一种基于KF的旋转平台接收机高灵敏度跟踪方法
本发明涉及信号接收,特别涉及一种基于kf的旋转平台接收机高灵敏度跟踪方法。
背景技术:
1、目前世界各国都在致力于发展低成本、高精度的制导炮弹,而作为精确制导炮弹的核心组成,卫星导航系统成为了重点研究对象。卫星导航为其提供高精度的位置和速度信息,能够有效提高制导炮弹的制导精度。针对炮弹、榴弹等自旋的特点,研究旋转平台下的小型、低成本、高度集成的卫星导航系统是未来发展的重要方向之一。
2、传统接收机一般采用的是最小二乘的定位算法,虽然最小二乘能在含有误差与噪声的测量值中找到最优点,使得所有测量值的残余平方和最小,但由于不同时刻的不同测量误差与噪声在最小二乘法计算后转化为相应时刻的不同定位误差和噪声,因而其定位结果通常粗糙且杂乱,在炮弹载体旋转的过程中,旋转平台上的卫星导航接收机出现卫星信噪比突然衰落、卫星信号突然丢失等问题时,会因为传统接收机无法有效跟踪接收到的信号,进而不能提供可靠的位置定位,导致卫星导航系统定位误差较大、无法精确制导。
技术实现思路
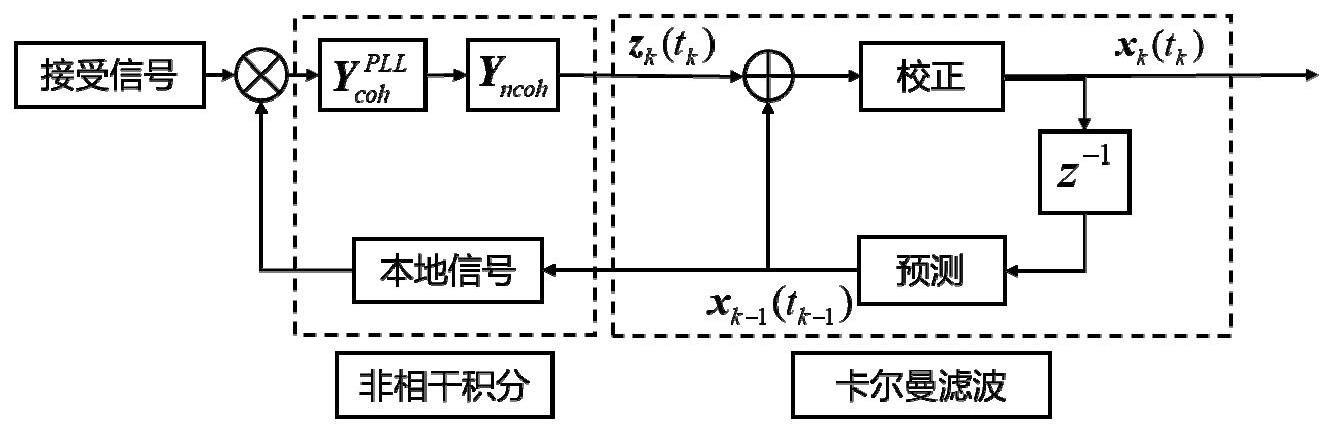
1、为解决上述问题,本发明提供了一种基于kf的旋转平台接收机高灵敏度跟踪方法,利用卡尔曼滤波(kalman filtering,kf)技术,对最小二乘结果进行一定的滤波处理,克服了最小二乘不同时刻的值不相关联的缺点,使定位结果更为平滑、准确;同时结合非线性相干积分提高对弱信号的灵敏度,实现在载体旋转过程中能够有效的跟踪卫星信号,并提供精确的定位结果。
2、本发明提供了一种基于kf的旋转平台接收机高灵敏度跟踪方法,具体技术方案如下:
3、方法应用于卫星导航接收机系统,包括如下步骤:
4、s1:确定卡尔曼滤波预测过程中的系统状态方程和系统先验估计误差的均方误差阵方程;
5、s2:确定系统的状态向量xk(tk)和观测向量zk(tk)之间的关系;
6、s3:计算理想状态的卫星导航接收机中跟踪环路中的锁相环的相干积分
7、s4:通过相干积分的平方,计算非相干和相干组合积分
8、s5:根据扩展后的非相干和相干组合积分结果,计算卡尔曼滤波的相干和非相干组合积分信号yncoh;
9、s6:修改卡尔曼滤波器的系统先验估计误差的均方误差阵方程和状态转移矩阵fk;
10、s7:卡尔曼滤波预测系统状态后,进行校正,具体过程如下:
11、计算卡尔曼滤波系统的校正增益,然后将状态估计值更新,最后由先验值计算系统的后验估计误差的均方误差矩阵,完成校正。
12、进一步的,系统状态方程和系统先验估计误差的均方误差阵方程如下:
13、xk+1(tk+1)=f(tk)xk(tk)+c(tk)wk(tk)
14、
15、其中,系统状态方程中xk(tk)是系统在tk时间的状态向量,xk+1(tk+1)是系统在tk+1时间的状态向量,wk(tk)是过程噪声向量,f(tk)表示从tk个时刻到tk+1个时刻的状态转移矩阵,c(tk)是有色噪声状态转移矩阵;pk是后验估计均方误差阵,q是状态转移噪声协方差矩阵,其满足δkn是克罗内克函数。
16、进一步的,根据系统测量延时和离散化模型,所述状态转移矩阵的定义如下:
17、
18、其中,β表示载波辅助因子。
19、进一步的,所述系统的状态向量xk(tk)和观测向量zk(tk)之间的关系如下:
20、zk(tk)=hxk(tk)+vk(tk)
21、其中,h表示观测量与系统状态之间的观测矩阵,vk(tk)表示测量噪声向量。
22、进一步的,步骤s3中,所述相干积分计算如下:
23、
24、其中,yi表示一个卫星信道的跟踪迭代输出的接收信号,k为t个间隔上相关信号的数量,bi为数据比特。
