一种基于图神经网络的多尺度道路数据匹配方法
本发明涉及地图综合应用,具体涉及一种基于图神经网络的多尺度道路数据匹配方法。
背景技术:
1、随着社会经济的发展,各领域应用部门对道路数据的质量和现势性的要求越来越高。为了保持道路数据的现势性需要对道路数据网进行更新,而不同尺度的道路数据是分层独立储存的,在数据更新过程中需要对不同尺度的数据分别进行更新,这样的更新方式显然需要耗费大量的时间,严重的影响了地理空间数据的现势性。因此将多尺度数据进行关联,有助于空间数据的高效利用,缓解社会经济发展高速发展与地理空间数据现势性低之间的矛盾。
2、道路数据匹配作为多源数据融合,多尺度空间数据更新的关键技术,而相邻尺度道路数据因为尺度不同造成了几何和属性信息,其匹配一直是业界的难点。现有的道路匹配算法较为简单,往往依赖于相似性权值和匹配阈值等人为主观因素的影响,从而导致现有的道路匹配方法存在匹配精度不高的问题。
技术实现思路
1、为了解决现有的道路匹配方法存在匹配精度不高的技术问题,本发明的目的在于提供一种基于图神经网络的多尺度道路数据匹配方法,所采用的技术方案具体如下:
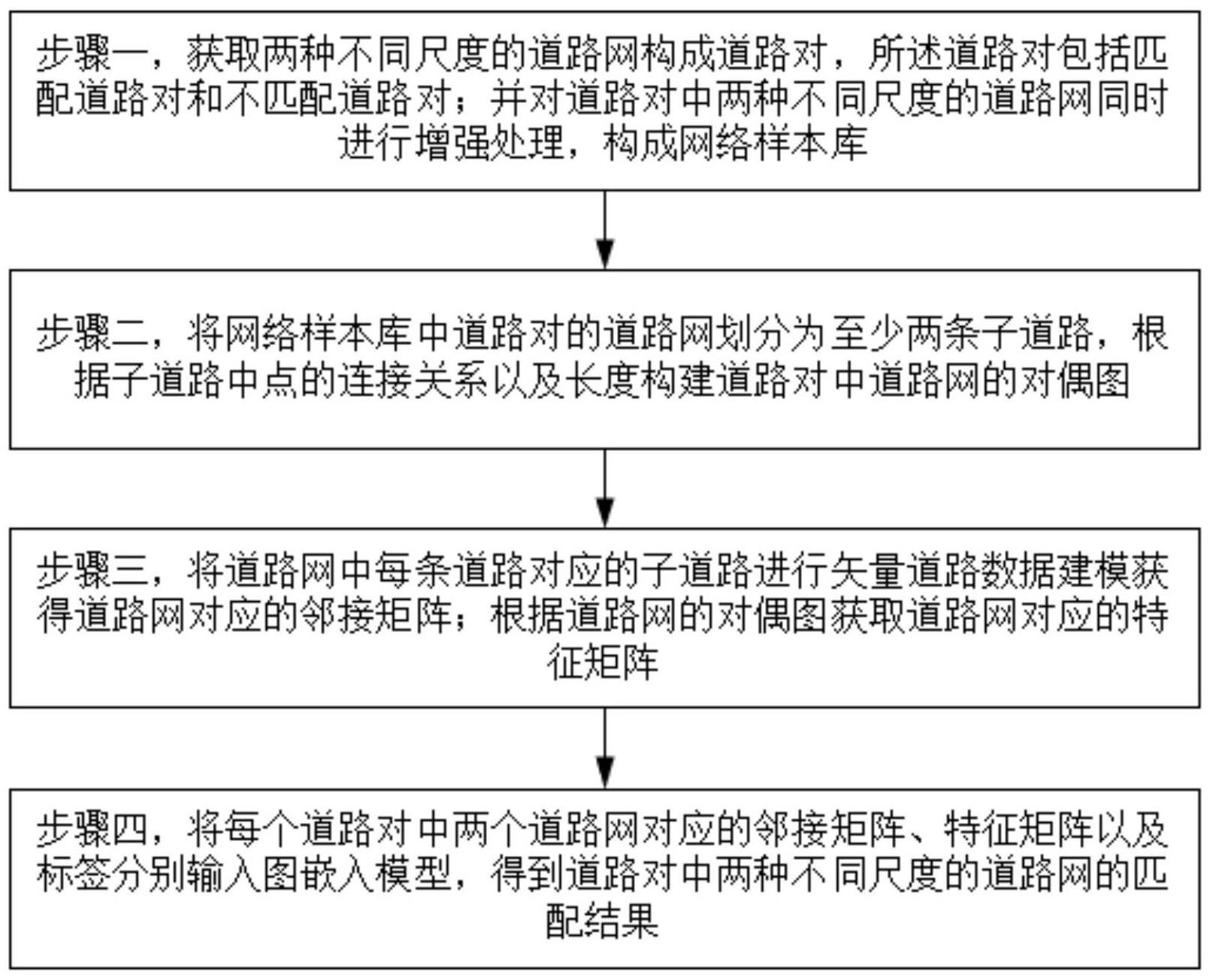
2、获取两种不同尺度的道路网构成道路对,所述道路对包括匹配道路对和不匹配道路对;并对道路对中两种不同尺度的道路网同时进行增强处理,构成网络样本库;
3、将网络样本库中道路对的道路网划分为至少两条子道路,根据子道路中点的连接关系以及长度构建道路对中道路网的对偶图;
4、将道路网中每条道路对应的子道路进行矢量道路数据建模获得道路网对应的邻接矩阵;根据道路网的对偶图获取道路网对应的特征矩阵;
5、将每个道路对中两个道路网对应的邻接矩阵和特征矩阵分别输入图嵌入模型,得到道路对中两种不同尺度的道路网的匹配结果。
6、优选地,所述对道路对中两种不同尺度的道路网同时进行增强处理具体为:
7、对道路对中两种不同尺度的道路网同时进行旋转变换和缩放变换;
8、其中,旋转变换的方法具体为:预设旋转坐标点与旋转角度范围,将两种不同尺度的道路网同时绕旋转坐标点,在旋转角度范围内旋转相同的角度得到新的道路对作为增强后的道路对数据;
9、缩放变换的方法具体为:获取道路网中道路首尾两点连线的中点作为缩放的中心点,设定道路缩放的比例范围;将两种不同尺度的道路网在缩放的比例范围内,同比例进行缩放得到新的道路作为增强后的道路对数据。
10、优选地,所述根据子道路中点的连接关系以及长度构建道路对中道路网的对偶图具体为:
11、将每条子道路对应的子曲线作为对偶图的节点;
12、获取每条子道路对应的子曲线的首节点和尾节点的中点,获取任意两个中点连线的长度,将长度满足长度阈值的两个中点连线作为两个中点对应的子道路之间的连接关系;将子道路之间的连接关系作为节点之间的边;
13、构建道路对中道路网的对偶图。
14、优选地,所述邻接矩阵的获取方法具体为:
15、
16、其中,a为邻接矩阵,n为每条道路对应的子道路的数量。
17、优选地,所述根据道路网的对偶图获取道路网对应的特征矩阵具体为:
18、对于任意一条道路,获取道路上每个子道路的m个特征描述值,构建大小为n×m的道路的特征矩阵,其中,n为道路包含的子道路的数量。
