针对高速目标的雷达多普勒解模糊精确测距方法与流程
本发明属于调频连续波(fmcw)雷达测距领域,具体涉及针对高速目标的雷达多普勒解模糊精确测距方法。
背景技术:
1、fmcw雷达由于具有成本低、功耗低、低截获、小型化、环境适应性强、抗干扰能力强、无距离盲区、测量精度高和易于实现等优点,广泛应用于工业、军事、交通和民用领域的测量与传感。
2、为了满足高速运动目标的速度探测要求,fmcw雷达的调制周期应尽可能短。但受限于实际信号源的扫频能力,fmcw雷达的发射信号的调制时间无法做到太窄,因此当目标高速运动时,fmcw雷达探测到的目标速度将出现混叠,称为速度模糊或者多普勒模糊现象。在极短的调制时间内如果使用vco则极易出现非线性现象,即使使用校正技术也会因为扫频点数不足而出现大量谐波。虽然利用锁相环技术可以解决上述问题,但代价是锁定时间较长,不能满足调制周期的要求。因此,在必须增加调制时间的前提下,需要从算法层面上解决多普勒模糊问题。该模糊问题可以通过优化fmcw雷达的波形,并采用试探法、中国剩余定理和一维集算法等算法搜索最优的模糊度,实现多普勒解模糊,但算法复杂度偏高、计算量较大。
3、由于fmcw雷达通过fft算法提取与目标信息相关的目标中频,因此即使经过速度补偿,fmcw雷达的测距精度仍然受到fft固有的栅栏效应的影响,当且仅当目标中频正好落在频率分辨率的整数倍附近时,测距误差才较小。为了减轻栅栏效应,可以增加fft点数来提高频域采样密度,一般有三种方法:提高采样率、延长采样总时间、采样数据补零。通过增加fft点数虽然简单有效,但同时计算量也会急剧增加。更常用的方法是在原有fft的基础上进行频谱细化,包括全相位fft、zoom-fft、chirp-z变换等算法。
4、对于线性锯齿波调制的fmcw雷达,需要执行2d-fft才能获取目标的距离、速度信息。因此,根据不同维度可以选择不同的频谱细化方法。对于距离fft,由于距离fft点数较多且重点关注测距的结果,因此可以采用chirp-z变换来细化频谱,以获得更精确的距离信息。而对于多普勒fft,由于用于多普勒测量的回波数量较少,可以采用补零操作来增加fft点数,相比于使用chirp-z变换更加经济,利用工程实现。
技术实现思路
1、针对fmcw雷达的多普勒解模糊复杂以及测距精度差的问题,本发明提供针对高速目标的雷达多普勒解模糊精确测距方法,其目的在于:降低多普勒解模糊问题的复杂度,提高fmcw雷达的作用速度和测距精度。
2、本发明采用的技术方案如下:
3、针对高速目标的雷达多普勒解模糊精确测距方法,包括以下步骤:
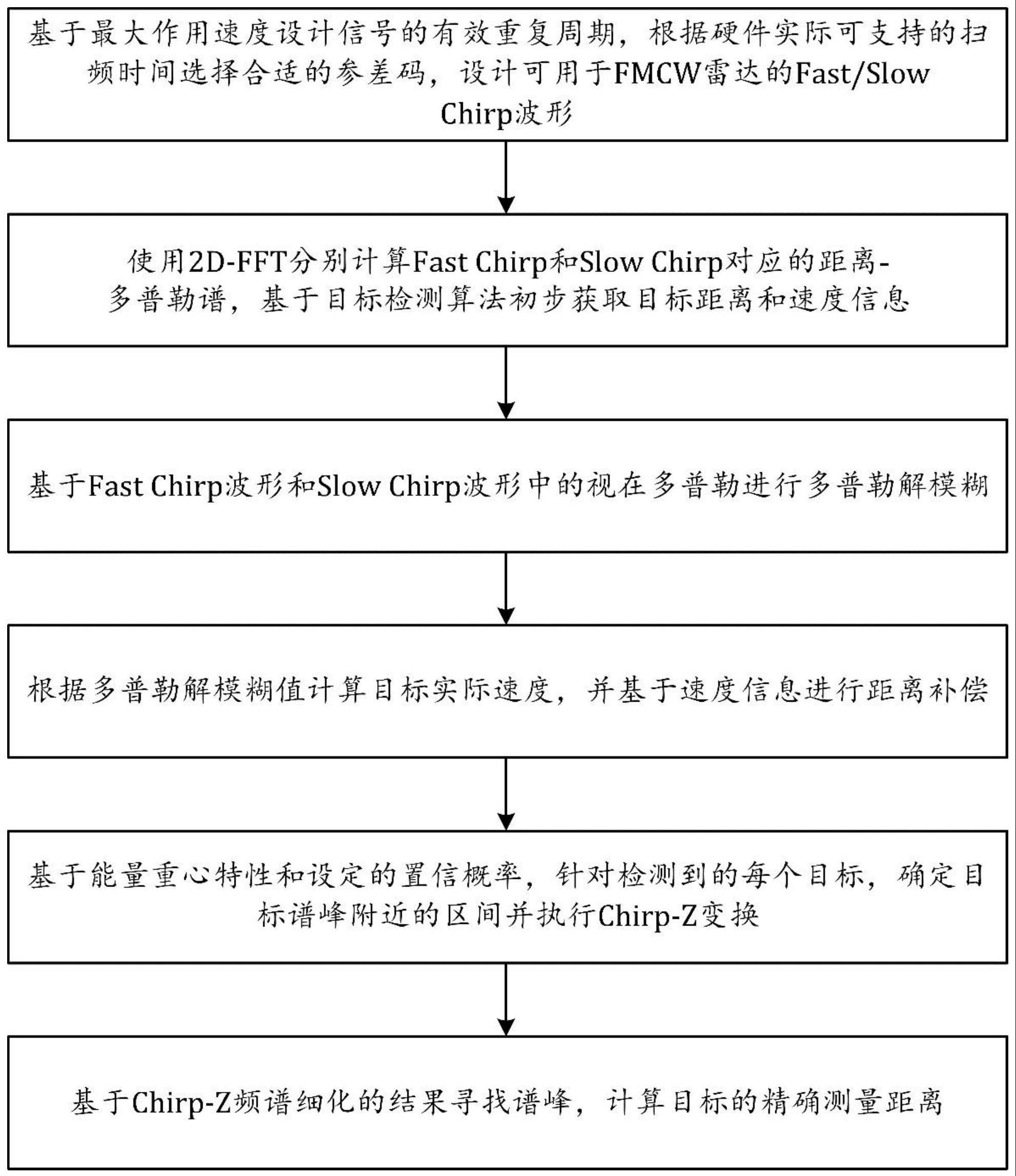
4、步骤1:基于最大作用速度设计信号的有效重复周期,根据硬件实际可支持的扫频时间选择合适的参差码,设计可用于fmcw雷达的fast/slow chirp波形;
5、步骤2:使用2d-fft分别计算fast chirp和slow chirp对应的距离-多普勒谱,基于目标检测算法初步获取目标距离和速度信息;
6、步骤3:基于fast chirp波形和slow chirp波形中的视在多普勒进行多普勒解模糊;
7、步骤4:根据多普勒解模糊值计算目标实际速度,并基于速度信息进行距离补偿;
