基于低轨卫星信号多普勒误差补偿的运动目标定位方法
本发明属于卫星导航,涉及一种运动目标定位方法,具体涉及一种基于低轨卫星机会信号多普勒误差补偿的运动目标定位方法,可用于运动目标导航。
背景技术:
0、技术背景
1、低轨道卫星主要是指运行在低轨道平台的卫星系统,其运行轨道一般在距离地面500-2000公里之间。低轨卫星导航是指使用低轨卫星发射的信号的伪距、多普勒、载波相位等信息进行导航。
2、机会信号是指环境中所有潜在的无线电信号,常见的机会信号包括wi-fi信号、电视信号、广播信号、低轨卫星信号等。合作卫星指的是卫星信号体制等信息完全已知的卫星,但低轨卫星通常是非合作的,非合作卫星不会公开其详细的信号结构与体制信息,人们对于信号的信息了解很少。基于机会信号的导航指从接收到的机会信号中提取有用的信息用以导航,由于信号不是以导航为目的发射的,其原理与gnss信号实现导航的原理也有所不同。
3、目前,应用最广泛的导航方式是全球导航卫星系统(global navigationsatellite system,gnss)。但是,gnss卫星均为中高轨道卫星,由于gnss信号自身存在局限性,如信号到达地球表面功率低、在传输过程中容易受到干扰和遮挡等,仅依靠gnss进行导航往往存在一定的风险,因此机会信号导航系统作为一种有效的辅助手段备受青睐。
4、与gnss卫星相比,低轨卫星的轨道更低,信号到达地面的功率更强,且卫星位置变化快,能够为导航提供更好的轨道构型。专为导航设计的卫星上会搭载高精度的原子钟,且时钟是严格同步的。但在低轨卫星的机会信号导航中,一方面大多数低轨卫星的用途均为通信,一般不会在卫星上配备高精度的原子钟,另一方面低轨卫星多为商业卫星,因此不会公开卫星信号体制及时钟等信息,只能使用机会信号进行定位。
5、例如,申请公布号为cn106772502a,名称为“低轨卫星备份导航系统多普勒定位解算方法”的专利申请,公开了一种低轨卫星备份导航系统多普勒定位解算方法,该方法是一种大区域网格搜索粗定位与牛顿最小二乘迭代计算相结合的多普勒定位解算方法,通过获取定位解算所需的卫星三维位置、三维速度和多普勒频率观测量,然后进行大区域网格搜索,实现用户粗定位,并通过牛顿最小二乘法,完成多普勒定位解算,得到目标定位结果,利用少量的多普勒观测信息实现了多种不同可见星数量条件下的连续定位解算,提高了定位精度,但由于其直接使用测量到的多普勒频率进行定位解算,在使用非合作低轨卫星机会信号进行多普勒定位时,定位精度仍然较差。
技术实现思路
1、本发明的目的在于针对上述现有技术的不足,提出一种基于低轨卫星机会信号多普勒误差补偿的运动目标定位方法,用于解决现有技术中存在的因非合作低轨卫星机会信号中存在多普勒误差导致的定位精度较低的技术问题。
2、为实现上述目的,本发明采取的技术方案包括如下步骤:
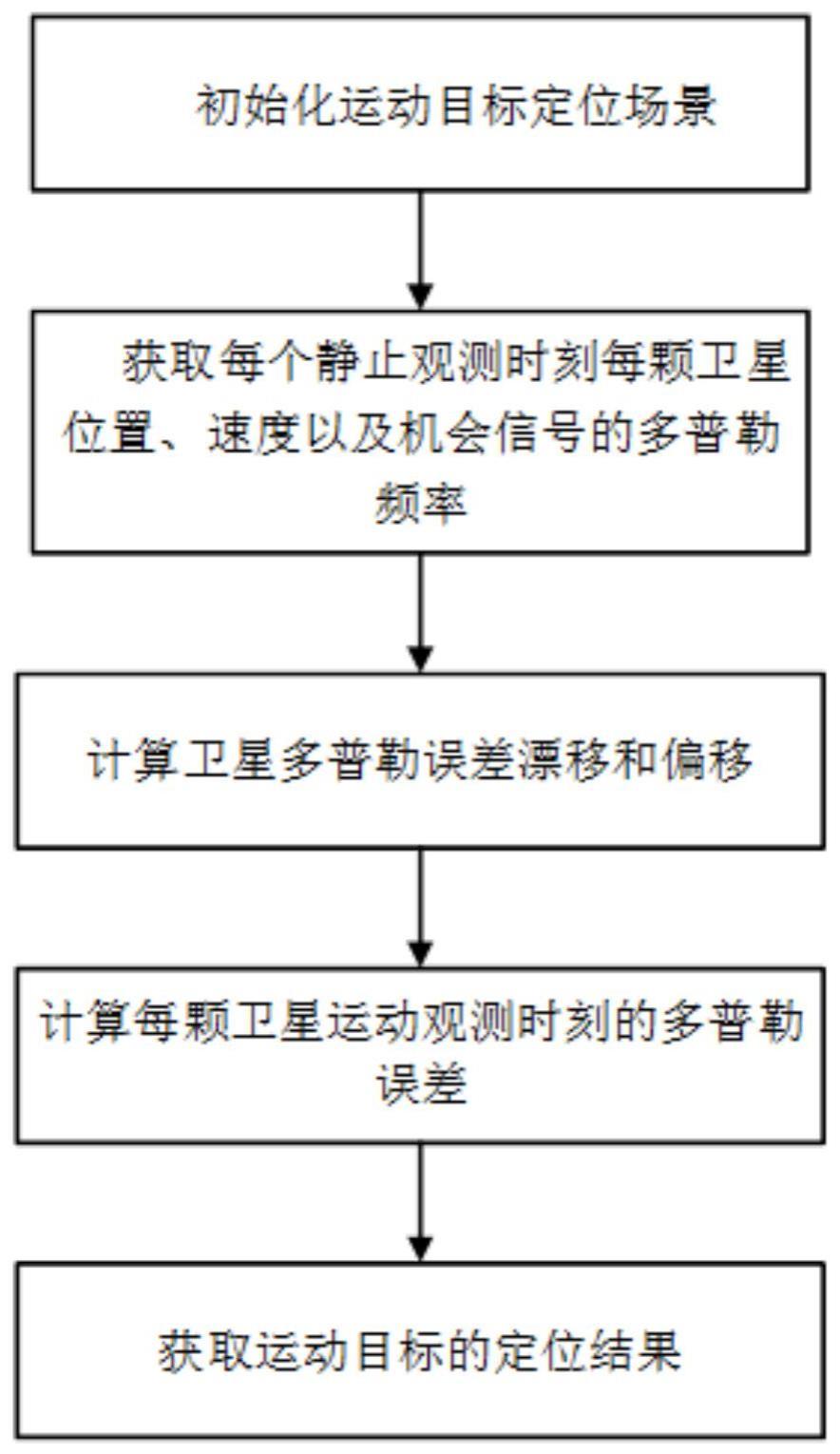
3、(1)初始化运动目标定位场景:
4、初始化包括分布在三维空间中的目标和n颗低轨卫星的运动目标定位场景,目标的静止观测时间包括k个静止观测时刻,目标的静止位置为s0,目标的运动观测时间为t;每颗卫星对应的多普勒误差漂移、多普勒误差偏移分别为an、bn;卫星机会信号的载波频率为f0,其中,n≥6,k≥3;
5、(2)获取每个静止观测时刻每颗卫星的位置、速度以及机会信号的多普勒频率:
6、获取第n颗低轨卫星第k个静止观测时刻的轨道位置rn(k)=[xn(k),yn(k),zn(k)]和速度测量卫星机会信号的多普勒频率
