一种获取物体轮廓信息的数据处理系统的制作方法
本发明涉及光学测量,特别是涉及一种获取物体轮廓信息的数据处理系统。
背景技术:
1、在随着科技的不断发展,利用激光感测物体成为主流手段,激光经过一系列处理照射到物体上,经过物体的发射被接收器接收,经过光电转换和信息处理后获取探测物体的相关信息 例如物体的方位、形状和轮廓等,当前,基于激光感测和三角测距原理获取物体的轮廓信息成为热门研究方向,有效设置装置能够提高获取物体的轮廓信息的准确度。
2、已知一种现有技术中,获取物体轮廓信息的方法为:发射器发射激光,激光通过透镜垂直照射到物体上,物体设置在传送带上进行移动,或移动发射器保持物体不动,照射到物体上的光束经过反射照射到接收器上,从而获取物体的轮廓信息。
3、以上所述获取物体轮廓信息的方法存在的问题:未利用平面反射镜,需移动物体或移动发射器,增加了结构的复杂度,同时,在移动发射器时降低了光束的稳定性,且在移动物体或移动发射器过程中光束保持同一角度照射物体,使得获取到的物体轮廓信息的准确度较低。
技术实现思路
1、针对上述技术问题,本发明采用的技术方案为:一种获取物体轮廓信息的数据处理系统,包括物体轮廓信息采集装置、处理器和存储有计算机程序的存储器,其中,物体轮廓信息采集装置包括发射器、第一透镜组、平面反射镜、第二透镜组和接收器,第一透镜组设置在发射器和平面反射镜之间,第二透镜组设置在待检测物体和接收器之间,当计算机程序被处理器执行时,实现以下步骤:
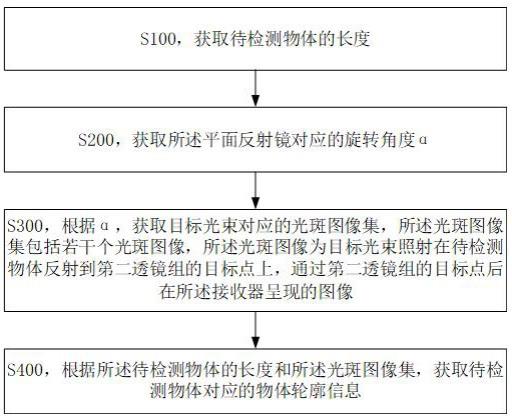
2、s100,获取待检测物体的长度,其中,待检测物体放置于预设水平面上。
3、s200,获取所述平面反射镜对应的旋转角度α,其中,所述平面反射镜的中心点与所述第二透镜组的中心点之间的连线与预设水平面平行。
4、s300,根据α,获取目标光束对应的光斑图像集,所述光斑图像集包括若干个光斑图像,光斑图像为目标光束照射在待检测物体反射到第二透镜组的目标点上,通过第二透镜组的目标点后在接收器呈现的图像,其中,目标光束为发射器发射的第一光束通过第一透镜组形成第二光束,第二光束照射到平面反射镜,经过平面反射镜进行反射获取到的光束,第一光束与预设水平面平行,第二光束经过平面反射镜的中心点。
5、s400,根据待检测物体的长度和光斑图像集,获取待检测物体对应的物体轮廓信息。
6、本发明与现有技术相比具有明显的有益效果,借由上述技术方案,本发明提供的一种获取物体轮廓信息的数据处理系统可达到相当的技术进步性及实用性,并具有产业上的广泛利用价值,其至少具有以下有益效果:
7、本发明提供了一种获取物体轮廓信息的数据处理系统,系统包括:一种获取物体轮廓信息的数据处理系统,包括物体轮廓信息采集装置、处理器和存储有计算机程序的存储器,其中,物体轮廓信息采集装置包括发射器、第一透镜组、平面反射镜、第二透镜组和接收器,第一透镜组设置在发射器和平面反射镜之间,第二透镜组设置在待检测物体和接收器之间,当计算机程序被处理器执行时,实现以下步骤:获取待检测物体的长度,获取平面反射镜对应的旋转角度,根据平面反射镜的旋转角度,获取目标光束对应的光斑图像集,光斑图像集包括若干个光斑图像,光斑图像为目标光束照射在待检测物体反射到第二透镜组的目标点上,通过第二透镜组的目标点后在接收器呈现的图像,根据待检测物体的长度和光斑图像集,获取待检测物体对应的物体轮廓信息,本发明能够利用平面反射镜,无需移动物体或移动发射器,降低了结构的复杂度,同时,未移动发射器提高了光束的稳定性,光束以不同角度照射到物体,使得获取到的物体轮廓信息的准确度较高。