25、进一步的,步骤s4中,所述非相干和相干组合积分表示如下:
26、
27、其中,ycoh,m表示一个卫星信道的跟踪迭代输出的相干积分信号。
28、进一步的,步骤s5中,所述非相干和相干组合积分信号yncoh,表示如下:
29、
30、其中,im表示取虚数部分,m表示非相干和相干组合积分的积分数据量。
31、进一步的,校正过程中卡尔曼滤波增益,计算如下:
32、
33、其中,r是测量噪声向量的协方差矩阵,满足是系统的后验估计误差的均方误差矩阵由先验值,h表示观测量与系统状态之间的观测矩阵。
34、进一步的,更新的所述状态估计值,表示如下:
35、
36、其中,是系统状态的先验估计值。
37、进一步的,系统的后验估计误差的均方误差矩阵,计算如下:
38、
39、其中,i表示单位矩阵。
40、本发明的有益效果如下:
41、本发明利用卡尔曼滤波器来到得到精确的定位信息,同时通过对相干积分平方,利用非相干过程扩展接收机系统中鉴别器的积分时间有效提高了载体平台旋转时卫星导航接收机的跟踪灵敏度,对于平台旋转过程中卫星信号载噪比突然衰落、跟踪卫星数量下降情况下的接收机,仍能提供精确的定位结果。
技术特征:
1.一种基于kf的旋转平台接收机高灵敏度跟踪方法,其特征在于,方法应用于卫星导航接收机系统;
2.根据权利要求1所述的基于kf的旋转平台接收机高灵敏度跟踪方法,其特征在于,系统状态方程和系统先验估计误差的均方误差阵方程如下:
3.根据权利要求2所述的基于kf的旋转平台接收机高灵敏度跟踪方法,其特征在于,根据系统测量延时和离散化模型,所述状态转移矩阵的定义如下:
4.根据权利要求1所述的基于kf的旋转平台接收机高灵敏度跟踪方法,其特征在于,所述系统的状态向量xk(tk)和观测向量zk(tk)之间的关系如下:
5.根据权利要求1所述的基于kf的旋转平台接收机高灵敏度跟踪方法,其特征在于,步骤s3中,所述相干积分计算如下:
6.根据权利要求5所述的基于kf的旋转平台接收机高灵敏度跟踪方法,其特征在于,步骤s4中,所述非相干和相干组合积分表示如下:
7.根据权利要求6所述的基于kf的旋转平台接收机高灵敏度跟踪方法,其特征在于,步骤s5中,所述非相干和相干组合积分信号yncoh,表示如下:
8.根据权利要求1所述的基于kf的旋转平台接收机高灵敏度跟踪方法,其特征在于,校正过程中卡尔曼滤波增益,计算如下:
9.根据权利要求8所述的基于kf的旋转平台接收机高灵敏度跟踪方法,其特征在于,更新的所述状态估计值,表示如下:
10.根据权利要求9所述的基于kf的旋转平台接收机高灵敏度跟踪方法,其特征在于,系统的后验估计误差的均方误差矩阵,计算如下:
技术总结
本发明公开了一种基于KF的旋转平台接收机高灵敏度跟踪方法,应用于卫星导航接收机系统,包括:确定卡尔曼滤波预测过程中的系统状态方程和系统先验估计误差的均方误差阵方程,并确定系统的状态向量和观测向量之间的关系;计算理想状态的卫星导航接收机中跟踪环路中的锁相环的相干积分、非相干和相干组合积分和卡尔曼滤波的非相干积分信号;修改卡尔曼滤波器的系统先验估计误差的均方误差阵方程和状态转移矩阵;在卡尔曼滤波预测系统状态后,进行校正。本发明通过对相干积分平方并结合鉴相器得到了扩展的非相干积分,同时结合卡尔曼滤波获取精确定位信息,提高接收机的跟踪灵敏度。
技术研发人员:宫延云,雷浩阳,韩闯,王伶,张兆林,陶明亮,谢坚,粟嘉,汪跃先
受保护的技术使用者:西北工业大学
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!