一种基于剪枝最小二乘的多普勒计程仪标定方法及装置
本发明涉及组合导航。
背景技术:
1、随着对海洋的拓展与探索,自主水下潜航器在海洋权益维护和海洋开发等方面均有广泛的应用,高精度导航是水下航行器能够完成预定任务的前提与保障。捷联惯性导航系统(sins)以其充分的自主性、短时高精度、良好的隐蔽性成为水下航行器的首选,但由于惯性装置的误差,导航定位误差随时间积累。将捷联惯性导航系统和多普勒计程仪(dvl)系统两种方式结合,可以构成具有高精度、高可靠性的sins/dvl组合导航系统,是目前比较成功的水下组合导航系统。
2、多普勒测速精度是sins/dvl组合导航精度的决定性因素。多普勒的测速误差主要有两部分组成:标度因数误差和安装偏差。若不对惯导与多普勒的安装偏差进行标定,将产生一定的测速误差,从而影响导航定位精度。多普勒计程仪在海上进行标定时常常会受到海洋环境场的干扰,从而会对多普勒计程仪的标定精度造成极大的影响,在海况较为恶劣的条件下,甚至标定失效。然而任何声呐性能均与海洋环境密切相关,如何实现复杂环境下的精确标定是计程仪工程应用中面临的实际问题。在复杂环境下的捷联惯性导航/多普勒计程仪标定具有较高的研究价值。
3、因此,如何提供一种在复杂环境下实现准确标定结果的多普勒计程仪标定方法,成为本领域亟待解决的技术问题。
技术实现思路
1、为了解决上述技术问题,本发明提供了一种基于剪枝最小二乘的多普勒计程仪标定方法及装置,该方法利用剪枝最小二乘估计的高崩溃点特性,有效降低了复杂环境下dvl测量异常值对标定结果的影响,获得更准确的标定结果。
2、基于同一发明构思,本发明具有三个独立的技术方案:
3、1、一种基于剪枝最小二乘的多普勒计程仪标定方法,包括:
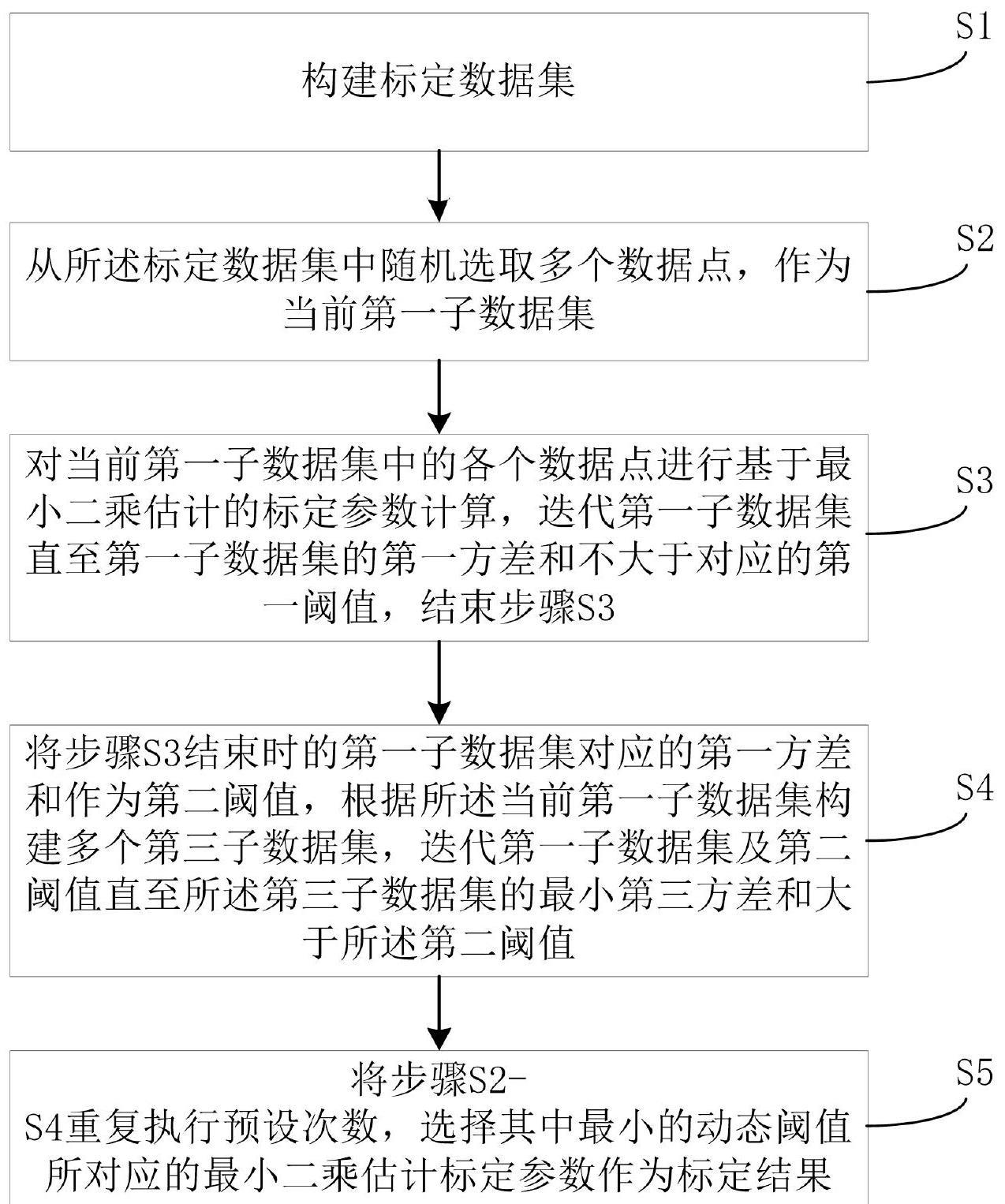
4、s1、构建标定数据集;
5、s2、从所述标定数据集中随机选取多个数据点,作为当前第一子数据集;
6、s3、对当前第一子数据集中的各个数据点进行基于最小二乘估计的标定参数计算,迭代第一子数据集直至第一子数据集的第一方差和β不大于对应的第一阈值βtls,结束步骤s3;
7、s4、将步骤s3结束时的第一子数据集对应的第一方差和作为第二阈值,根据所述当前第一子数据集构建多个第三子数据集,迭代第一子数据集及第二阈值直至所述第三子数据集的最小第三方差和大于所述第二阈值;
8、s5、将步骤s2-s4重复执行预设次数,选择其中最小的动态阈值βtls所对应的最小二乘估计标定参数作为标定结果。
9、进一步地,所述标定数据集中包括:由sins/gps组合导航系统解算得到的运载体在载体坐标系的速度,以及由dvl测量得到的运载体在dvl坐标系的速度。
