可见光室内三维定位方法、装置和设备
本发明涉及可见光定位领域,尤其是指一种可见光室内三维定位方法、装置和设备。
背景技术:
1、目前,室内的活动越来越多,大众对于在室内精准定位的需求也越来越强烈,室内定位常用的方法为可见光定位。
2、可见光定位主要是通过获取室内光源发出的可见光信息进行定位计算,现有技术中常用的定位方法为指纹定位法和两步定位法;
3、其中,指纹定位法是将处理过的可见光信息与离线采集的模型数据库进行比对,获取最匹配的一处点当作定位点;两步定位法是将处理过的可见光信息通过定位模型转化为接收器与灯之间的距离,然后根据这些距离,依据几何关系进行定位。
4、但是,在实际应用时,无论是指纹定位法还是两步定位法都无法避免受到障碍物遮挡产生的阴影效应和墙壁等对光线的反射造成的影响,特别是反射在两步定位法中会对墙壁附近的定位精度产生巨大影响。
技术实现思路
1、本发明的目的是提供一种可见光室内三维定位方法、装置和设备,用于解决障碍物遮挡和墙壁反射使得可见光定位精度下降的问题。
2、为了解决上述技术问题,本发明实施例提供一种可见光室内三维定位方法,所述方法包括:
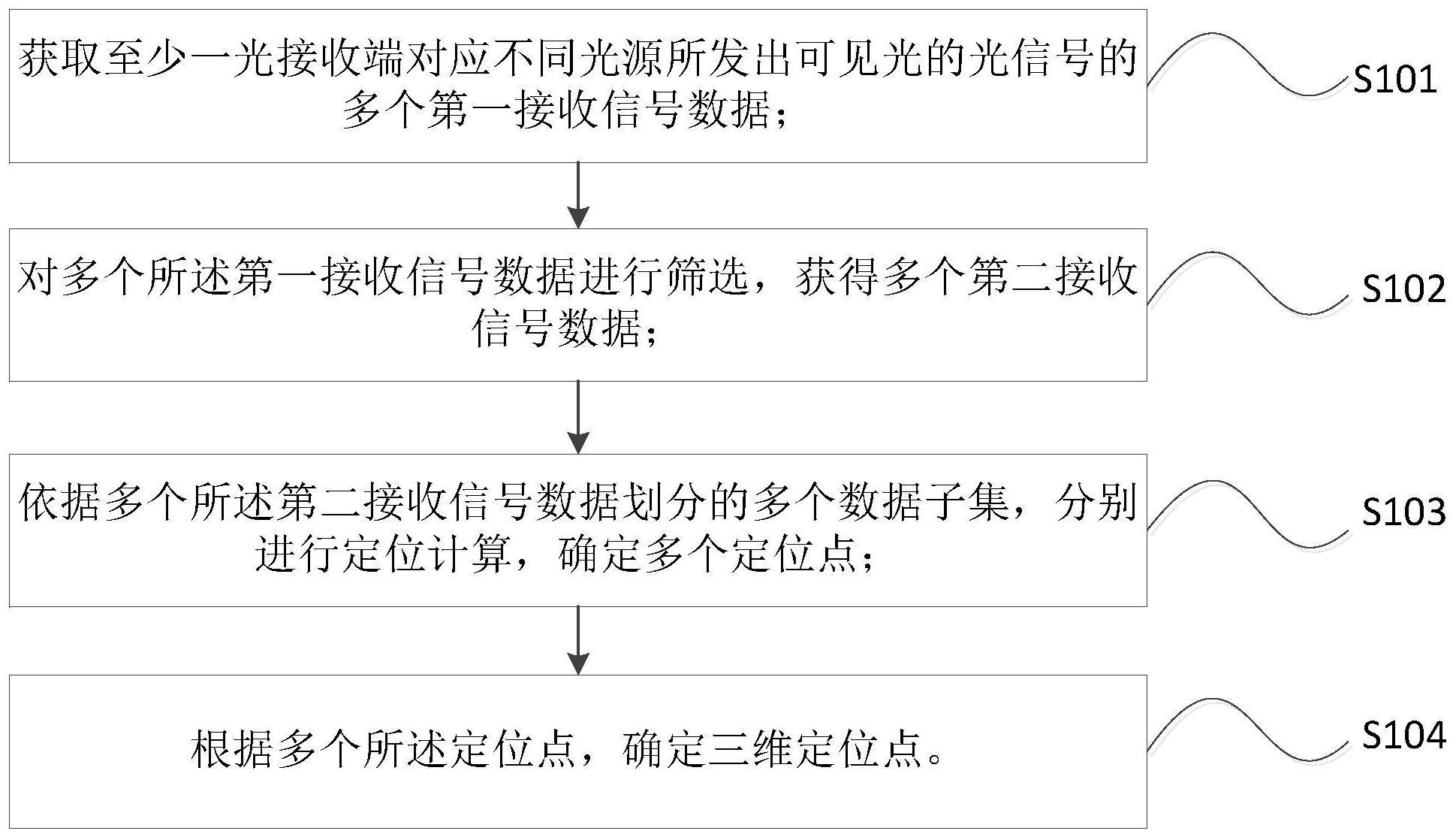
3、获取至少一光接收端对应不同光源所发出可见光的光信号的多个第一接收信号数据;
4、对多个所述第一接收信号数据进行筛选,获得多个第二接收信号数据;
5、依据多个所述第二接收信号数据划分的多个数据子集,分别进行定位计算,确定多个定位点;
6、根据多个所述定位点,确定三维定位点。
7、可选地,所述第一接收信号数据包括第一接收功率;
8、所述对多个所述第一接收信号数据进行筛选,获得多个第二接收信号数据包括:
9、将多个所述第一接收信号数据按照对应的第一接收功率由大到小排序形成第一序列;
10、对所述第一序列中的多个所述第一接收信号数据进行筛选,获得多个第二接收信号数据。
11、可选地,所述对所述第一序列中的多个所述第一接收信号数据进行筛选,获得多个第二接收信号数据,包括:
12、对所述第一序列中的多个所述第一接收功率进行累加计算,得到第二序列;其中,所述第二序列中的第n项数值是通过所述第一序列中的前n个第一接收功率累加得到的,n为大于或等于1的整数;
13、对所述第二序列中的每一项分别平方后再除以该项对应的序列号形成第三序列;
14、获取所述第三序列中的最大数值对应的第一序列号i;
15、在判断第一序列号i大于或者等于第一阈值k的情况下,确定所述第一序列中的前i个为所述第二接收信号数据;
