抗干扰柔性触觉力感知电容传感器及其制备方法与流程
本发明涉及柔性压力传感器,尤其涉及一种抗干扰柔性触觉力感知电容传感器及其制备方法。
背景技术:
1、随着科技快速发展和工作环境更加趋于复杂化和多样化,人们对电子器件在便携性、柔韧性、可穿戴性等方面要求越来越高。柔性力感知传感器作为一种新型的电子器件,它在人机交互、医疗健康、机器人触觉等应用领域具有比传统刚性传感器更大的优势。柔性电容式力感知传感器由于功耗低,温度稳定性好,信号漂移小且易检测,响应重复性高等优点受到广大科技开发者青睐。
2、然而,由于电容器本身结构和临近效应,电容式传感器易受到周围静止或运动物体存在以及外部电磁场的干扰,从而造成信号失真等诸多问题。尽管已有大量研究指出这种干扰的影响,但现有的柔性电容传感器仍缺乏在移动导体、电机或其它时变电场源附近操作所需的电磁屏蔽,限制了柔性电容传感器仅在实验环境中使用。传统的电容传感器常用金属网或金属膜作为外壳以屏蔽这些干扰,但金属外壳的存在会和电容器极板形成新的寄生电容,在刚性电容传感器中寄生电容数值是恒定不变的,可通过后期电路读数时补偿抵消寄生电容的影响,而柔性电容力感知传感器在外力作用下发生变形,寄生电容也会随之变化,较难通过后期补偿取消。更重要的是,由于柔性屏蔽层和寄生电容的存在,限制了柔性电容器在力感知的结构设计,具有抗干扰和三维力感知功能的柔性电容压力传感器研究较少。
技术实现思路
1、本发明为解决上述问题,提供一种抗干扰柔性触觉力感知电容传感器及其制备方法。
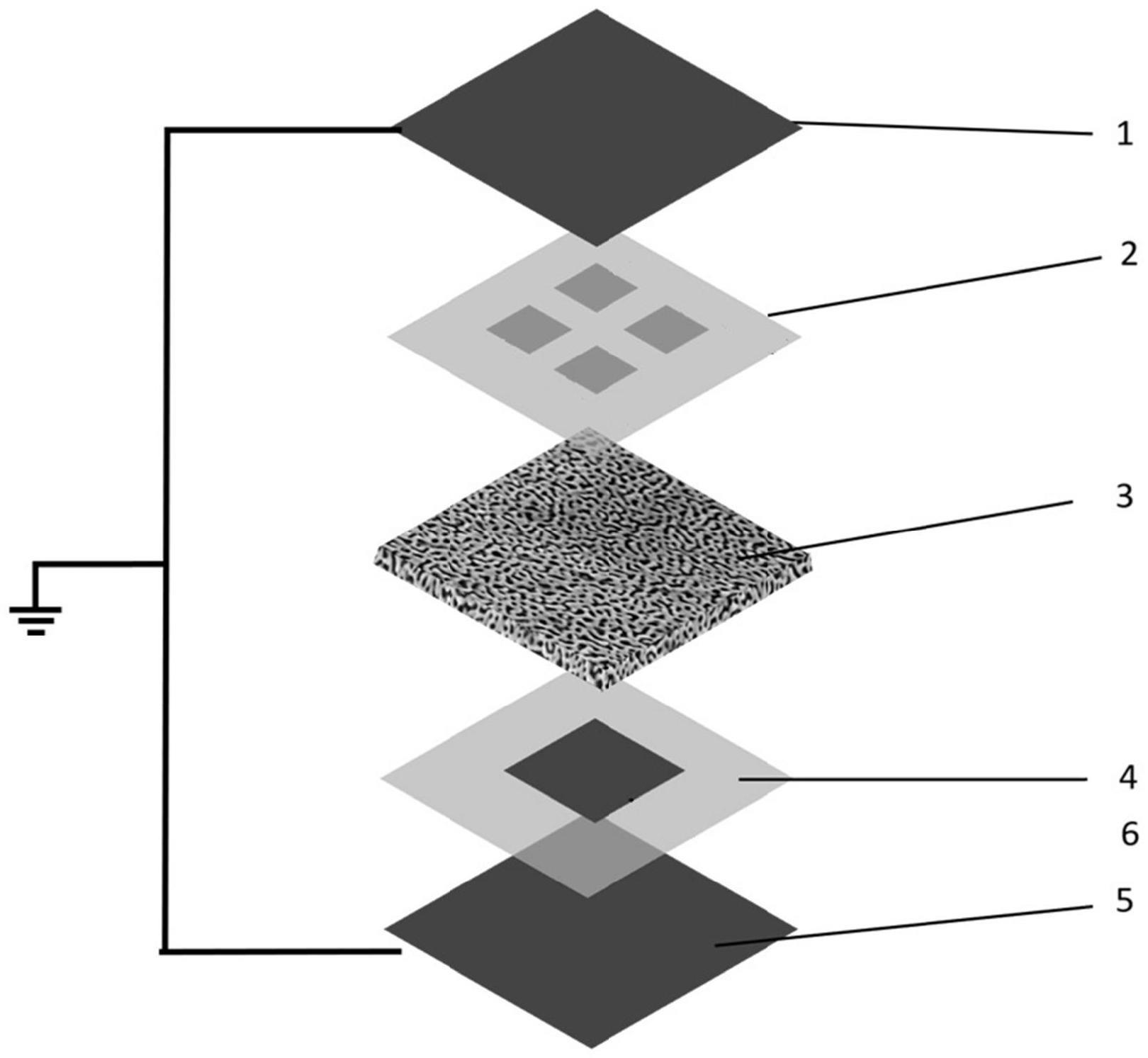
2、本发明第一目的在于提供一种抗干扰柔性触觉力感知电容传感器,所述传感器的结构从上至下依次为上导电屏蔽层、柔性四电极层、泡沫应变层、柔性单电极层、下导电屏蔽层,各层之间通过逐层旋涂柔性聚合物溶液粘贴固化为一体;
3、所述上导电屏蔽层与下导电屏蔽层结构相同,为液态金属-聚合物薄膜;所述柔性四电极层是在柔性聚合物薄膜表面以丝网印刷方式印有4个方形小电极的结构;所述泡沫应变层是将柔性聚合物溶液通过真空灌入糖块后去除糖颗粒得到的多孔结构;所述柔性单电极层是在柔性聚合物薄膜表面以丝网印刷方式印有1个方形电极的结构。
4、优选的,液态金属为共晶镓铟、镓铟锡或铋铟锡。
5、优选的,柔性聚合物为聚二甲基硅氧烷、ecoflex 00-30、苯乙烯-丁二烯-苯乙烯嵌段共聚物sbs、线性三嵌段共聚物sebs、聚氨基甲酸酯pu、热塑性聚氨酯弹性体橡胶tpu或聚偏氟乙烯pvdf。
6、优选的,4个方形小电极以2×2方式排布,每个方形小电极边长为2a;所述方形单电极的边长为4a;每个方形小电极与方形单电极重合区域为a×a的正方形。
7、优选的,泡沫变形层厚度t不小于100um。
8、本发明第二目的在于提供一种抗干扰柔性触觉力感知电容传感器的制备方法,包括如下步骤:
9、s1、将液态金属置于含有2-4%聚乙烯吡咯烷酮的正己醇中以200-400w的功率超声8-15min,制得液态金属分散液;在1500-2500r/min下离心8-15min,去上清,保留分散后的液态金属,加入柔性聚合物溶液,充分混合均匀,制得液态金属-聚合物墨水;所述聚乙烯吡咯烷酮与正己醇质量比大于2:1;
