一种陀螺仪校正装置及校正方法与流程
本发明涉及光学陀螺,尤其涉及一种陀螺仪校正装置及校正方法。
背景技术:
1、目前所报道的光纤陀螺仪通过增加光纤长度和光纤环圈直径提高陀螺的精度,一般采用长光纤大尺寸光纤环圈设计,然而当光纤陀螺采用长光纤大直径设计时,陀螺仪的最大测量范围将线性的降低。
2、目前,光纤陀螺仪基于萨格纳克(sagnac)效应,在相对惯性空间转动的闭环光路中所传播光的一种相关效应,即在同一闭合光路中从同一光源发出的两束特征相等的光,以相反的方向进行传播,最后汇合到同一探测点。在相对惯性空间转动中会产生相位偏转引起相位差,输出数据不准确,导致转动条件下陀螺仪启动输出跨条纹异常问题。
技术实现思路
1、本发明实施例提供了一种陀螺仪校正装置及校正方法,通过对启动时短时间内敏感信号动态检测及反馈信号变化进行初判,结合陀螺输出对陀仪螺闭环及输出数据进行修订,确保输出数据准确性,采用该方法可以实现任意角速率输入条件下陀螺准确输出敏感信息,避免转动条件下光纤陀螺启动输出跨条纹异常问题。
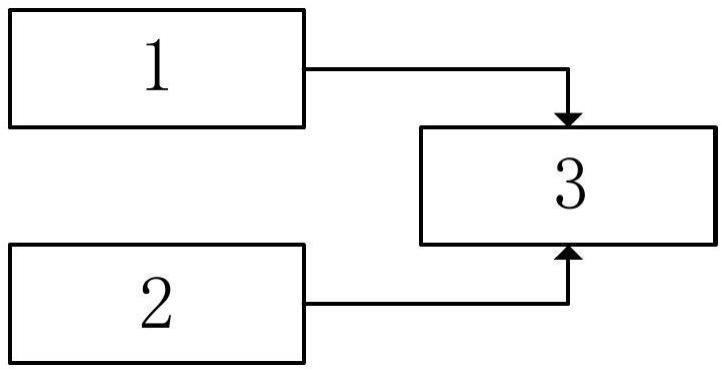
2、根据本发明的一方面,提供了一种陀螺仪校正装置,具体包括第一陀螺仪、第二陀螺仪和校正模块,第一陀螺仪和第二陀螺仪均与校正模块连接,第一陀螺仪的测量精度小于第二陀螺仪的测量精度;
3、在第二陀螺仪的启动阶段,第一陀螺仪获取当前角速度输入量,校正模块根据第一陀螺仪的输出数据将第二陀螺仪的输出信号修正至负反馈的陀螺闭环空间。
4、可选地,第一陀螺仪包括微机电系统陀螺仪,第二陀螺仪包括光纤陀螺仪。
5、可选地,校正模块根据第一陀螺仪的输出数据,判断光纤陀螺仪的启动转速是否在一个条纹工作范围内,并根据判定结果将光纤陀螺仪的输出信号修正至负反馈的陀螺闭环空间。
6、可选地,若校正模块判定光纤陀螺仪的启动转速在一个条纹工作范围内,校正模块直接根据第一陀螺仪的输出数据和第二陀螺仪的解调数据校正光纤陀螺仪。
7、可选地,若校正模块判定光纤陀螺仪的启动转速在第p个条纹工作范围内,校正模块先根据跨条纹数量进行数据移位,再校正光纤陀螺仪,其中p为大于或等于2的整数。
8、可选地,光纤陀螺仪包括光学传感头、光电转换模块和解算及调制反馈模块;
9、光学传感头用于响应待测敏感信号;
10、光电转换模块用于将光学传感头的光信号转换为电信号;
11、解算及调制反馈模块用于根据电信号解调待测敏感信号并给光学传感头提供反馈,输出测量结果。
12、可选地,解算及调制反馈模块包括积分单元、解调单元、数据分析单元、综合研判单元和控制输出单元,校正模块包括数据采集单元、分析处理单元和数据判决单元,光纤陀螺仪的校正过程包括:
13、设定第n个解调周期时积分单元的积分数据为in,同时刻解调单元的解调数据为mn,光纤陀螺仪启动时刻各环节的数据均初始化为0, i1=0,m1=0;
14、数据分析单元读取解调单元的解调数据,记录解调数据mq+1及解调数据的差分数据mq+1-mq,同时记录积分单元的积分数据iq+1,将数据的方向和大小送入综合研判单元;
15、数据采集单元读取的微机电系统陀螺仪信息送到分析处理单元,分析出输入转速及方向,分析结果输出到数据判决单元进行判定,通过转速信息给出光纤陀螺仪处于第几个条纹工作,转向信息给出判定信息,指出陀螺解调数据和积分数据是否满足闭环工作条件;
16、综合研判单元根据数据分析单元和数据判决单元给出的结果进行分析判断,控制输出单元给出校正指令及修正数据对积分数据进行调整;
17、其中,n为自然数,q为大于或等于4的整数。
18、可选地,光学传感头包括光源、耦合器、y型波导和光纤环圈;
19、光源的输出端与耦合器的第一端连接,耦合器的第二端与y型波导的第一端连接,耦合器的第三端与光电转换模块连接,y型波导与光纤环圈连接。
20、可选地,光纤环圈的光纤长度大于或等于5km,直径大于或等于150mm。
