一种转向角传感器测量方法、系统、装置及存储介质
本发明涉及传感器,尤其涉及一种转向角传感器测量方法、系统、装置及存储介质。
背景技术:
1、随着车辆的电动化、智能化趋势的加强和车辆底盘的线控化的发展,车辆底盘对传感器精度提出更高的要求。其中,转向角是辨识驾驶员控制意图和估计车辆行驶状态的关键参数,也是车身电子稳定系统、自动驾驶辅助系统、线控转向系统等车载电子控制系统的正常工作的必要条件。其精度提高可以使线控底盘的工作更加安全可靠。
2、相关技术中,计算主齿轮转向角的方法包括:1、在两个从齿轮上装有永磁体,并通过磁传感器元件(如霍尔传感器等)测算其角度,传感器处理单元通过两个从齿轮直接测量的相位角,通过啮合关系间接测量主齿轮角度;2、通过对两个从齿轮的测量相位角差,而后乘以固定的比例系数得到主齿轮的角度,由于差分值乘以了比例系数,测量误差也被扩大了相应倍数。以上转向角测量方法存在以下问题:测量精度低、易受外界环境干扰。
技术实现思路
1、有鉴于此,本发明实施例的目的是提供一种转向角传感器测量方法、系统、装置及存储介质,能够提高测量精度和抗干扰能力。
2、第一方面,本发明实施例提供了一种转向角传感器测量方法,包括以下步骤:
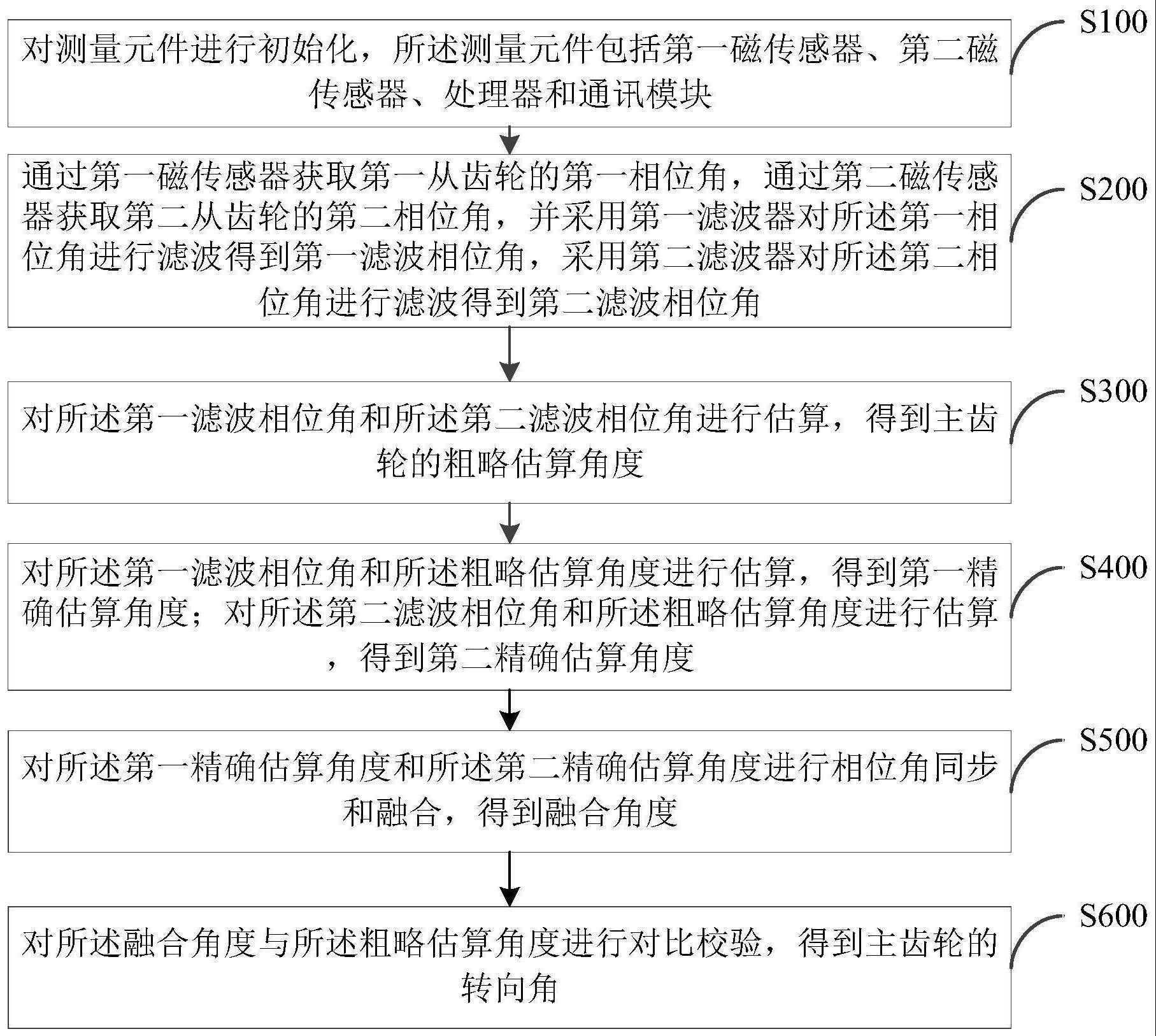
3、对测量元件进行初始化,所述测量元件包括第一磁传感器、第二磁传感器、处理器和通讯模块;
4、通过第一磁传感器获取第一从齿轮的第一相位角,通过第二磁传感器获取第二从齿轮的第二相位角,并采用第一滤波器对所述第一相位角进行滤波得到第一滤波相位角,采用第二滤波器对所述第二相位角进行滤波得到第二滤波相位角;
5、对所述第一滤波相位角和所述第二滤波相位角进行估算,得到主齿轮的粗略估算角度;
6、对所述第一滤波相位角和所述粗略估算角度进行估算,得到第一精确估算角度;对所述第二滤波相位角和所述粗略估算角度进行估算,得到第二精确估算角度;
7、对所述第一精确估算角度和所述第二精确估算角度进行相位角同步和融合,得到融合角度;
8、对所述融合角度与所述粗略估算角度进行对比校验,得到主齿轮的转向角。
9、可选地,所述第一滤波器和/或所述第二滤波器包括滞回比较滤波器,所述滞回比较滤波器如下:
10、
11、其中,x[k]为k时刻输入角度,y[k]为k时刻输出角度,bup为滞回区间上界,blow为滞回区间下界,r为滤波器的滞回区间。
12、可选地,所述滤波器的滞回区间为(0.1,1),所述滤波器的采样周期小于或等于20毫秒。
13、可选地,通过以下公式对主齿轮的粗略估算角度进行估算:
14、
15、其中,αm为主齿轮的粗略角度,αs1为第一从齿轮的第一滤波相位角,αs2为第二从齿轮的第二滤波相位角,tm为主齿轮的齿数,ts1为第一从齿轮的齿数,ts2为第二从齿轮的齿数。