10、s2、将液态金属-聚合物墨水在平板上旋涂,在110-130℃下加热1.5-3h使其完全固化,剥离,制得液态金属-聚合物薄膜,即上导电屏蔽层和下导电屏蔽层;
11、s3、将步骤s1中液态金属-聚合物墨水在柔性聚合物薄膜表面以2×2方式丝网印刷4个方形小电极,制得柔性四电极层;
12、s4、制备薄糖块,将柔性聚合物溶液通过真空灌入方式填充至薄糖块中,在110-130℃下加热3.5-5h使其固化,置入水中去除糖颗粒,制得厚度为t的多孔应变层;
13、s5、将步骤s1中液态金属-聚合物墨水在柔性聚合物薄膜表面丝网印刷1个方形单电极,制得柔性单电极层;
14、s6、将上导电屏蔽层、柔性四电极层、泡沫应变层、柔性单电极层、下导电屏蔽层通过逐层旋涂柔性聚合物溶液依次粘贴固化为一体,制得柔性电容传感器;
15、s7、将步骤s6制得的柔性电容传感器置于水中超声激活,得到均匀导电的抗干扰柔性触觉力感知电容传感器。
16、优选的,液态金属分散液中的液态金属为100nm~5um的球形颗粒。
17、优选的,步骤s1中的pvp浓度为3%,pvp与正己醇质量比为4:1;所述超声的功率为300w,时间为10min。
18、优选的,步骤s2中的旋涂的转速为450-550r/min,时间为20-40s。
19、优选的,步骤s4中的薄糖块是通过3d打印方式打印高度为t的方形边框,并将白砂糖与去离子水以18-22:1的质量比均匀混合后填充至边框内,通过冷冻干燥方式制得的。
20、优选的,4个方形小电极空间上分别位于单电极的四角并与单电极部分重合;方形小电极边长为2a,单电极边长为4a,所述重合的区域为a×a的正方形。
21、优选的,步骤s7中的超声,采用超声波变幅杆,超声波功率不小于260w,超声波振幅不小于30um;所述柔性电容传感器置于超声波变幅杆下方0.5-1.5mm处,以0.3-1mm/s速度移动。
22、本发明有益效果:
23、(1)本发明采用多层结构,具有外电场屏蔽层,可解决现有柔性电容传感器易受外部电磁和周围运动或静止物体干扰导致测量准确性差的难题;
24、(2)本发明将所施加的外力转变为传感器中四对平行板电容器的间距与相对面积变化,通过四对平行板电容器电容值的计算解耦出整个电容传感器所受的力的方向和大小,具有精度高、响应速度快和三维触觉力感知的优势;
25、(3)本发明提供的可抗干扰的柔性触觉力感知电容传感器为全柔性,可作为电子皮肤应用于人体健康检测、人机交互、机器人触觉等领域。
技术特征:
1.抗干扰柔性触觉力感知电容传感器,其特征在于,所述传感器的结构从上至下依次为上导电屏蔽层、柔性四电极层、泡沫应变层、柔性单电极层、下导电屏蔽层,各层之间通过逐层旋涂柔性聚合物溶液粘贴固化为一体;
2.根据权利要求1所述的抗干扰柔性触觉力感知电容传感器,其特征在于:所述液态金属为共晶镓铟、镓铟锡或铋铟锡。
