一种Y型基线干涉仪测向装置及测向方法
本发明属于干涉仪测向,涉及一种y型基线干涉仪测向装置及测向方法。
背景技术:
1、相位干涉仪具有测向原理简单、测向精度高、运算量小、实时性强等优点,广泛运用于天文、雷达、声纳、导航、电磁环境监测、电子对抗等领域,是无源测向技术中常用的一种手段。相位干涉仪测向方案主要有一维和二维两种,一维为线阵,二维为面阵。测向原理基本相同,因回波均为同频率的余弦信号,阵元之间接收的信号仅有相位不同。一维、二维在测向过程中均是利用短基线(距离小于等于半波长)上的阵元测量出的无模糊相位差,利用相位差可计算粗略的来波方向,再利用长基线提高测量精度,因长基线长度一般均大于半个波长,会出现相位模糊的情况,此时需要利用短基线测出的相位来解算长基线应测出的未模糊相位,利用未模糊相位计算出精度更高的来波方向。
2、现有产品一般使用的就是一种经典的二维十字交叉排列,布置水平和垂直两方向的长短基线进行角度测量,长短基线共设置5个阵元。结合实际应用,在保证精度的前提下,为进一步节约成本,可以对长短基线布局方式进行优化。
技术实现思路
1、本发明的目的是提供一种y型基线干涉仪测向装置及测向方法,以解决如何在优化结构的同时保证总体测向精度的问题,从而降低了成本。
2、为了实现上述目的,本发明采用如下技术方案予以实现:
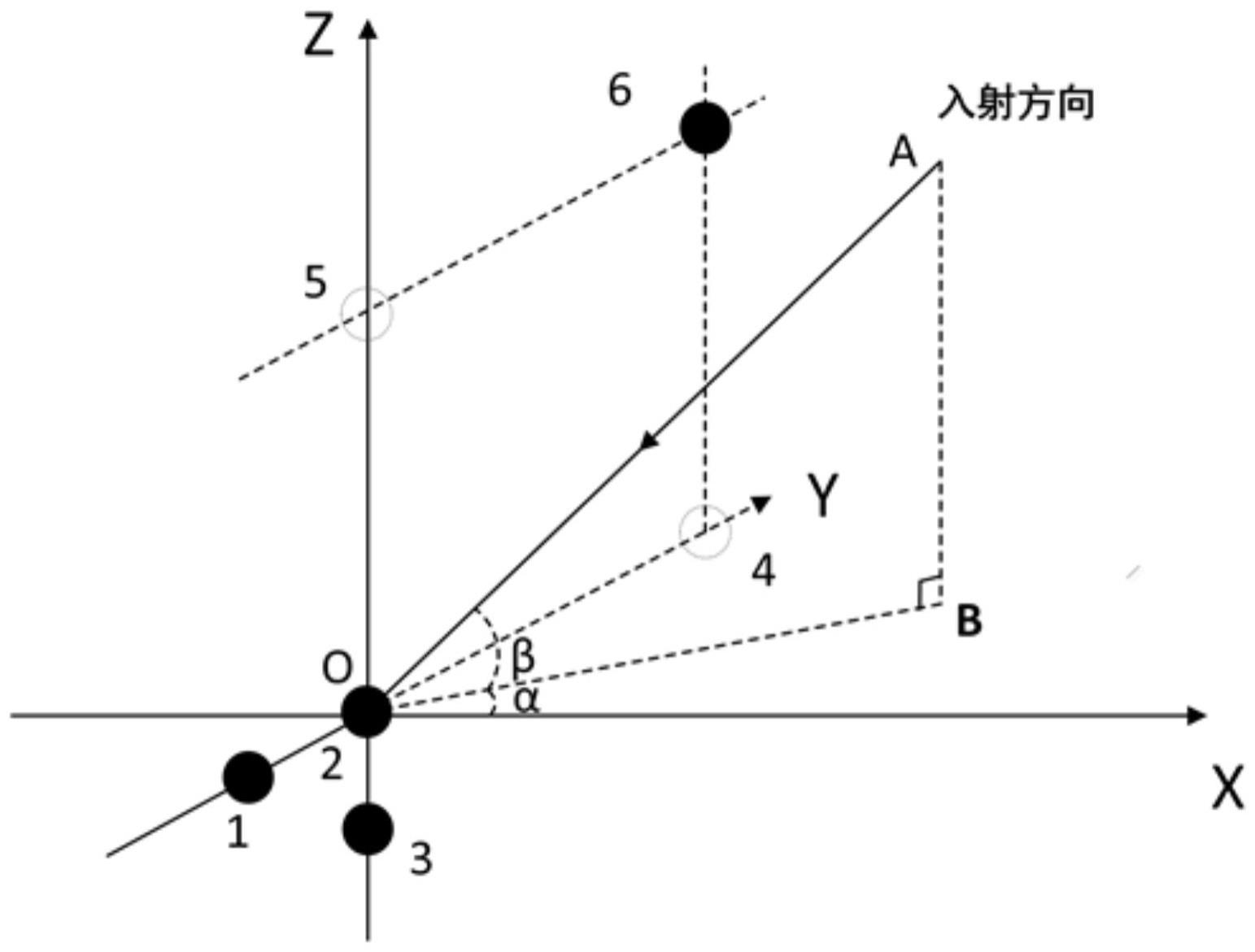
3、一方面,本发明提供一种y型基线干涉仪测向装置,包括y型基线,所述y型基线包括第一阵元、第二阵元、第三阵元和第六阵元,以所述第二阵元为原点o建立oxyz坐标系,所述第一阵元位于y轴的负方向上,第三阵元位于z轴的负方向上,第一阵元和第二阵元之间的连线为第一短基线,第三阵元和第二阵元之间的连线为第二短基线;第一短基线和第二短基线的长度均为d,,λ为入射波波长;在y轴的正方向上设有第一点,在z轴的正方向上设有第二点,所述第一点与第一阵元之间的长度为md,所述第二点与第三阵元之间的长度为md,m>1;所述第六阵元与第一点之间的连线垂直于y轴,第六阵元与第二点之间的连线垂直于z轴;
4、所述第一阵元、第二阵元、第三阵元和第六阵元上均设置有一个接收机;所述第一阵元的接收机与第二阵元的接收机之间、第二阵元的接收机与第三阵元的接收机之间、第一阵元的接收机与第六阵元的接收机之间,以及第三阵元的接收机与第六阵元的接收机之间均设置有一个鉴相器。
5、进一步的,m=3或5。
6、另一方面,本发明提供一种y型基线干涉仪测向方法,该方法基于本发明所述的y型基线干涉仪测向装置,具体包括如下步骤:
7、步骤1,通过第一阵元和第二阵元之间的鉴相器测得无模糊相位差,通过第三阵元和第二阵元之间的鉴相器测得无模糊相位差:
8、步骤2,利用步骤1得到的无模糊相位差和解算阵元之间的精确相位差,包括如下子步骤:
9、步骤21,利用以下两个公式计算得到第一阵元与第六阵元之间的粗相位差,以及第三阵元与第六阵元之间的粗相位差:
10、
11、其中 :
12、—第一阵元和第六阵元之间的粗相位差;
13、—第三阵元和第六阵元之间的粗相位差;
14、—第一阵元和第二阵元之间的鉴相器测得的无模糊相位差;
15、—第三阵元和第二阵元之间的鉴相器测得的无模糊相位差;
16、m—大于1的数;