16、可选地,通过以下公式计算第一精确估算角度和第二精确估算角度:
17、
18、其中,k1为第一从齿轮与主齿轮的传动比,k2为第二从齿轮与主齿轮的传动比,且αs1为第一从齿轮的第一滤波相位角,αs2为第二从齿轮的第二滤波相位角,αm1为第一精确估算角度,αm2为第二精确估算角度。
19、可选地,对所述第一精确估算角度和所述第二精确估算角度进行相位角同步和融合,得到融合角度,具体包括:
20、根据主齿轮的初始粗略估算角度和第一从齿轮的初始第一精确估算角度确定第一相位偏差;
21、根据主齿轮的初始粗略估算角度和第二从齿轮的初始第二精确估算角度确定第二相位偏差;
22、根据第一相位偏差对第一精确估算角度进行同步,根据第二相位偏差对第二精确估算角度进行同步;
23、对同步后的第一精确估算角度和同步后的第二精确估算角度进行融合,得到融合角度。
24、可选地,对所述融合角度与所述粗略估算角度进行对比校验,得到主齿轮的转向角,具体包括:
25、计算所述融合角度与所述粗略估算角度的差值;
26、若所述差值在预设范围内,将所述融合角度作为主齿轮的转向角;
27、否则,将所述粗略估算角度作为主齿轮的转向角。
28、第二方面,本发明实施例提供了一种转向角传感器测量装置,包括:
29、至少一个处理器;
30、至少一个存储器,用于存储至少一个程序;
31、当所述至少一个程序被所述至少一个处理器执行,使得所述至少一个处理器实现上述的方法。
32、第三方面,本发明实施例提供了一种存储介质,其中存储有处理器可执行的程序,所述处理器可执行的程序在由处理器执行时用于执行上述的方法。
33、第四方面,本发明实施例提供了一种转向角传感器测量系统,包括主齿轮、第一从齿轮、第二从齿轮、第一磁传感器、第二磁传感器、处理器和通讯模块,第一从齿轮和第二从齿轮分别与主齿轮啮合;其中,
34、所述第一磁传感器,用于测量所述第一从齿轮的第一相位角;
35、所述第二磁传感器,用于测量所述第二从齿轮的第二相位角;
36、所述处理器,用于实现上述的方法;
37、所述通讯模块,用于连接所述处理器与数据总线。
38、实施本发明实施例包括以下有益效果:本实施例中的转向角传感器测量方法,首先,对测量元件进行初始化,获取第一从齿轮的第一相位角、第二从齿轮的第二相位角,接着,对第一相位角和第二相位角进行滤波,根据滤波后的第一相位角和第二相位角估算主齿轮的粗略估算角度,接着,根据滤波后的第一相位角和第二相位角以及主齿轮的粗略估算角度估算第一精确估算角度和第二精确估算角度,进而,对第一精确估算角度和第二精确估算角度进行相位角同步和融合得到融合角度,最后,根据融合角度与粗略估算角度进行对比校验得到