3.根据权利要求2所述的抗干扰柔性触觉力感知电容传感器,其特征在于:所述柔性聚合物为聚二甲基硅氧烷、ecoflex 00-30、苯乙烯-丁二烯-苯乙烯嵌段共聚物sbs、线性三嵌段共聚物sebs、聚氨基甲酸酯pu、热塑性聚氨酯弹性体橡胶tpu或聚偏氟乙烯pvdf。
4.根据权利要求1-3任意一项所述的抗干扰柔性触觉力感知电容传感器,其特征在于:所述4个方形小电极以2×2方式排布,每个方形小电极边长为2a;所述方形单电极的边长为4a;每个方形小电极与方形单电极重合区域为a×a的正方形。
5.根据权利要求4所述的抗干扰柔性触觉力感知电容传感器,其特征在于:所述泡沫变形层厚度t不小于100um。
6.权利要求1所述的抗干扰柔性触觉力感知电容传感器的制备方法,其特征在于,包括如下步骤:
7.根据权利要求6所述的抗干扰柔性触觉力感知电容传感器的制备方法,其特征在于:所述液态金属分散液中的液态金属为100nm~5um的球形颗粒。
8.根据权利要求7所述的抗干扰柔性触觉力感知电容传感器的制备方法,其特征在于:所述步骤s1中的pvp浓度为3%,pvp与正己醇质量比为4:1;所述超声的功率为300w,时间为10min。
9.根据权利要求8所述的抗干扰柔性触觉力感知电容传感器的制备方法,其特征在于:所述步骤s2中的旋涂的转速为450-550r/min,时间为20-40s。
10.根据权利要求9所述的抗干扰柔性触觉力感知电容传感器的制备方法,其特征在于:所述步骤s4中的薄糖块是通过3d打印方式打印高度为t的方形边框,并将白砂糖与去离子水以18-22:1的质量比均匀混合后填充至边框内,通过冷冻干燥方式制得的。
11.根据权利要求10所述的抗干扰柔性触觉力感知电容传感器的制备方法,其特征在于:所述4个方形小电极空间上分别位于单电极的四角并与单电极部分重合;方形小电极边长为2a,单电极边长为4a,所述重合的区域为a×a的正方形。
12.根据权利要求11所述的抗干扰柔性触觉力感知电容传感器的制备方法,其特征在于:所述步骤s7中的超声,采用超声波变幅杆,超声波功率不小于260w,超声波振幅不小于30um;所述柔性电容传感器置于超声波变幅杆下方0.5-1.5mm处,以0.3-1mm/s速度移动。
技术总结
本发明涉及柔性压力传感器技术领域,具体提供一种抗干扰柔性触觉力感知电容传感器,结构从上至下依次为上导电屏蔽层、柔性四电极层、泡沫应变层、柔性单电极层、下导电屏蔽层,通过逐层旋涂柔性聚合物溶液粘贴固化为一体;上导电屏蔽层与下导电屏蔽层结构相同;柔性四电极层是在柔性聚合物薄膜表面以丝网印刷方式印有4个方形小电极;泡沫应变层是将柔性聚合物溶液通过真空灌入糖块后去除糖颗粒得到的;柔性单电极层是在柔性聚合物薄膜表面以丝网印刷方式印有1个方形电极。优点在于可有效解耦计算出传感器所受的力的方向和大小,精度高、响应速度快、具有三维触觉力感知,有效克服形变过程中电极与屏蔽层间寄生电容引起的信号不准确的问题。
技术研发人员:董昊轩,盛磊,刘贵林,张俊
受保护的技术使用者:空间液金技术研究(昆山)有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!