飞行时间相机和深度图像获取方法与流程
本申请涉及图像采集领域,尤其涉及一种飞行时间相机和一种深度图像获取方法。
背景技术:
1、现有的飞行时间相机,通常是向待探测物体发射固定频率的探测光,并感测探测光被待探测物体反射回相机所需的时间,从而计算出深度信息。然而,飞行时间相机在接收反射的探测光的同时通常还会接收到外界光线照射到待探测物体之后反射的杂散光,导致得到的深度图像会出现误差。
技术实现思路
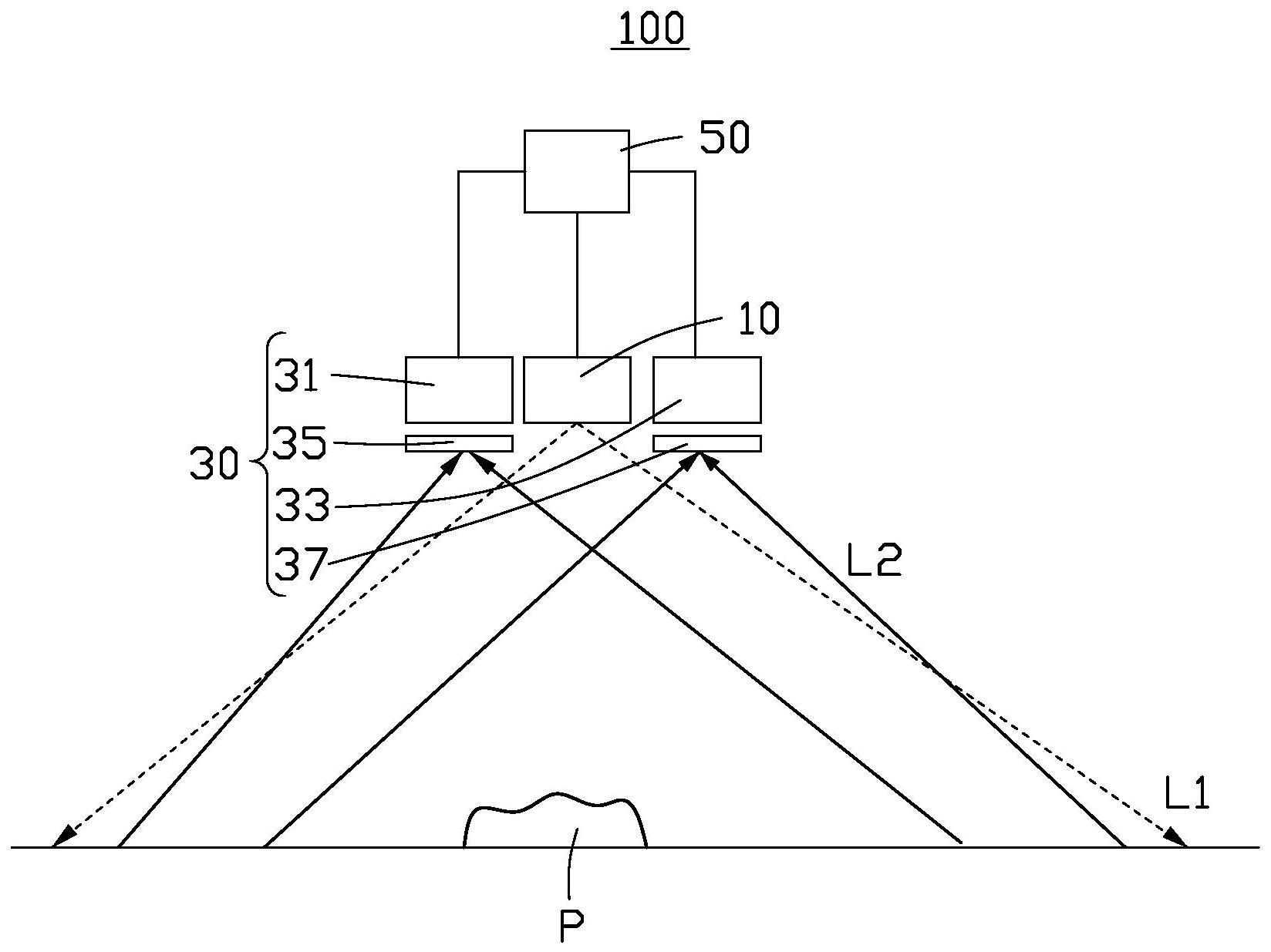
1、本申请一方面提供一种飞行时间相机,包括:
2、光发射部,用于向待探测物体出射探测光;
3、光接收部,包括间隔设置的第一接收端和第二接收端,所述第一接收端和所述第二接收端用于从不同的位置分别接收被所述待探测物体反射的反射光;以及
4、处理器,所述处理器与所述光接收部电连接,用于将所述第一接收端和所述第二接收端接收的所述反射光合成为深度图像;
5、其中,所述光接收部还包括第一偏振片和第二偏振片,所述第一偏振片设置于所述第一接收端用于接收所述反射光的一侧,所述第二偏振片设置于所述第二接收端用于接收所述反射光的一侧,所述第一偏振片的偏振方向和所述第二偏振片的偏振方向相互正交。
6、本申请实施例提供的飞行时间相机,通过设置偏振方向相互正交的第一偏振片和第二偏振片,使得第一接收端和第二接收端接收的反射光的偏振方向相互正交,因此通过比对第一接收端和第二接收端接收的反射光,可以识别并滤除反射光中混入的外界环境的杂散光,从而提高深度图像的准确性。
7、在一实施例中,所述第一接收端和所述第二接收端分别设置于所述光发射部的两侧。
8、在一实施例中,所述处理器包括转换模块,用于将所述反射光的信号转换为图像信号,所述图像信号包括亮度信息和深度信息,所述转换模块还用于将所述第一接收端接收的所述反射光转换为第一图像,并将所述第二接收端接收的所述反射光转换为第二图像。
9、在一实施例中,所述反射光包括外界环境的杂散光,所述处理器还包括比对分解模块,用于比对所述第一图像和所述第二图像的所述亮度信息,以用于筛选出所述第一图像和所述第二图像中所述杂散光对应的深度信息。
10、在一实施例中,所述转换模块还用于将所述反射光的信号转换为相位影像,并用于将所述第一接收端和所述第二接收端转换的所述相位影像合成为补偿影像;所述处理器还包括补偿模块,用于根据所述补偿影像补偿所述深度图像中所述待探测物体的轮廓。
11、本申请另一方面提供一种深度图像获取方法,包括:
