一种改进的时间关联单光子三维成像方法
本发明属于激光雷达,具体涉及一种改进的时间关联单光子三维成像方法。
背景技术:
1、传统的三维成像激光雷达是常见的主动光学三维成像系统,已被广泛应用于工业、科学研究乃至国防领域。然而,随着高灵敏度光子探测技术和高精度电子学计时技术日趋成熟,以时间相关单光子计数三维成像技术为代表的激光雷达技术已逐渐成为远距离成像、非视域成像领域的发展趋势。
2、传统的单光子三维成像算法,如泊松噪声假设下的最大似然法,通常在单峰假设的前提下,对雷达波形进行对数匹配滤波后去寻找每个像素的经滤波数据的最大值。此外,altmann等人提出了一种贝叶斯方法,shin等人、halimi等人和rapp等人提出了三种不同的最优化方案,li等人提出了一种使用三维反卷积算法来实现8.2km的超分辨率成像方法。该方法能够实现最远达200km的单光子三维成像。
3、以上这些方法有一个共同的特征,那就是它们需要对深度进行粗略估计,以获得一副深度图来作为算法的输入。
4、因此,目前需要探索一种能够对深度进行稳定而精确的估计的算法,以提升时间相关单光子计数三维成像技术实际应用能力。
技术实现思路
1、本发明提供了一种改进的时间关联单光子三维成像方法,包括如下步骤:
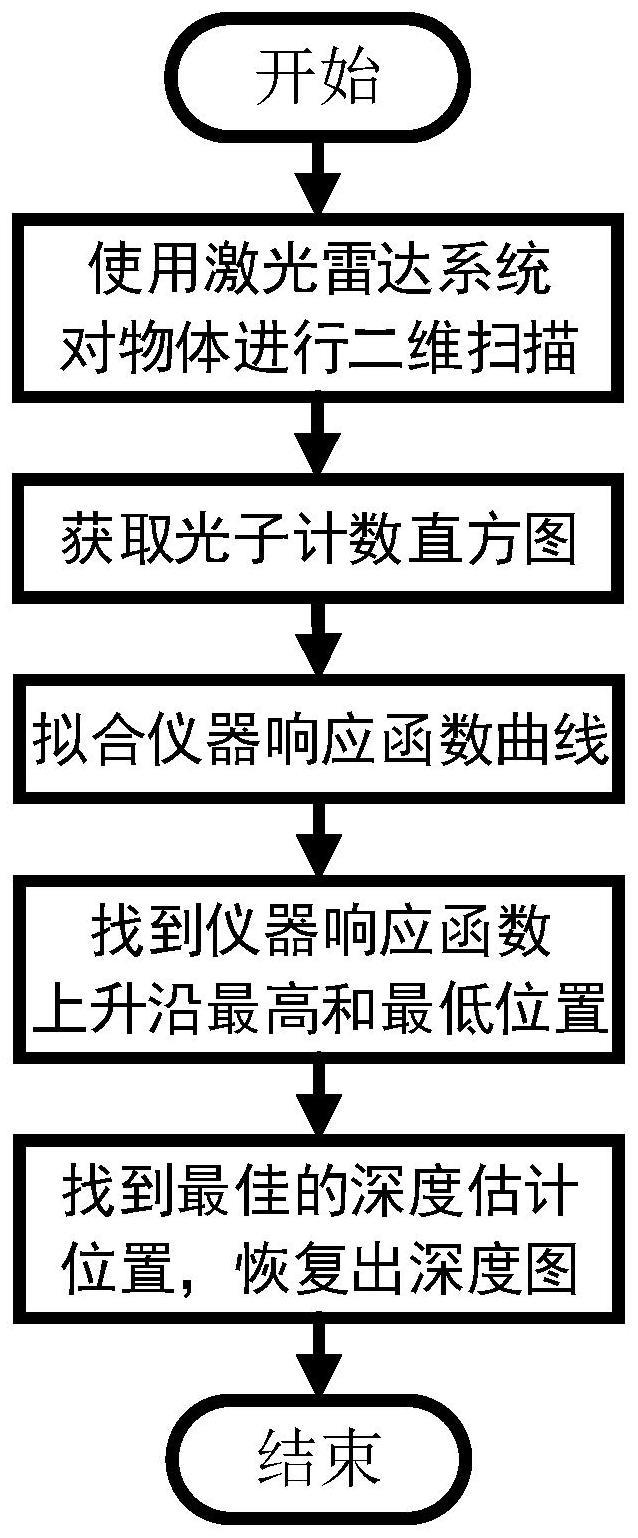
2、步骤1,使用时间相关单光子计数激光雷达系统对待测物体在x-y两维平面内进行扫描,获取扫描平面内每个像素的光子计数的直方图;
3、步骤2,根据获取的光子计数直方图拟合出仪器响应函数的曲线,由于该仪器响应函数模型是一个单峰函数,因此只具有一个上升沿。
4、步骤3,根据拟合出仪器响应函数的曲线,计算出每个像素的最佳深度估计位置,并据此计算每个像素的以距离为单位的深度,恢复出深度图。
5、进一步的,步骤1中所述时间相关单光子计数(time-correlated single photoncounting)激光雷达系统,采用门控时间相关单光子计数方法获取光子计数直方图。这里门控指在整个同步信号周期内选取一段时间作为门的位置,并确保回波光子信号位于门内,该方法通过设置合理的门宽和选择门合适的起始与结束位置能够有效地滤除噪声光子以及虚警。
6、所述激光雷达系统采用电磁式二维正交扫描振镜进行光栅式扫描,扫描振镜分为水平镜片和竖直镜片,分别控制水平和竖直扫描方向。当信号采集卡输出固定电压时,水平和竖直镜片维持在一个固定位置。采用信号采集卡编写电压序列vx和vy,设置每个像素的扫描时间tx,y,实现激光雷达的光栅扫描。