主齿轮的转向角;对获取的相位角进行滤波初步减少外部干扰,根据两个滤波后的相位角共同估算主齿轮的粗略估算角度,并根据粗略估算角度进行精算,对精算结果进行同步和融合,能有效降低因磁场扰动、温度波动、齿轮加工精度和磁传感器测量精度等造成的误差,通过对比校验确定主齿轮的转向角,进一步提高精度,从而使转向角传感器在汽车底盘复杂恶劣环境下保持稳定工作,给线控底盘的安全性提供保障。
技术特征:
1.一种转向角传感器测量方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述第一滤波器和/或所述第二滤波器包括滞回比较滤波器,所述滞回比较滤波器如下:
3.根据权利要求2所述的方法,其特征在于,所述滤波器的滞回区间为(0.1,1),所述滤波器的采样周期小于或等于20毫秒。
4.根据权利要求1所述的方法,其特征在于,通过以下公式对主齿轮的粗略估算角度进行估算:
5.根据权利要求1所述的方法,其特征在于,通过以下公式计算第一精确估算角度和第二精确估算角度:
6.根据权利要求1所述的方法,其特征在于,对所述第一精确估算角度和所述第二精确估算角度进行相位角同步和融合,得到融合角度,具体包括:
7.根据权利要求1所述的方法,其特征在于,对所述融合角度与所述粗略估算角度进行对比校验,得到主齿轮的转向角,具体包括:
8.一种转向角传感器测量装置,其特征在于,包括:
9.一种存储介质,其中存储有处理器可执行的程序,其特征在于,所述处理器可执行的程序在由处理器执行时用于执行如权利要求1-7任一项所述的方法。
10.一种转向角传感器测量系统,其特征在于,包括主齿轮、第一从齿轮、第二从齿轮、第一磁传感器、第二磁传感器、处理器和通讯模块,第一从齿轮和第二从齿轮分别与主齿轮啮合;其中,
技术总结
本发明公开了一种转向角传感器测量方法、系统、装置及存储介质,包括:获取第一从齿轮的第一相位角,获取第二从齿轮的第二相位角,并采用滤波器分别对第一相位角和第二相位角进行滤波得到第一滤波相位角和第二滤波相位角;对第一滤波相位角和第二滤波相位角进行估算,得到主齿轮的粗略估算角度;对第一滤波相位角和粗略估算角度进行估算,得到第一精确估算角度;对第二滤波相位角和粗略估算角度进行估算,得到第二精确估算角度;对第一精确估算角度和第二精确估算角度进行相位角同步和融合,得到融合角度;对融合角度与粗略估算角度进行对比校验,得到主齿轮的转向角。本发明实施例能够提高测量精度和抗干扰能力,可广泛应用于传感器技术领域。
技术研发人员:熊会元,龙志能,龙元香,冯小明,黄万义
受保护的技术使用者:中山大学
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!