固体颗粒向管道软体机器人密封界面迁移的模拟实验机
本发明涉及一种密封模拟实验,具体涉及一种固体颗粒向管道软体机器人密封界面迁移的模拟实验机。
背景技术:
1、全世界约30%的一次能源消耗于摩擦,约50%以上设备系统恶性事故都是起因于润滑失效与密封故障。针对全断面盾构装备、通用航空、深海装备、高端机床等的需求,为从根本上解决上述密封润滑耦合系统难题,就要系统地掌握特殊环境和复杂工况下高参数密封润滑耦合系统的密封失效机理、评价方法及控制技术。
2、用于输油管道内的软体机器人,在流体密封压差驱动的过程中,软体机器人的运动方式复杂,不仅有直线运动,还带有一定的旋转,深海立管系统软体机器人作业,从摩擦学的角度可以看作是“密封盘-管内壁-介质” 三者组成的苛刻密封摩擦系统,深海混输管道存在的高含蜡、高粘度、复杂介质等环境下(介质中含有固体颗粒),固体颗粒如何进入到密封界面加剧密封碗的磨损导致密封失效,现如今其密封问题仍是一个“黑匣子”问题,无法直接观测到复杂运动下密封界面的密封情况和密封间隙内的微观状态。因此,如何观测复杂运动下固体颗粒进入密封界面密封间隙,进而指导实际应用,是目前需要解决的技术问题。
技术实现思路
1、本发明的目的在于提供一种固体颗粒向管道软体机器人密封界面迁移的模拟实验机,本发明在软体机器人工作工况下,观测摩擦过程中固体颗粒如何进入密封界面,并利用压力传感器分析对密封界面密封性能的影响,从而对智能装备密封系统的平稳运行与摩擦学系统设计提供理论指导。
2、为解决上述技术问题,本发明所采用的技术方案是:
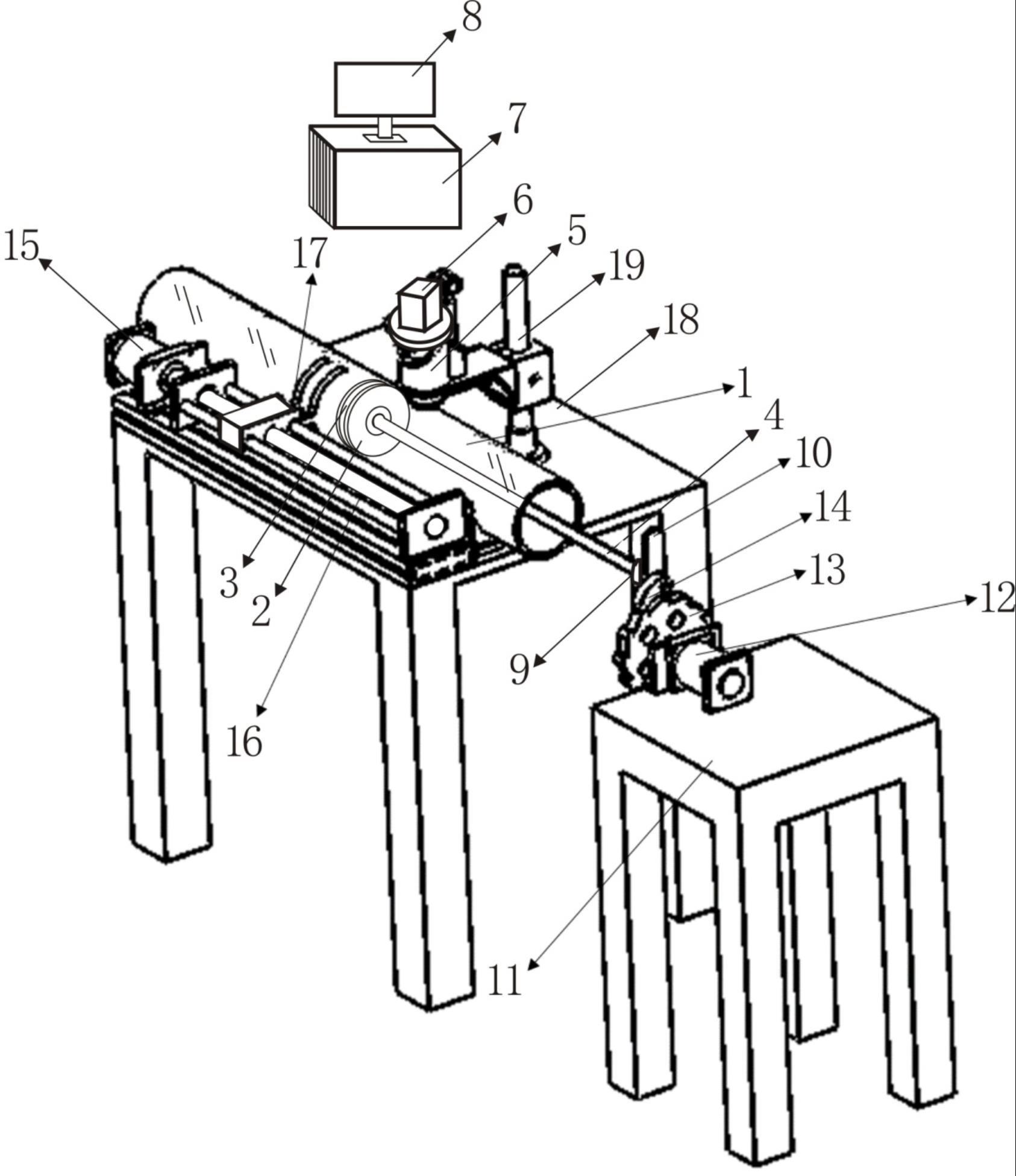
3、固体颗粒向管道软体机器人密封界面迁移的模拟实验机,包括透明管、直线驱动装置、旋转驱动装置、管道软体机器人活塞体、智能密封圈、传动轴、荧光显微镜、图像采集器、处理器和显示器,所述透明管内设有多相介质,多相介质中含有固体荧光染料颗粒,用以模拟深海油气混输管道;所述传动轴安装在轴承座上,管道软体机器人活塞体安装在传动轴的一端且位于透明管内,传动轴的另一端与旋转驱动装置联接,旋转驱动装置用以驱动管道软体机器人活塞体转动,直线驱动装置用以使管道软体机器人活塞体与透明管作相对直线运动;智能密封圈设在管道软体机器人活塞体的圆周面上,所述智能密封圈用以将密封圈与透明管管壁之间的压力传送给处理器,图像采集器通过荧光显微镜获取透明管内的固体荧光染料颗粒位置状态信息,并将位置状态信息传送给处理器,所述处理器,通过位置状态信息得到固体荧光染料颗粒迁移规律并与收到的压力数据相结合,处理后传送给显示器。
4、进一步地,所述透明管采用的是玻璃管。
5、进一步地,所述直线驱动装置包括电机、丝杠滑块机构和夹具,电机的输出轴与丝杠滑块机构中的丝杠联接,丝杠滑块机构中的滑块上固定连接有所述的夹具,所述的夹具用以将透明管夹持固定;所述电机驱动丝杠滑块机构上的滑块,滑块通过夹具带动透明管作直线运动。
6、进一步地,所述直线驱动装置设在工作台上,工作台上且位于透明管的一侧设有支架,所述支架上设有所述的荧光显微镜和图像采集器。
7、进一步地,所述轴承座安装在支撑板上,所述支撑板固定在底座上。