7、(3)计算卫星的多普勒误差漂移和偏移:
8、建立每颗卫星每个静止观测时刻的多普勒测量方程并将n颗卫星k个静止观测时刻的机会信号的多普勒测量方程组成多普勒测量方程组,然后使用牛顿最小二乘迭代法对该方程组进行求解,得到每颗卫星对应的多普勒误差漂移an和多普勒误差偏移bn,其中的表达式为:
9、
10、其中,c表示光速,||·||2表示求二范数操作;
11、(4)计算每颗卫星运动观测时刻的多普勒误差:
12、通过每颗卫星对应的多普勒误差漂移an和多普勒误差偏移bn计算运动观测时刻t的多普勒误差dn(t);
13、(5)获取运动目标的定位结果:
14、建立每颗卫星运动观测时刻t的关于目标运动观测时刻t的位置s(t)和速度v(t)的多普勒误差补偿定位方程fdn(t),并将n颗卫星的多普勒定位方程组成多普勒误差补偿定位方程组,然后使用牛顿最小二乘迭代法对运动目标多普勒定位方程组进行求解,得到运动目标在t时刻的位置s(t)=[x(t),y(t),z(t)]和速度v(t)=[vx(t),vy(t),vz(t)],其中fdn(t)的表达式为:
15、
16、本发明与现有技术相比,具有以下优点:
17、本发明通过每颗卫星对应的多普勒误差漂移和多普勒误差偏移计算运动观测时刻的多普勒误差,并通过多普勒误差对测量多普勒频率进行补偿,消除了非合作低轨卫星机会信号包含的时钟误差对所测量的多普勒频率中存在的多普勒测量误差的影响,与现有技术相比,有效提高了运动目标的定位精度。
技术特征:
1.一种基于低轨卫星机会信号多普勒误差补偿的运动目标定位方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的基于低轨卫星机会信号多普勒误差补偿的运动目标定位方法,其特征在于,步骤(2)中所述的第n颗低轨卫星第k个静止观测时刻的轨道位置rn(k)=[xn(k),yn(k),zn(k)]和速度是通过公开的卫星tle文件获取的,其中,rn(k)和vn(k)分别表示第n颗低轨卫星k时刻的三维位置和三维速度。
3.根据权利要求1所述的基于低轨卫星机会信号多普勒误差补偿的运动目标定位方法,其特征在于,步骤(3)中所述的对多普勒测量方程组进行求解,实现步骤为:
4.根据权利要求1所述的基于低轨卫星机会信号多普勒误差补偿的运动目标定位方法,其特征在于,步骤(4)中所述的多普勒误差dn(t),计算公式为:
5.根据权利要求1所述的基于低轨卫星机会信号多普勒误差补偿的运动目标定位方法,其特征在于,步骤(5)中所述的使用牛顿最小二乘迭代法,并通过每颗卫星在该时刻的轨道位置、速度、机会信号的多普勒频率rn(t)、vn(t)和fdn(t)对运动目标多普勒定位方程组进行求解,实现步骤为:
技术总结
本发明提出了一种基于低轨卫星机会信号多普勒误差补偿的运动目标定位方法,实现步骤为:初始化运动目标定位场景;获取每个静止时刻每颗卫星位置、速度以及机会信号的多普勒频率;计算卫星的多普勒误差漂移和偏移;计算每颗卫星运动观测时刻的多普勒误差;获取运动目标的定位结果。本发明通过对低轨卫星机会信号多普勒频率误差进行建模与补偿,提升了运动目标的定位精度。
技术研发人员:臧博,杨超群,李林,代传金,张良,吴伟,张文博,龙璐岚,李斌,姬红兵
受保护的技术使用者:西安电子科技大学
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!