16、在判断第一序列号i小于第一阈值k的情况下,确定所述第一序列中的前k个为所述第二接收信号数据;其中,i、k分别为大于或等于1的整数。
17、可选地,所述方法还包括:
18、将多个所述第二接收信号数据划分为多个数据子集;其中,每一个所述数据子集中均包括第一预设值个第二接收信号数据。
19、可选地,所述依据多个所述第二接收信号数据划分的多个数据子集,分别进行定位计算,确定多个定位点,包括:
20、获取多个所述数据子集分别对应的路径损耗数据;
21、通过预先获取的路径损耗模型将所述路径损耗数据转化为距离数据;
22、利用多个所述距离数据进行定位计算,确定多个定位点。
23、可选地,所述方法还包括:
24、在光学仿真平台构建可见光室内通信的仿真场景;其中,所述仿真场景中设置多个光发射端和多个光接收端;
25、获取全部所述光接收端分别对应不同所述光发射端发射的光信号的多个接收功率;
26、根据光发射端的发射功率和多个所述接收功率进行路径损耗计算,确定所述路径损耗模型。
27、可选地,所述根据多个所述定位点,确定三维定位点,包括:
28、根据预设组合方法对多个所述定位点进行组合计算,确定三维定位点;其中,所述预设组合方法包括中点法、均值法、加权法、逐层均值法和最近均值法中的一种或多种。
29、可选地,所述预设组合方法包括加权法,其中,根据加权法,对多个所述定位点进行组合计算,确定三维定位点,包括:
30、根据所述光源的数量、所述光接收端的总接收功率和每一个所述数据子集的总接收功率确定多个所述数据子集分别对应的定位点的权重值;
31、根据多个所述定位点与相对应的权重值的计算结果,得到多个第一定位点的位置坐标;
32、将多个所述第一定位点的位置坐标进行累加,确定三维定位点的位置坐标。
33、本发明实施例还提供一种可见光室内三维定位装置,所述装置包括:
34、获取模块,用于获取至少一光接收端对应不同光源所发出可见光的光信号的多个第一接收信号数据;
35、筛选模块,用于对多个所述第一接收信号数据进行筛选,获得多个第二接收信号数据;
36、分集定位模块,用于依据多个所述第二接收信号数据划分的多个数据子集,分别进行定位计算,确定多个定位点;
37、组合定位模块,用于根据多个所述定位点,确定三维定位点。
38、本发明实施例还提供一种控制设备,包括:收发机、存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序;其中,所述处理器用于读取存储器中的程序,执行如上任一项所述的可见光室内三维定位方法。
39、本发明的上述技术方案的有益效果如下:
40、上述方案中,对获取的第一接收信号数据进行筛选,去除掉不利于精准定位的第一接收信号数据,有效的减少了定位过程中障碍物遮挡和墙壁反射造成的影响,再将筛选后的第二接收信号数据进行分集与组合,进一步提高可见光室内三维定位的精度。
技术特征:
1.一种可见光室内三维定位方法,其特征在于,所述方法包括:
2.根据权利要求1所述的可见光室内三维定位方法,其特征在于,所述第一接收信号数据包括第一接收功率;
3.根据权利要求2所述的可见光室内三维定位方法,其特征在于,所述对所述第一序列中的多个所述第一接收信号数据进行筛选,获得多个第二接收信号数据,包括:
4.根据权利要求1所述的可见光室内三维定位方法,其特征在于,所述方法还包括:
5.根据权利要求1或4所述的可见光室内三维定位方法,其特征在于,所述依据多个所述第二接收信号数据划分的多个数据子集,分别进行定位计算,确定多个定位点,包括:
6.根据权利要求5所述的可见光室内三维定位方法,其特征在于,所述方法还包括:
7.根据权利要求1所述的可见光室内三维定位方法,其特征在于,所述根据多个所述定位点,确定三维定位点,包括:
8.根据权利要求7所述的可见光室内三维定位方法,其特征在于,所述预设组合方法包括加权法,其中,根据加权法,对多个所述定位点进行组合计算,确定三维定位点,包括:
9.一种可见光室内三维定位装置,其特征在于,所述装置包括:
10.一种控制设备,其特征在于,包括:收发机、存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序;其中,所述处理器用于读取存储器中的程序,执行权利要求1至8任一项所述的可见光室内三维定位方法。
技术总结
本发明提供了一种可见光室内三维定位方法、装置和设备,该方法包括:获取至少一光接收端对应不同光源所发出可见光的光信号的多个第一接收信号数据;对多个第一接收信号数据进行筛选,获得多个第二接收信号数据;依据多个第二接收信号数据划分的多个数据子集,分别进行定位计算,确定多个定位点;根据多个定位点,确定三维定位点。采用本发明提供的实施例可以对获取的第一接收信号数据进行筛选,去除掉不利于精准定位的第一接收信号数据,有效的减少了定位过程中障碍物遮挡和墙壁反射造成的影响,再将筛选后的第二接收信号数据进行分集与组合,进一步提高可见光室内三维定位的精度。
技术研发人员:张建华,李琳超,唐盼,田磊,张宇翔,于力
受保护的技术使用者:北京邮电大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!