8、进一步地,所述旋转驱动装置,包括变频电机、棘轮、棘爪和复位弹簧,变频电机设在底座上,棘轮安装在变频电机的输出轴上,棘爪一端固定在传动轴上,棘爪的另一端与棘轮相啮合;复位弹簧用以使棘爪复位;在棘轮和复位弹簧的作用下,棘爪带动传动轴往复转动,传动轴带动管道软体机器人活塞体往复转动。
9、进一步地,所述智能密封圈,包括密封圈主体和弹性蓄能金属体,密封圈主体上设有一圈环形蓄能槽,所述环形蓄能槽位于密封圈主体的端面上,在环形蓄能槽的两侧槽壁的平面上覆盖有pi薄膜,在两侧槽壁的pi薄膜表面分别覆盖有正极导电薄膜和负极导电薄膜,所述正极导电薄膜和负极导电薄膜构成了柔性电容式压力传感器,所述弹性蓄能金属体设在环形蓄能槽内,所述的弹性蓄能金属体的外表面设有电绝缘层。
10、进一步地,所述正极导电薄膜的一端和负极导电薄膜的一端分别涂有粘接层,所述粘接层用以粘接与正极导电薄膜和负极导电薄膜电连接的数据线。
11、进一步地,所述弹性蓄能金属体为o形蓄能金属弹片,材料为inconel718。
12、进一步地,所述密封圈主体采用的材料为聚四氟乙烯(ptfe);所述正极导电薄膜和负极导电薄膜的材料为铜。
13、本发明的有益效果在于:
14、本发明可进行模拟软体机器人柔软密封碗与管壁的摩擦过程,并利用荧光显微镜进行多项介质下微颗粒在密封界面的迁移行为,得到颗粒迁移规律,并利用压力传感器检测密封面的接触压力,得到多相介质下颗粒固体迁移对密封界面的影响,从而对智能装备密封系统的平稳运行与摩擦学系统设计提供理论指导;
15、本发明尤其是将要观察的固体颗粒进行荧光染料,并与荧光显微镜相结合,大大提高了固体颗粒迁移图像的清晰度,为分析评价奠定了基础;
16、本专利采用了智能密封圈,本专利智能密封圈运用了智能传感技术,能将密封件的压力信息进行适时传送,为实时对密封件密封性能可靠性进行定量评价奠定了基础。
技术特征:
1.一种固体颗粒向管道软体机器人密封界面迁移的模拟实验机,其特征在于:包括透明管、直线驱动装置、旋转驱动装置、管道软体机器人活塞体、智能密封圈、传动轴、荧光显微镜、图像采集器、处理器和显示器,所述透明管内设有多相介质,多相介质中含有固体荧光染料颗粒,用以模拟深海油气混输管道;所述传动轴安装在轴承座上,管道软体机器人活塞体安装在传动轴的一端且位于透明管内,传动轴的另一端与旋转驱动装置联接,旋转驱动装置用以驱动管道软体机器人活塞体转动,直线驱动装置用以使管道软体机器人活塞体与透明管作相对直线运动;智能密封圈设在管道软体机器人活塞体的圆周面上,所述智能密封圈用以将密封圈与透明管管壁之间的压力传送给处理器,图像采集器通过荧光显微镜获取透明管内的固体荧光染料颗粒位置状态信息,并将位置状态信息传送给处理器,所述处理器,通过位置状态信息得到固体荧光染料颗粒迁移规律并与收到的压力数据相结合,处理后传送给显示器。
2.根据权利要求1所述的固体颗粒向管道软体机器人密封界面迁移的模拟实验机,其特征在于:所述透明管采用的是玻璃管。
