固态激光雷达与摄像头同步工作系统及方法与流程
本发明涉及无人驾驶,更具体地涉及一种固态激光雷达与摄像头同步工作系统及方法。
背景技术:
1、传统的激光雷达可通过零部件旋转对周围视场进行扫描,从而获得点云信息,具有可靠的距离、深度特征,且在弱光条件下具有更好的性能,但是基于单一的激光雷达的系统对于细致物体的分类仍显不足。摄像头可被动式地获得对象的图像色彩信息,其更擅长目标识别、内容识别等任务,但是测距却是它的短板。无人驾驶需要面临复杂的路况场景,若能将激光雷达获得的点云信息以及摄像头获得的图像信息融合,可以提高系统的整体感知能力。
2、现有技术中,采用旋转式或扫描式的激光雷达与摄像头安装在同一车辆上,先通过激光雷达和摄像头分别采集点云数据和图像数据,然后再通过后期参数标定,使点云数据和图像数据进行融合。
3、但是,现有技术中,激光雷达为旋转式或扫描式雷达,其占用空间较大,且与摄像头的工作原理和帧率不同,导致激光雷达和摄像头的数据配准不理想,也无法做到逐帧数据融合;现有的激光雷达与摄像头为两个独立的传感器,无法做到严格的时间同步,导致数据融合时容易出现时间误差。
技术实现思路
1、本发明的目的在于提供一种固态激光雷达与摄像头同步工作系统及方法,采用固态激光雷达采集点云数据,其占用空间小,且可实现与摄像头的精确配准和同步采集,从而获得丰富的场景信息。
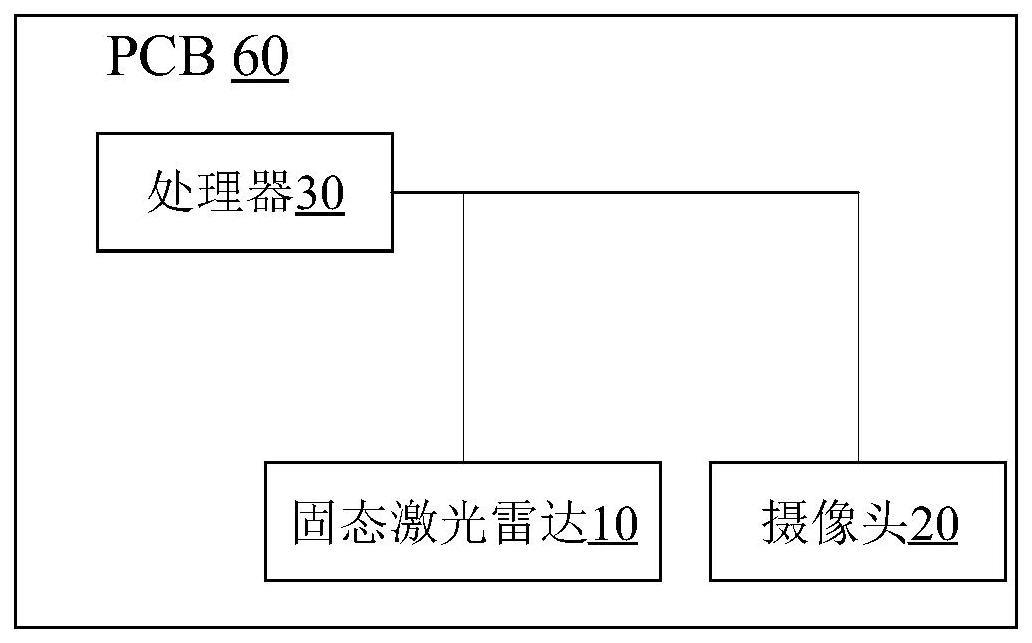
2、基于上述目的,本发明一方面提供一种固态激光雷达与摄像头同步工作系统,包括固态激光雷达、摄像头和处理器,所述固态激光雷达和所述摄像头均与所述处理器电连接。
3、进一步地,所述处理器设置为同步接收所述固态激光雷达采集的点云数据和所述摄像头采集的图像数据。
4、进一步地,所述固态激光雷达、所述摄像头和所述处理器设置在同一pcb上。
5、进一步地,所述固态激光雷达和所述摄像头的扫描方式相同。
6、进一步地,所述固态激光雷达和所述摄像头的扫描方式均为按行扫描、按列扫描或按块扫描。
7、进一步地,所述激光雷达和所述摄像头的帧率相同。
8、本发明另一方面提供一种固态激光雷达与摄像头同步工作方法,包括:
9、提供一种固态激光雷达与摄像头同步工作系统,包括固态激光雷达、摄像头和处理器,所述固态激光雷达和所述摄像头均与所述处理器电连接;
10、所述处理器控制所述固态激光雷达和所述摄像头以同样的扫描方式和扫描速度对预设的扫描区域进行同步扫描,并分别得到点云数据和图像数据;
11、所述固态激光雷达和所述摄像头分别将所述点云数据和所述图像数据同步传输至所述处理器,以使所述处理器将所述点云数据和所述图像数据融合,得到扫描区域的融合数据。
12、进一步地,在对预设的扫描区域进行同步扫描时,所述固态激光雷达和所述摄像头均采用按行扫描、按列扫描或按块扫描的方式。
13、进一步地,当所述固态激光雷达和所述摄像头均采用按行扫描或按列扫描的方式时,对扫描区域进行同步扫描具体包括:
14、将扫描区域划分为多行或多列;
15、所述固态激光雷达和所述摄像头依次对各行或各列进行扫描,且在同一时刻,所述固态激光雷达和所述摄像头扫描同一行或同一列;
16、在每扫描完一行或一列后,所述固态激光雷达和所述摄像头分别将该行或该列的点云数据和图像数据同步传输至所述处理器;
17、当所述固态激光雷达和所述摄像头均采用按块扫描的方式时,对扫描区域进行同步扫描具体包括:
18、将扫描区域划分为多块;
