基于硅光电倍增管阵列的放电弱光三维成像方法及装置
本公开属于电力设备领域,具体涉及一种基于硅光电倍增管阵列的放电弱光三维成像方法及装置。
背景技术:
1、放电光辐射是电子能级跃迁的本征现象,光特性也是放电过程最直接的外特性,通过实验获取放电发展过程中的光强、发光形态等光学信息,并结合电流等电学信息可以推求放电中光子和粒子相互影响机制,进而分析放电微观物理过程,对放电过程进行高时间分辨率的三维成像对探索放电微观机理有重要的意义。
2、随着光电探测领域全天时、远距离、暗弱目标等极限条件下成像及三维重建需求的日益增多,单光子成像技术近些年来得到了迅速发展,国内外研究人员开展了大量实验。脉冲飞行时间测距(tof)通过测量光子飞行时间,得到目标的距离信息。基于tof的三维成像被广泛应用于遥感应用,如地形测绘、环境监测、自动驾驶、机器人视觉、建筑测量等。在局部放电弱光成像方面,采用单光子探测器spad并结合时间相关单光子计数技术,可以将三维成像系统的灵敏度提高至单光子水平,被称为单光子成像技术,该技术大幅扩展测量范围,降低系统功耗,成为近年来的一个研究热点。然而,现阶段国内外所使用的基于spad的时间相关单光子计数系统,感光阵列的每个单元只能输出有光子或无光子的二元信息,获取到的信息有限,此外,强背景光噪声容易使单光子探测器饱和,并且大量的背景光计数很容易使图像信息淹没在噪点之中,严重阻碍了放电弱光成像的应用。
技术实现思路
1、针对现有技术中的不足,本公开的目的在于提供一种基于硅光电倍增管阵列的放电弱光三维成像方法,该方法通过sipm阵列,能够获取到清晰的放电弱光弱信号的三维图像,从而清晰的表示出放电弱光弱信号的放电路径。
2、为实现上述目的,本公开提供以下技术方案:
3、一种基于硅光电倍增管阵列的放电弱光三维成像方法,包括如下步骤:
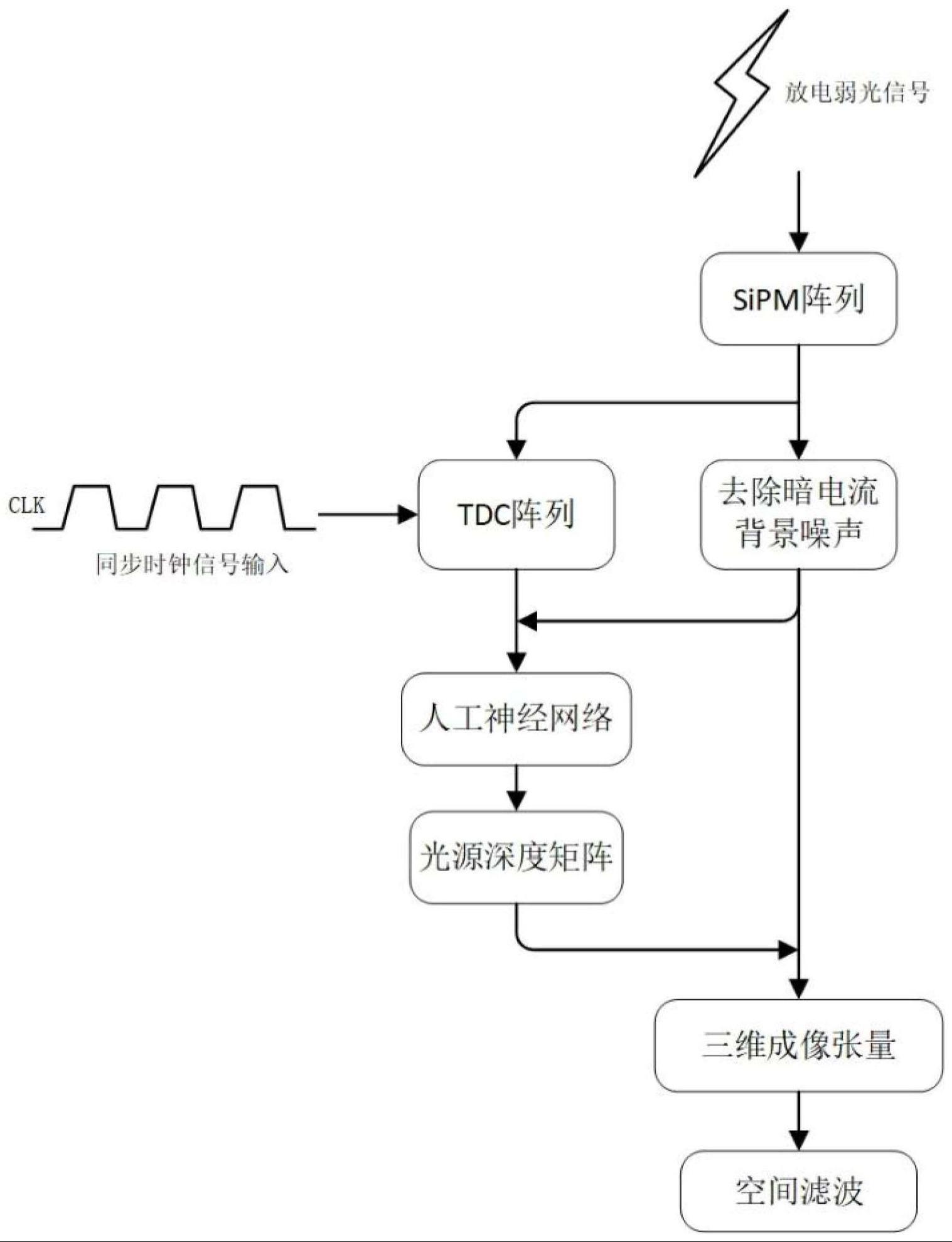
4、s100:利用硅光电倍增管阵列采集放电弱光信号;
5、s200:对所采集的放电弱光信号去噪;
6、s300:获取去噪后的放电弱光信号的电压幅值和时间差信号;
7、s400:根据所述去噪后的放电弱光信号的电压幅值和时间差信号分别获取放电弱光信号的成像矩阵un和飞行时间矩阵q;
8、s500:对所述成像矩阵un进行缩放以获得矩阵un’,对飞行时间矩阵q进行偏置消除以获得矩阵q’;
9、s600:基于所述矩阵un’、矩阵q’并通过神经网络获取放电弱光信号的光源深度矩阵d;
10、s700:基于所述光源深度矩阵d获取放电弱光信号的三维成像张量t。
11、优选的,步骤s200中,所述对所采集的放电弱光信号去噪包括如下步骤:在遮光条件下测量由硅光电倍增管阵列采集的放电弱光信号的电压值ub,并以步骤s100采集获得的放电弱光信号的电压值u减去ub。
