镜、第二反射镜以及接收光路,同轴激光雷达光路还包括消光筒,消光筒设置在带孔反射镜背部的结构面上。消光筒用于对带孔反射镜的背部的反射光进行吸收;还用于改变带孔反射镜的背部的反射光的传播方向,避免带孔反射镜的背部的反射光直接进入接收光路,改善同轴激光雷达存在的发射光路杂光能量过强的问题,最终使通过小孔进入接收光路里的杂光强度明显减弱,使得接收光路能够区分由杂散反射光形成的干扰信号和由目标物体反射的目标回波信号,提升激光雷达的探测精度,减少探测盲区。
技术研发人员:崔泰毓,请求不公布姓名
受保护的技术使用者:广州导远电子科技有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!