21、根据本发明的另一方面,提供了一种陀螺仪校正方法,利用上述的陀螺仪校正装置执行,陀螺仪校正方法包括:
22、在第二陀螺仪的启动阶段,第一陀螺仪获取当前角速度输入量;
23、校正模块根据第一陀螺仪的输出数据将第二陀螺仪的输出信号修正至负反馈的陀螺闭环空间。
24、本发明实施例提供的一种陀螺仪校正装置及校正方法,具体包括第一陀螺仪、第二陀螺仪和校正模块,第一陀螺仪和第二陀螺仪均与校正模块连接,第一陀螺仪的测量精度小于第二陀螺仪的测量精度;在第二陀螺仪的启动阶段,第一陀螺仪获取当前角速度输入量,校正模块根据第一陀螺仪的输出数据将第二陀螺仪的输出信号修正至负反馈的陀螺闭环空间。通过对陀螺解算输出信号、解调信号及其差分信息进行分析,同时结合低精度的第一陀螺仪(不存在条纹限制)输出数据对陀螺闭环进行校正、补偿控制,提升陀螺仪启动的准确性和可靠性,从而实现陀螺仪有转速输入时的可靠启动。
25、应当理解,本部分所描述的内容并非旨在标识本发明的实施例的关键或重要特征,也不用于限制本发明的范围。本发明的其它特征将通过以下的说明书而变得容易理解。
技术特征:
1.一种陀螺仪校正装置,其特征在于,包括第一陀螺仪、第二陀螺仪和校正模块,所述第一陀螺仪和所述第二陀螺仪均与所述校正模块连接,所述第一陀螺仪的测量精度小于所述第二陀螺仪的测量精度;
2.根据权利要求1所述的陀螺仪校正装置,其特征在于,所述第一陀螺仪包括微机电系统陀螺仪,所述第二陀螺仪包括光纤陀螺仪。
3.根据权利要求2所述的陀螺仪校正装置,其特征在于,所述校正模块根据所述第一陀螺仪的输出数据,判断所述光纤陀螺仪的启动转速是否在一个条纹工作范围内,并根据判定结果将所述光纤陀螺仪的输出信号修正至负反馈的陀螺闭环空间。
4.根据权利要求3所述的陀螺仪校正装置,其特征在于,若所述校正模块判定所述光纤陀螺仪的启动转速在一个条纹工作范围内,所述校正模块直接根据所述第一陀螺仪的输出数据和所述第二陀螺仪的解调数据校正所述光纤陀螺仪。
5.根据权利要求3所述的陀螺仪校正装置,其特征在于,若所述校正模块判定所述光纤陀螺仪的启动转速在第p个条纹工作范围内,所述校正模块先根据跨条纹数量进行数据移位,再校正所述光纤陀螺仪,其中p为大于或等于2的整数。
6.根据权利要求2所述的陀螺仪校正装置,其特征在于,所述光纤陀螺仪包括光学传感头、光电转换模块和解算及调制反馈模块;
7.根据权利要求6所述的陀螺仪校正装置,其特征在于,所述解算及调制反馈模块包括积分单元、解调单元、数据分析单元、综合研判单元和控制输出单元,所述校正模块包括数据采集单元、分析处理单元和数据判决单元,所述光纤陀螺仪的校正过程包括:
8.根据权利要求6所述的陀螺仪校正装置,其特征在于,所述光学传感头包括光源、耦合器、y型波导和光纤环圈;
9.根据权利要求8所述的陀螺仪校正装置,其特征在于,所述光纤环圈的光纤长度大于或等于5km,直径大于或等于150mm。
10.一种陀螺仪校正方法,其特征在于,利用权利要求1-9任一所述的陀螺仪校正装置执行,所述陀螺仪校正方法包括:
技术总结
本发明实施例公开了一种陀螺仪校正装置及校正方法,具体包括第一陀螺仪、第二陀螺仪和校正模块,第一陀螺仪和第二陀螺仪均与校正模块连接,第一陀螺仪的测量精度小于第二陀螺仪的测量精度;在第二陀螺仪的启动阶段,第一陀螺仪获取当前角速度输入量,校正模块根据第一陀螺仪的输出数据将第二陀螺仪的输出信号修正至负反馈的陀螺闭环空间。通过对启动时短时间内敏感信号动态检测及反馈信号变化进行初判,结合陀螺仪输出对陀螺仪闭环及输出数据进行修订,确保输出数据准确性,避免转动条件下陀螺仪启动输出跨条纹异常问题。
技术研发人员:颜苗,郑志胜,罗巍,左文龙,杨正,林毅
受保护的技术使用者:中国船舶集团有限公司第七〇七研究所
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!