7、时间相关单光子计数方法基于多个激光脉冲同步周期内光子事件的累积,能够恢复出回波光子信号。根据同步信号和对回波光子的探测,就可以得到该像素点的光子计数直方图。即首先将激光雷达发射的激光脉冲标记为同步信号,并记录下每个同步信号周期内第一个被探测到的回波光子信号与同步信号之间的时间差。根据这一时间差,每次光子事件都会被归类进不同的直方图时间箱(该直方图的横轴是离散化的时间,通常将其称为时间戳(bin)一般每个bin的时间间隔是ps量级的;而直方图的纵轴就代表这个bin内的光子计数)中,经历多个周期的光子事件累积,最终得到一份完整的光子计数直方图数据。
8、进一步的,步骤2中拟合所用函数模型为一个两段的广义高斯函数,仪器响应函数曲线具体表达式为:
9、
10、其中,t代表时间,q={α,tp,σl,σr,b},α是幅度系数,tp是峰值对应的时间,σl是指当t<tp时函数的宽度系数,σr是指当t≥tp时函数的宽度系数,b代表背景噪声。参数集q可以通过最小二乘法进行拟合,函数f(t;q)能够被参数集q所唯一确定。
11、采用fi(t;qi)表示对第i个像素拟合后仪器响应函数曲线,具体表达式为:
12、
13、其中,qi为第i个像素的单个光子计数直方图ni所对应的拟合参数,
14、qi={αi,tpi,σli,σri,bi}。
15、进一步的,步骤3中最佳深度估计位置的计算方法可具体表述为:
16、di(bin)=[fi-1(fi>λ×(αi+bi))]left
17、其中,下标i指的是第i个像素,di(bin)是以时间戳(bin)为单位对第i个像素的深度估计值,fi代表由最小二乘法拟合光子计数直方图得到的第i个像素仪器响应函数,则fi-1就代表fi的反函数,λ是上升沿的位置因子,λ的取值范围为(0,1],表示从上升沿的最底部到最高点,αi和bi是光子计数直方图的拟合参数。由于表达式fi-1(fi>λ×(αi+bi))得到的是一段时间戳(bin)的区间,采用[]left取该区间内左侧的第一个整数作为该像素点的最佳深度估计。
18、进一步的,λ的值取拟合曲线上升沿处的斜率最大值。首先,之所以根据上升沿而非下降沿或最高点进行深度估计,是因为步骤2中所述仪器响应函数拟合模型的上升沿要比下降更为陡峭。在数值上表现为,σl<<σr,两者通常相差50倍以上。而如果一个脉冲的边沿越平缓,脉冲越宽,其对应的时间上的不确定度就越大,精度就越低;反之,一个脉冲的边沿越陡峭,脉冲越窄,其对应的时间上的不确定度就越小,精度就越高。因此为了确定最合适的上升沿位置因子,取令拟合曲线上升沿处的斜率达到最大值的λ,此时该λ对应的位置在时间上拥有最小的不确定度。该λ在数值上约等于0.6。随后通过实验验证,发现最大斜率处的λ与λ取0.5时,性能差距不大,所得到的深度估计数值的稳定性均大于λ取其他值的情况。并对λ取0.5时仪器响应函数的斜率进行计算,发现该斜率达到了最大值的97%。因此,为方便起见,在后续的实验中取λ=0.5;