8、步骤5:基于能量重心特性和设定的置信概率,针对检测到的每个目标,确定目标谱峰附近的区间并执行chirp-z变换;
9、步骤6:基于chirp-z频谱细化的结果寻找谱峰,计算目标的精确测量距离。
10、作为优选技术方案,根据最大作用速度vmax确定信号重复周期prp=λ/4/vmax,根据参差码n0=(n+1)/n,确定slow chirp波形的信号重复周期prpslow=(n+1)·prp和fastchirp波形的信号重复周期prpfast=n·prp,其中正整数n根据硬件实际可支持的扫频时间选择。
11、作为优选技术方案,2d-fft包含距离fft、速度fft,目标检测算法包含二维恒虚警检测、峰值聚合检测。
12、作为优选技术方案,目标在slow chirp波形中的视在多普勒为fd1,在fast chirp波形中的视在多普勒为fd2,基于fast/slow chirp的波形特征计算得到多普勒模糊度,包括:
13、通过fd=mfr1+fd1和fd=nfr2+fd2求解模糊度m和n,其中fd代表目标的真实多普勒,m表示目标在slow chirp波形中的多普勒模糊度,fr1代表slow chirp波形的信号重复频率,n表示目标在fast chirp波形中的多普勒模糊度,fr2代表fast chirp波形的信号重复频率。
14、作为优选技术方案,根据fast/slow chirp波形中的视在多普勒值,对应的多普勒解模糊表达式为:
15、
16、作为优选技术方案,根据多普勒解算值可得目标速度解模糊值vr=λ/2·fd,并根据rreal=rmeasured-vrf0/μ对距离-多普勒耦合进行补偿,其中f0代表发射信号载频,μ代表调制斜率。
17、作为优选技术方案,预设置信概率(取值范围是0.5到1),寻找检测到的目标中频谱峰谱线q。当谱线q-1的能量大于等于谱线q+1的能量时,信号中心频率点在峰值谱线q左侧的概率更大,chirp-z变换的起始频率fstart为fpeak-p·δf,终止频率fend为fpeak+(1-p)·δf;当谱线q-1的能量小于谱线q+1的能量时,信号中心频率点在峰值谱线q右侧的概率更大,chirp-z变换的起始频率fstart为fpeak-(1-p)·δf,终止频率fend为fpeak+p·δf。
18、作为优选技术方案,对频谱细化的结果使用谱峰搜索,求得细化区间内的峰值频率计算目标精确距离
19、由于采用了上述技术方案,本发明的有益效果是:
20、(1)本发明方法通过精心设计的fmcw雷达波形,降低了多普勒解模糊的难度,解模糊方法简单有效,计算量不大且有利于工程实现;
21、(2)本发明方法适用于采用单发单收天线体制的fmcw雷达,降低了天线设计难度;
22、(3)本发明方法针对每种波形的信号处理流程相同,降低了信号处理的复杂性;
23、(4)本发明方法利用基于能量重心特性的改进fft和chirp-z变换算法对进行频谱细化。为了达到相同的频率分辨率,相比于直接fft算法,该改进算法能够有效减少计算量;在计算量相同的情况下,该算法的频率分辨率显著高于直接fft;
24、(5)本发明方法适用于提高fmcw雷达的作用速度和测距精度。
技术特征:
1.针对高速目标的雷达多普勒解模糊精确测距方法,其特征在于:包括以下步骤:
2.根据权利要求1所述的针对高速目标的雷达多普勒解模糊精确测距方法,其特征在于:根据最大作用速度vmax确定信号重复周期prp=λ/4/vmax,根据参差码n0=(n+1)/n,确定slow chirp波形的信号重复周期prpslow=(n+1)·prp和fast chirp波形的信号重复周期prpfast=n·prp,其中正整数n根据硬件实际可支持的扫频时间选择。
3.根据权利要求1所述的针对高速目标的雷达多普勒解模糊精确测距方法,其特征在于:2d-fft包含距离fft、速度fft,目标检测算法包含二维恒虚警检测、峰值聚合检测。
4.根据权利要求1所述的针对高速目标的雷达多普勒解模糊精确测距方法,其特征在于:目标在slow chirp波形中的视在多普勒为,在fast chirp波形中的视在多普勒为,基于fast/slow chirp的波形特征计算得到多普勒模糊度,包括:
5.根据权利要求4所述的针对高速目标的雷达多普勒解模糊精确测距方法,其特征在于:根据fast/slow chirp波形中的视在多普勒值,对应的多普勒解模糊表达式为:
6.根据权利要求1所述的针对高速目标的雷达多普勒解模糊精确测距方法,其特征在于:根据多普勒解算值可得目标速度解模糊值vr=λ/2·fd,并根据rreal=rmeasured-vrf0/μ对距离-多普勒耦合进行补偿,其中f0代表发射信号载频,μ代表调制斜率。
7.根据权利要求1所述的针对高速目标的雷达多普勒解模糊精确测距方法,其特征在于:预设置信概率p,寻找检测到的目标中频谱峰谱线q;当谱线q-1的能量大于等于谱线q+1的能量时,信号中心频率点在峰值谱线q左侧的概率更大,chirp-z变换的起始频率fstart为fpeak-p·δf,终止频率fend为fpeak+(1-p)·δf;当谱线q-1的能量小于谱线q+1的能量时,信号中心频率点在峰值谱线q右侧的概率更大,chirp-z变换的起始频率fstart为fpeak-(1-p)·δf,终止频率fend为fpeak+p·δf。
8.根据权利要求1所述的针对高速目标的雷达多普勒解模糊精确测距方法,其特征在于:对频谱细化的结果使用谱峰搜索,求得细化区间内的峰值频率计算目标精确距离
技术总结
本发明公开了针对高速目标的雷达多普勒解模糊精确测距方法,包括以下步骤:步骤1:基于最大作用速度设计信号的有效重复周期,根据硬件实际可支持的扫频时间选择合适的参差码,设计可用于FMCW雷达的Fast/Slow Chirp波形;步骤2:使用2D‑FFT分别计算FastChirp和SlowChirp对应的距离‑多普勒谱,基于目标检测算法初步获取目标距离和速度信息;步骤3:基于FastChirp波形和SlowChirp波形中的视在多普勒进行多普勒解模糊;步骤4:根据多普勒解模糊值计算目标实际速度,并基于速度信息进行距离补偿。本发明可用于解决FMCW雷达在极短时间内的硬件扫频困难问题;提高雷达的作用速度,解决高速运动目标引起的多普勒耦合与模糊问题;提高雷达的测距精度,实现对高速运动目标距离的精确测。
技术研发人员:孙旭,刘劭扬,吴鹏,于文卓,陈琴
受保护的技术使用者:成都尼晟科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!