12、向待探测物体出射探测光;
13、在第一位置接收被所述待探测物体反射的反射光,并将所述反射光转换为第一偏振光;
14、在第二位置接收被所述待探测物体反射的反射光,并将所述反射光转换为第二偏振光;
15、将所述第一偏振光与所述第二偏振光转换为深度图像;
16、其中,所述第一偏振光的偏振方向与所述第二偏振光的偏振方向相互正交,将所述第一偏振光与所述第二偏振光转换为深度图像的步骤包括识别并滤除所述第一偏振光和所述第二偏振光中外界环境的杂散光。
17、本申请实施例提供的深度图像获取方法,通过将反射光分别转换为偏振方向相互正交的第一偏振光和第二偏振光,有利于通过比对第一偏振光和第二偏振光,从而滤除反射光中的杂散光,提高深度图像的准确度。
18、在一实施例中,将所述第一偏振光与所述第二偏振光转换为深度图像的步骤具体包括:
19、将所述第一偏振光转换为第一图像;
20、将所述第二偏振光转换为第二图像;
21、滤除所述第一图像和所述第二图像中外界环境的杂散光;
22、将所述第一图像和所述第二图像合并为所述深度图像;
23、其中,所述第一图像和所述第二图像包括相位、亮度与深度信息。
24、在一实施例中,滤除所述第一图像和所述第二图像中外界环境的杂散光的步骤具体包括:比对所述第一图像和所述第二图像的亮度信息,以筛选出所述第一图像和所述第二图像中所述杂散光对应的深度信息。
25、在一实施例中,将所述第一图像和所述第二图像合并为所述深度图像的步骤还包括:减少或消除所述第一图像和所述第二图像中所述杂散光对应的深度信息,并将所述第一图像中所述待探测物体的深度信息与所述第二图像上对应位置的深度信息结合,并合并为所述深度图像。
26、在一实施例中,所述深度图像获取方法还包括:在所述第一位置和所述第二位置分别将所述反射光转换为相位影像,并根据所述相位影像合成补偿影像;根据所述补偿影像补偿所述深度图像。
技术特征:
1.一种飞行时间相机,其特征在于,包括:
2.如权利要求1所述的飞行时间相机,其特征在于,所述第一接收端和所述第二接收端分别设置于所述光发射部的两侧。
3.如权利要求1所述的飞行时间相机,其特征在于,所述处理器包括转换模块,用于将所述反射光的信号转换为图像信号,所述图像信号包括亮度信息和深度信息,所述转换模块还用于将所述第一接收端接收的所述反射光转换为第一图像,并将所述第二接收端接收的所述反射光转换为第二图像。