17、步骤22,利用下列公式计算得到第一阵元和第六阵元之间的精确相位差以及第三阵元和第六阵元之间的精确相位差:
18、
19、
20、其中:
21、—第一阵元和第六阵元之间的精确相位差;
22、—第三阵元和第六阵元之间的精确相位差;
23、—第一阵元和第六阵元之间的鉴相器测得的相位差;
24、—第三阵元和第六阵元之间的鉴相器测得的相位差;
25、o、m—中间量;
26、round—matlab中的四舍五入函数;
27、步骤3,利用以下公式计算被测目标的方位角、被测目标的俯仰角:
28、
29、其中 :
30、α—被测目标的方位角;
31、β—被测目标的俯仰角;
32、—第一阵元和第六阵元之间的精确相位差;
33、—第三阵元和第六阵元之间的精确相位差;
34、λ—入射波波长;
35、m—大于1的数;
36、d—第一短基线或第二短基线的长度;
37、至此,完成y型基线干涉仪测向。
38、相较于现有经典的长短基线技术,本发明在保证足够测向精度的要求下能够将原先的五个阵元简化为四个阵元:
39、(1)在结构上少了一个阵元,能够减少一套接收机设备、简化结构,节约20%的硬件成本;
40、(2)在同样的阵元布面内还可将第一阵元、第六阵元的距离做的更大,采用本发明的测向方法,能够在减少一个阵元的情况下保证总体测量精度,并且在一定范围内提高了测量精度。
技术特征:
1.一种y型基线干涉仪测向装置,其特征在于,包括y型基线,所述y型基线包括第一阵元(1)、第二阵元(2)、第三阵元(3)和第六阵元(6),以所述第二阵元(2)为原点o建立oxyz坐标系,所述第一阵元(1)位于y轴的负方向上,第三阵元(3)位于z轴的负方向上,第一阵元(1)和第二阵元(2)之间的连线为第一短基线,第三阵元(3)和第二阵元(2)之间的连线为第二短基线;第一短基线和第二短基线的长度均为d,,λ为入射波波长;在y轴的正方向上设有第一点,在z轴的正方向上设有第二点,所述第一点与第一阵元(1)之间的长度为md,所述第二点与第三阵元(3)之间的长度为md,m>1;所述第六阵元(6)与第一点之间的连线垂直于y轴,第六阵元(6)与第二点之间的连线垂直于z轴;
2.如权利要求1所述的y型基线干涉仪测向装置,其特征在于,m=3或5。
3.一种y型基线干涉仪测向方法,其特征在于,该方法基于权利要求1或2所述的y型基线干涉仪测向装置,具体包括如下步骤:
技术总结
本发明公开了一种Y型基线干涉仪测向装置及测向方法,Y型基线干涉仪测向装置包括Y型基线,Y型基线包括第一阵元、第二阵元、第三阵元和第六阵元,以第二阵元为原点O建立坐标系,第一阵元位于Y轴的负方向上,第三阵元位于Z轴的负方向上;在Y轴的正方向上设有第一点,在Z轴的正方向上设有第二点,第六阵元与第一点间的连线垂直于Y轴,第六阵元与第二点间的连线垂直于Z轴;第一阵元、第二阵元、第三阵元和第六阵元上均设有一个接收机,接收机之间设置有鉴相器。本发明在保证总体测量精度的要求下能够将经典长短基线的五个阵元简化为四个阵元,从而节约20%的硬件成本,并且在一定范围内提高了测量精度。
技术研发人员:杨剑,李伙明,赵曦晶,董孟琛,王海洋,王忠,姚志成
受保护的技术使用者:中国人民解放军火箭军工程大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!