19、优选地,所述图嵌入模型包括:节点嵌入模块、图嵌入模块和匹配模块。
20、优选地,所述将每个道路对中两个道路网对应的邻接矩阵和特征矩阵分别输入图嵌入模型,得到道路对中两种不同尺度的道路网的匹配结果,具体包括:
21、对于一个道路对,将两个道路网对应的邻接矩阵和特征矩阵分别输入孪生神经网络的两个结构相同且权值共享的子网络中得到道路对中两种不同尺度的道路网的匹配结果,所述孪生神经网络的每个子网络由一个多层感知机和多个图卷积层组成。
22、本发明实施例至少具有如下有益效果:
23、本发明基于图神经网络的基础上提出图嵌入模型来提高多尺度道路数据匹配的正确率,在道路数据转化为图数据的方法中提出一种新型的矢量道路数据网来构建对偶图的方式,在以往的匹配方法中,传统方法在一定程度上耗时耗力,实验结果受人为主观因素的影响。本发明充分利用神经网络自主学习的特性,增强了道路匹配的自动化进程,克服人为干预的影响,在特征选择中以几何特征选取为主,极大提高了匹配结果的准确性,并对不同特征进行组合,保证本发明的时效性与准确度。
技术特征:
1.一种基于图神经网络的多尺度道路数据匹配方法,其特征在于,该方法包括以下步骤:
2.根据权利要求1所述的一种基于图神经网络的多尺度道路数据匹配方法,其特征在于,所述对道路对中两种不同尺度的道路网同时进行增强处理具体为:
3.根据权利要求1所述的一种基于图神经网络的多尺度道路数据匹配方法,其特征在于,所述根据子道路中点的连接关系以及长度构建道路对中道路网的对偶图具体为:
4.根据权利要求1所述的一种基于图神经网络的多尺度道路数据匹配方法,其特征在于,所述邻接矩阵的获取方法具体为:
5.根据权利要求4所述的一种基于图神经网络的多尺度道路数据匹配方法,其特征在于,所述根据道路网的对偶图获取道路网对应的特征矩阵具体为:
6.根据权利要求1所述的一种基于图神经网络的多尺度道路数据匹配方法,其特征在于,所述图嵌入模型包括:节点嵌入模块、图嵌入模块和匹配模块。
7.根据权利要求1所述的一种基于图神经网络的多尺度道路数据匹配方法,其特征在于,所述将每个道路对中两个道路网对应的邻接矩阵和特征矩阵分别输入图嵌入模型,得到道路对中两种不同尺度的道路网的匹配结果,具体包括:
技术总结
本发明涉及地图综合应用技术领域,具体涉及一种基于图神经网络的多尺度道路数据匹配方法,该方法包括:获取两种不同尺度的道路网构成道路对;对道路对中两种不同尺度的道路网同时进行增强处理构成网络样本库;将道路对的道路网划分为至少两条子道路,根据子道路中点的连接关系以及长度构建道路对中道路网的对偶图;将道路网中每条道路对应的子道路进行矢量道路数据建模获得道路网对应的邻接矩阵;根据道路网的对偶图获取道路网对应的特征矩阵;将每个道路对中两个道路网对应的邻接矩阵和特征矩阵分别输入图嵌入模型,得到道路对中两种不同尺度的道路网的匹配结果。本发明提高了多尺度道路数据匹配的精度。
技术研发人员:许俊奎,刘春,武芳,姜皓哲,庄清文
受保护的技术使用者:河南大学
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!