4.如权利要求3所述的飞行时间相机,其特征在于,所述反射光包括外界环境的杂散光,所述处理器还包括比对分解模块,用于比对所述第一图像和所述第二图像的所述亮度信息,以用于筛选出所述第一图像和所述第二图像中所述杂散光对应的深度信息。
5.如权利要求3所述的飞行时间相机,其特征在于,所述转换模块还用于将所述反射光的信号转换为相位影像,并用于将所述第一接收端和所述第二接收端转换的所述相位影像合成为补偿影像;所述处理器还包括补偿模块,用于根据所述补偿影像补偿所述深度图像中所述待探测物体的轮廓。
6.一种深度图像获取方法,其特征在于,包括:
7.如权利要求6所述的深度图像获取方法,其特征在于,将所述第一偏振光与所述第二偏振光转换为深度图像的步骤具体包括:
8.如权利要求7所述的深度图像获取方法,其特征在于,滤除所述第一图像和所述第二图像中外界环境的杂散光的步骤具体包括:比对所述第一图像和所述第二图像的亮度信息,以筛选出所述第一图像和所述第二图像中所述杂散光对应的深度信息。
9.如权利要求8所述的深度图像获取方法,其特征在于,将所述第一图像和所述第二图像合并为所述深度图像的步骤还包括:减少或消除所述第一图像和所述第二图像中所述杂散光对应的深度信息,并将所述第一图像中所述待探测物体的深度信息与所述第二图像上对应位置的深度信息结合,并合并为所述深度图像。
10.如权利要求6所述的深度图像获取方法,其特征在于,将所述第一图像和所述第二图像合并为所述深度图像之后,还包括:在所述第一位置和所述第二位置分别将所述反射光转换为相位影像,并根据所述相位影像合成补偿影像;根据所述补偿影像补偿所述深度图像。
技术总结
本申请提供一种飞行时间相机,包括:光发射部,用于向待探测物体出射探测光;光接收部,包括间隔设置的第一接收端和第二接收端,所述第一接收端和所述第二接收端用于从不同的位置分别接收被所述待探测物体反射的反射光;以及处理器,所述处理器与所述光接收部电连接,用于将所述第一接收端和所述第二接收端接收的所述反射光合成为深度图像;其中,所述光接收部还包括第一偏振片和第二偏振片,所述第一偏振片设置于所述第一接收端用于接收所述反射光的一侧,所述第二偏振片设置于所述第二接收端用于接收所述反射光的一侧,所述第一偏振片的偏振方向和所述第二偏振片的偏振方向相互正交。本申请还提供一种深度图像获取方法。
技术研发人员:张瑞轩,施正远
受保护的技术使用者:信扬科技(佛山)有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!