19、所述固态激光雷达和所述摄像头依次对各块进行扫描,且在同一时刻,所述固态激光雷达和所述摄像头扫描同一块;
20、在每扫描完一块后,所述固态激光雷达和所述摄像头分别将该块的点云数据和图像数据同步传输至所述处理器。
21、进一步地,所述处理器将所述点云数据和所述图像数据融合,具体包括:
22、所述处理器将接收到的扫描区域的所有点云数据和图像数据在时间上对齐,然后将相同时刻的点云数据和图像数据融合,得到扫描区域的融合数据;或
23、针对扫描区域的每一行、列或块,所述处理器在接收到该行、该列或该块的点云数据和图像数据后进行融合,得到该行、该列或该块的融合数据;
24、在扫描完成后,所述处理器将所有行、列或块的融合数据在时间上进行拼接,得到扫描区域的融合数据。
25、本发明的固态激光雷达与摄像头同步工作系统,固态激光雷达和摄像头与同一处理器相连,可实现点云数据和图像数据的同步采集和传输,从而对点云数据和图像数据进行精确融合,丰富了获得的场景信息;固态激光雷达体积小,可减少系统的整体体积;固态激光雷达和摄像头可采用相同的扫描模式,在扫描的同时就可以完成数据融合,效率更高;固态激光雷达、摄像头和处理器设置在同一pcb上,可提高数据采集和传输的同步性,且降低成本。
技术特征:
1.一种固态激光雷达与摄像头同步工作系统,其特征在于,包括固态激光雷达、摄像头和处理器,所述固态激光雷达和所述摄像头均与所述处理器电连接。
2.根据权利要求1所述的固态激光雷达与摄像头同步工作系统,其特征在于,所述处理器设置为同步接收所述固态激光雷达采集的点云数据和所述摄像头采集的图像数据。
3.根据权利要求1所述的固态激光雷达与摄像头同步工作系统,其特征在于,所述固态激光雷达、所述摄像头和所述处理器设置在同一pcb上。
4.根据权利要求1所述的固态激光雷达与摄像头同步工作系统,其特征在于,所述固态激光雷达和所述摄像头的扫描方式相同。
5.根据权利要求4所述的固态激光雷达与摄像头同步工作系统,其特征在于,所述固态激光雷达和所述摄像头的扫描方式均为按行扫描、按列扫描或按块扫描。
6.根据权利要求1所述的固态激光雷达与摄像头同步工作系统,其特征在于,所述激光雷达和所述摄像头的帧率相同。
7.一种固态激光雷达与摄像头同步工作方法,其特征在于,包括:
8.根据权利要求7所述的固态激光雷达与摄像头同步工作方法,其特征在于,在对预设的扫描区域进行同步扫描时,所述固态激光雷达和所述摄像头均采用按行扫描、按列扫描或按块扫描的方式。
9.根据权利要求7所述的固态激光雷达与摄像头同步工作方法,其特征在于,当所述固态激光雷达和所述摄像头均采用按行扫描或按列扫描的方式时,对扫描区域进行同步扫描具体包括:
10.根据权利要求9所述的固态激光雷达与摄像头同步工作方法,其特征在于,所述处理器将所述点云数据和所述图像数据融合,具体包括:
技术总结
本发明涉及一种固态激光雷达与摄像头同步工作系统及方法,系统包括固态激光雷达、摄像头和处理器,所述固态激光雷达和所述摄像头均与所述处理器电连接。本发明的固态激光雷达与摄像头同步工作系统及方法,固态激光雷达和摄像头与同一处理器相连,可实现点云数据和图像数据的同步采集和传输,从而对点云数据和图像数据进行精确融合,丰富了获得的场景信息。
技术研发人员:石磊,惠雨晨,纪淑花,王雪岩,谢斌
受保护的技术使用者:华域汽车系统股份有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!