3.根据权利要求1所述的固体颗粒向管道软体机器人密封界面迁移的模拟实验机,其特征在于:所述直线驱动装置包括电机、丝杠滑块机构和夹具,电机的输出轴与丝杠滑块机构中的丝杠联接,丝杠滑块机构中的滑块上固定连接有所述的夹具,所述的夹具用以将透明管夹持固定;所述电机驱动丝杠滑块机构上的滑块,滑块通过夹具带动透明管作直线运动。
4.根据权利要求3所述的固体颗粒向管道软体机器人密封界面迁移的模拟实验机,其特征在于:所述直线驱动装置设在工作台上,工作台上且位于透明管的一侧设有支架,所述支架上设有所述的荧光显微镜和图像采集器。
5.根据权利要求4所述的固体颗粒向管道软体机器人密封界面迁移的模拟实验机,其特征在于:所述轴承座安装在支撑板上,所述支撑板固定在底座上。
6.根据权利要求5所述的固体颗粒向管道软体机器人密封界面迁移的模拟实验机,其特征在于:所述旋转驱动装置,包括变频电机、棘轮、棘爪和复位弹簧,变频电机设在底座上,棘轮安装在变频电机的输出轴上,棘爪一端固定在传动轴上,棘爪的另一端与棘轮相啮合;复位弹簧用以使棘爪复位;在棘轮和复位弹簧的作用下,棘爪带动传动轴往复转动,传动轴带动管道软体机器人活塞体往复转动。
7.根据权利要求1所述的固体颗粒向管道软体机器人密封界面迁移的模拟实验机,其特征在于:所述智能密封圈,包括密封圈主体和弹性蓄能金属体,密封圈主体上设有一圈环形蓄能槽,所述环形蓄能槽位于密封圈主体的端面上,在环形蓄能槽的两侧槽壁的平面上覆盖有pi薄膜,在两侧槽壁的pi薄膜表面分别覆盖有正极导电薄膜和负极导电薄膜,所述正极导电薄膜和负极导电薄膜构成了柔性电容式压力传感器,所述弹性蓄能金属体设在环形蓄能槽内,所述的弹性蓄能金属体的外表面设有电绝缘层。
8.根据权利要求7所述的固体颗粒向管道软体机器人密封界面迁移的模拟实验机,其特征在于:所述正极导电薄膜的一端和负极导电薄膜的一端分别涂有粘接层,所述粘接层用以粘接与正极导电薄膜和负极导电薄膜电连接的数据线。
9.根据权利要求8所述的固体颗粒向管道软体机器人密封界面迁移的模拟实验机,其特征在于:所述弹性蓄能金属体为o形蓄能金属弹片,材料为inconel718。
10.根据权利要求9所述的固体颗粒向管道软体机器人密封界面迁移的模拟实验机,其特征在于:所述正极导电薄膜和负极导电薄膜的材料为铜;所述密封圈主体采用的材料为聚四氟乙烯(ptfe)。
技术总结
本发明公开了一种固体颗粒向管道软体机器人密封界面迁移的模拟实验机,包括透明管、直线驱动装置、旋转驱动装置、管道软体机器人活塞体、智能密封圈、传动轴、荧光显微镜、图像采集器、处理器和显示器,所述智能密封圈压力信息传送给处理器,图像采集器通过荧光显微镜获取透明管内的固体荧光染料颗粒位置状态信息,并将位置状态信息传送给处理器。本发明利用荧光显微镜进行多项介质下微颗粒在密封界面的迁移行为,得到颗粒迁移规律,并利用压力传感器检测密封面的接触压力,得到多相介质下颗粒固体迁移对密封界面的影响,从而对智能装备密封系统的平稳运行与摩擦学系统设计提供理论指导。
技术研发人员:谭桂斌,纪逸凡,张永康,李顺利,黄兴
受保护的技术使用者:广东工业大学
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!