12、优选的,步骤s300中,通过adc芯片获取去噪后的放电弱光信号的电压幅值。
13、优选的,步骤s300中,通过tdc芯片获取去噪后的放电弱光信号的时间差信号。
14、优选的,步骤s600中,所述神经网络包括双层前馈网络。
15、优选的,步骤s600中,所述神经网络包括以下训练步骤:
16、s601:初始化训练变量;
17、s602:通过前向传播计算预测值;
18、s603:计算损失函数;
19、s604:通过反向传播更新步骤s601中的初始化变量;
20、s605:重复执行步骤s601至步骤s604,直至达到指定的训练次数,即可获得训练好的神经网络。
21、优选的,步骤s700包括如下步骤:
22、s701:对光源深度矩阵d中的每个元素所对应的放电位置距离进行向下取整处理;
23、s702:基于向下取整处理后的放电位置距离获得放电弱光信号的三维成像张量t。
24、优选的,在获得放电弱光信号的三维成像张量t后,还需通过三阶张量k为卷积核对张量t进行平滑滤波。
25、本公开还提出一种放电弱光三维成像装置,包括:
26、采集模块,用于采集放电弱光信号;
27、去噪模块,用于对所采集的放电弱光信号去噪;
28、第一获取模块,用于获取去噪后的放电弱光信号的电压幅值和时间差信号;
29、第二获取模块,用于根据去噪后的放电弱光信号的电压幅值和时间差信号分别获取放电弱光信号的成像矩阵和飞行时间矩阵;
30、处理模块,用于对成像矩阵及飞行时间矩阵进行处理;
31、第三获取模块,用于基于缩放后的成像矩阵和偏置消除后的飞行时间矩阵并通过神经网络获取放电弱光信号的光源深度矩阵;
32、第四获取模块,用于基于放电弱光信号的光源深度矩阵获取放电弱光信号的三维成像张量。
33、优选的,所述处理模块包括:
34、缩放子模块,用于对成像矩阵进行缩放,以获得缩放后的成像矩阵;
35、偏置消除子模块,用于对飞行时间矩阵进行偏置消除,以获得偏置消除后的飞行时间矩阵。
36、优选的,所述第三获取模块包括:
37、训练子模块,用于对神经网络进行训练,以获得训练好的神经网络。
38、优选的,所述第四获取模块包括:
39、向下取整子模块,用于对光源深度矩阵中的每个元素所对应的放电位置距离进行向下取整处理;
40、三维成像张量获取子模块,用于基于向下取整处理后的放电位置距离获得放电弱光信号的三维成像张量。
41、本公开还提出一种计算机存储介质,包括:
42、存储器,用于存储多条计算机指令;
43、处理器,用于执行计算机指令以实现如前任一所述的方法。
44、与现有技术相比,本公开带来的有益效果为:
45、1、设计了去除背景噪声的方法,避免了sipm暗电流对成像结果的影响;
46、2、设计了tdc阵列驱动方法,可实现脉冲飞行时间差的获取;
47、3、提出了利用成像矩阵和飞行时间矩阵得到光源深度信息的方法,可实现三维成像。
技术特征:
1.一种基于硅光电倍增管阵列的放电弱光三维成像方法,其特征在于,所述方法包括如下步骤:
2.根据权利要求1所述的方法,其特征在于,优选的,步骤s200中,所述对所采集的放电弱光信号去噪包括如下步骤:在遮光条件下测量由硅光电倍增管阵列采集的放电弱光信号的电压值ub,并以步骤s100采集获得的放电弱光信号的电压值u减去ub。
3.根据权利要求1所述的方法,其特征在于,步骤s300中,通过adc芯片获取去噪后的放电弱光信号的电压幅值。
4.根据权利要求1所述的方法,其特征在于,步骤s300中,通过tdc芯片获取去噪后的放电弱光信号的时间差信号。
5.根据权利要求1所述的方法,其特征在于,步骤s600中,所述神经网络包括双层前馈网络。
6.根据权利要求1所述的方法,其特征在于,步骤s600中,所述神经网络包括以下训练步骤:
7.根据权利要求1所述的方法,其特征在于,步骤s700包括如下步骤:
8.根据权利要求7所述的方法,其特征在于,在获得放电弱光信号的三维成像张量t后,通过三阶张量k为卷积核对张量t进行平滑滤波。
9.一种放电弱光三维成像装置,包括:
10.根据权利要求9所述的装置,其特征在于,所述处理模块包括:
11.根据权利要求9所述的装置,其特征在于,所述第三获取模块包括:
12.根据权利要求9所述的装置,其特征在于,所述第四获取模块包括:
13.一种计算机存储介质,包括:
技术总结
本公开揭示了一种基于硅光电倍增管阵列的放电弱光三维成像方法,包括:S100:利用硅光电倍增管阵列采集放电弱光信号;S200:对所采集的放电弱光信号去噪;S300:获取去噪后的放电弱光信号的电压幅值和时间差信号;S400:根据所述去噪后的放电弱光信号的电压幅值和时间差信号分别获取放电弱光信号的成像矩阵U<subgt;N</subgt;和飞行时间矩阵Q;S500:对所述成像矩阵U<subgt;N</subgt;进行缩放以获得矩阵U<subgt;N</subgt;’,对飞行时间矩阵Q进行偏置消除以获得矩阵Q’;S600:基于所述矩阵U<subgt;N</subgt;’和矩阵Q’并基于神经网络获取放电弱光信号的光源深度矩阵D;S700:基于所述光源深度矩阵D获取放电弱光信号的三维成像张量T。
技术研发人员:任明,关浩斌,王玥,夏昌杰,缪金,张涛
受保护的技术使用者:西安交通大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!