10、进一步地,步骤s2中,当前第一子数据集中的数据点个数通过如下公式确定:
11、h=int(n/2)+1;
12、其中,int(·)表示向下取整运算,n表示标定数据集中数据点个数。
13、进一步地,步骤s3包括:
14、s31、对当前第一子数据集中的各个数据点进行基于最小二乘估计的标定参数计算,获得第一标定参数α0以及对应的第一方差和β;
15、s32、判断第一方差和β是否大于所述第一阈值βtls,若是,则将所述第一阈值βtls对应的数据点作为当前第一子数据集,并重复步骤s31,否则结束步骤s3。
16、进一步地,所述第一阈值通过如下步骤计算:计算所述标定数据集中各个数据点与所述第一标定参数α0对应的方差并按升序排列,计算升序排列后前h个方差之和,作为第一阈值βtls,h为当前第一子数据集中数据点个数。
17、进一步地,步骤s4包括:
18、s41、将所述标定数据集中除当前第一子数据集之外的n-h个数据点分别添加至当前第一子数据集中,构成n-h个第二子数据集;
19、s42、基于最小二乘估计获得各个第二子数据集的第二标定参数以及对应的第二方差和,选择其中第二方差和最小的第二子数据集作为当前第二子数据集;
20、s43、将当前第二子数据集中包含的h+1个数据点分别删除,得到h+1个含h个数据点的第三子数据集,基于最小二乘估计得到各个第三子数据集的第三标定参数以及对应的第三方差和;
21、s44、判断其中的最小第三方差和βmin是否小于所述第二阈值,若是,则将当前的最小第三方差和作为第二阈值,将对应的第三子数据集作为当前第一子数据集,并重复步骤s41-s43,否则结束步骤s4。
22、进一步地,所述最小二乘估计的观测量为运载体在载体坐标系的速度与在dvl坐标系的速度之差。
23、进一步地,所述最小二乘估计的观测方程为:
24、z=hx+v;
25、
26、其中,v表示量测噪声向量,h表示量测转移矩阵,分别表示运载体速度在载体坐标系x、y、z坐标轴的投影分量,分别表示运载体速度在dvl坐标系x、y、z坐标轴的投影分量,x=[φx φy φz k]表示由待标定参数构成的状态向量,φj(j=x,y,z)表示j轴方向安装误差,k为刻度系数误差。
27、2、一种计算机可读存储介质,其上存储有可执行指令,该指令被处理器执行时使处理器执行上述方法。
28、3、一种电子设备,包括处理器和存储装置,所述存储装置中存有多条指令,所述处理器用于读取所述存储装置中的多条指令并执行上述方法。
29、本发明提供的基于剪枝最小二乘的多普勒计程仪标定方法及装置,至少包括如下有益效果:
30、该方法利用剪枝最小二乘估计的高崩溃点特性,有效降低了复杂环境下dvl测量异常值对标定结果的影响,从而获得相对真实的标定结果,并采用联合全局和局部方差作为动态门限,对异常测量值进行检测;与传统的最小二乘法相比,剪枝最小二乘估计具有更高的鲁棒性,它能有效降低异常数据对参数估计的影响,从而获得更加准确的估计结果,具有一定的工程应用价值。
技术特征:
1.一种基于剪枝最小二乘的多普勒计程仪标定方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述标定数据集中包括:由sins/gps组合导航系统解算得到的运载体在载体坐标系的速度,以及由dvl测量得到的运载体在dvl坐标系的速度。
3.根据权利要求1所述的方法,其特征在于,步骤s2中,当前第一子数据集中的数据点个数通过如下公式确定:
4.根据权利要求1所述的方法,其特征在于,步骤s3包括:
5.根据权利要求4所述的方法,其特征在于,所述第一阈值通过如下步骤计算:计算所述标定数据集中各个数据点与所述第一标定参数α0对应的方差并按升序排列,计算升序排列后前h个方差之和,作为第一阈值βtls,h为当前第一子数据集中数据点个数。
6.根据权利要求4所述的方法,其特征在于,步骤s4包括:
7.根据权利要求1所述的方法,其特征在于,所述最小二乘估计的观测量为运载体在载体坐标系的速度与在dvl坐标系的速度之差。
8.根据权利要求1所述的方法,其特征在于,所述最小二乘估计的观测方程为:
9.一种计算机可读存储介质,其上存储有可执行指令,其特征在于,该指令被处理器执行时使处理器执行根据权利要求1-8中任一项所述的方法。
10.一种电子设备,包括处理器和存储装置,其特征在于,所述存储装置中存有多条指令,所述处理器用于读取所述存储装置中的多条指令并执行如权利要求1-8任一项所述的方法。
技术总结
一种基于剪枝最小二乘的多普勒计程仪标定方法及装置,涉及组合导航技术领域,解决的技术问题为“如何提供一种在复杂环境下实现准确标定的多普勒计程仪标定方法”,方法包括:构建标定数据集;从所述标定数据集中随机选取多个数据点,作为当前第一子数据集;对当前第一子数据集中的各个数据点进行基于最小二乘估计的标定参数计算,迭代第一子数据集直至第一子数据集的第一方差和不大于对应的第一阈值;迭代第一子数据集及第二阈值直至所述第三子数据集的最小第三方差和大于所述第二阈值;将上述步骤重复执行预设次数,选择其中最小的第二阈值所对应的最小二乘估计标定参数;该方法利用剪枝最小二乘估计的高崩溃点特性,获得更准确的标定结果。
技术研发人员:李帅阳,赵玉新,奔粤阳,李倩,辛傲,李恒,龚胜,方时铮,邓子豪,李紫璇
受保护的技术使用者:哈尔滨工程大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!