19、由于该深度是根据信号上升沿的位置进行估计得到的,它与通过其他方法得到的深度估计存在一个固定的偏差。该偏差可以通过后期添加固定的系统误差来消除。进一步的,步骤3中对深度进行计算,采用飞行时间法,即由激光器发出信号光,遇物体后反射,通过计算光线发射和反射被接收的时间差,换算被拍摄物体的距离,以产生深度信息。具体可以表述为:
20、
21、其中,di(m)是以距离(m)为单位的对第i个像素的深度估计值,di(bin)是以时间戳(bin)为单位对第i个像素的深度估计值;r是时间相关单光子计数的时间分辨率,即每个离散化的时间戳(bin)对应的连续时间的长度,通常为ps量级;c是光速;分母中的2代表飞行距离包括来回两段路程。
技术特征:
1.一种改进的时间关联单光子三维成像方法,其特征在于,包括如下步骤:
2.根据权利要求1所述一种改进的时间关联单光子三维成像方法,其特征在于,步骤1中所述时间相关单光子计数激光雷达系统,采用门控时间相关单光子计数方法获取光子计数直方图。
3.根据权利要求1所述一种改进的时间关联单光子三维成像方法,其特征在于,
4.根据权利要求1所述一种改进的时间关联单光子三维成像方法,其特征在于,仪器响应函数曲线具体表达式为:
5.根据权利要求1所述一种改进的时间关联单光子三维成像方法,其特征在于,
6.根据权利要求5所述一种改进的时间关联单光子三维成像方法,其特征在于,
7.根据权利要求5所述一种改进的时间关联单光子三维成像方法,其特征在于,λ的值取0.5。
8.根据权利要求5所述一种改进的时间关联单光子三维成像方法,其特征在于,对深度进行计算,采用飞行时间法,即由激光器发出信号光,遇物体后反射,通过计算光线发射和反射被接收的时间差,换算被拍摄物体的距离,以产生深度信息;具体可以表述为:
技术总结
本发明属于激光雷达技术领域,具体提出了一种改进的时间关联单光子三维成像方法。本发明方法相较于传统的单光子三维成像方法,在深度估计方面同时使用上升沿估计方法,从而使成像结果表现出更强的稳定性和鲁棒性,主要包括以下步骤:步骤1,使用时间相关单光子计数激光雷达系统对待测物体在X‑Y两维平面内进行扫描,获取扫描平面内每个像素的光子计数的直方图;步骤2,根据获取的光子计数直方图拟合出仪器响应函数的曲线;步骤3,根据拟合出仪器响应函数的曲线,计算出每个像素的最佳深度估计位置,并据此计算每个像素的以距离为单位的深度,恢复出深度图。
技术研发人员:丁鼎,陆铮,王琴,李剑
受保护的技术使用者:南京邮电大学
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!