8、上述说明仅是本发明技术方案的概述,为了能够更清楚了解本发明的技术手段,而可依照说明书的内容予以实施,并且为了让本发明的上述和其他目的、特征和优点能够更明显易懂,以下特举较佳实施例,并配合附图,详细说明如下。
技术特征:
1.一种获取物体轮廓信息的数据处理系统,包括物体轮廓信息采集装置、处理器和存储有计算机程序的存储器,其中,所述物体轮廓信息采集装置包括发射器(1)、第一透镜组(2)、平面反射镜(3)、第二透镜组(4)和接收器(5),所述第一透镜组(2)设置在发射器(1)和平面反射镜(3)之间,所述第二透镜组(4)设置在待检测物体(6)和接收器(5)之间,当所述计算机程序被处理器执行时,实现以下步骤:
2.根据权利要求1所述的获取物体轮廓信息的数据处理系统,其特征在于,所述平面反射镜(3)的初始位置为所述平面反射镜(3)与所述预设水平面之间的夹角为45°时的位置。
3.根据权利要求2所述的获取物体轮廓信息的数据处理系统,其特征在于,所述平面反射镜(3)对应的旋转角度为以平面反射镜(3)的初始位置为基准绕平面反射镜(3)的中心点按预设旋转方向进行旋转的角度。
4.根据权利要求3所述的获取物体轮廓信息的数据处理系统,其特征在于,所述预设旋转方向为顺时针旋转方向或逆时针旋转方向。
5.根据权利要求4所述的获取物体轮廓信息的数据处理系统,其特征在于,当所述预设旋转方向为顺时针旋转方向时,α符合如下条件:
6.根据权利要求4所述的获取物体轮廓信息的数据处理系统,其特征在于,当所述预设旋转方向为逆时针旋转方向时,α符合如下条件:
7.根据权利要求1所述的获取物体轮廓信息的数据处理系统,其特征在于,所述第一透镜组(2)为凸透镜。
8.根据权利要求1所述的获取物体轮廓信息的数据处理系统,其特征在于,所述第二透镜组(4)为成像透镜。
9.根据权利要求1所述的获取物体轮廓信息的数据处理系统,其特征在于,在s300中通过如下步骤获取光斑图像:
技术总结
本发明涉及一种获取物体轮廓信息的数据处理系统,包括:物体轮廓信息采集装置、处理器和存储有计算机程序的存储器,其中,物体轮廓信息采集装置包括发射器、第一透镜组、平面反射镜、第二透镜组和接收器,第一透镜组设置在发射器和平面反射镜之间,第二透镜组设置在待检测物体和接收器之间,当计算机程序被处理器执行时,实现以下步骤:获取待检测物体的长度,获取平面反射镜对应的目标角度,根据平面反射镜的旋转角度,获取目标光束对应的光斑图像集,根据待检测物体的长度和光斑图像集,获取待检测物体对应的物体轮廓信息,本发明能够利用平面反射镜,无需移动待检测物体且无需移动发射器,使得获取到的物体轮廓信息的准确度较高。
技术研发人员:代红林,刘楠
受保护的技术使用者:天津宜科自动化股份有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!