一种零相位升沉测量方法及系统与流程
本发明属于惯性测量算法,具体涉及一种零相位升沉测量方法及系统。
背景技术:
1、水面舰船、水下航行器等水中运载体在航行过程中,受到波浪、风力因素的影响,会出现周期性的往复运动,称为升沉运动。舰船升沉准确测量在舰船减摇、舰载机起降、水下精确测量等应用领域均有重要作用。但由于水面对电磁波的反射作用,以及水下地形的复杂性等因素,通过gnss、深度计等外界参考信息难以对升沉运动进行准确的测量。惯性导航系统在测量舰船的升沉运动上具有独到的优势,虽然惯导系统存在周期性振荡误差,但与升沉周期相比属于极低频分量,因此可以通过高通滤波器对惯导系统输出的位置信息进行滤波,但任何实时滤波算法都会产生相位差,导致滤波结果存在时间延迟,通过设计低延迟的高通滤波器,能够将特定周期内的信号测量延迟控制在0.1s以内,测量误差能够控制在厘米级,可以满足一般舰船控制系统精度要求。对于某些应用场景,如水下测量、建图等领域,精度需要达到毫米级,实时测量方法难以满足要求,但这些领域对于实时性要求不高,因此可以通过后处理的方式,实现零相位延迟的高精度升沉测量。
技术实现思路
1、本发明的目的在于提供一种零相位升沉测量方法及系统,采用基于时间延迟的方法,构建零相位滤波器,保证升沉测量结果的准确性,并针对区间延迟计算边界不重合的问题,设计了边界条件计算方法。
2、为了实现上述目的,本发明提供了一种零相位升沉测量方法,包括如下步骤
3、依据使用要求设置计算窗口时间宽度,将数据序列按计算窗口时间宽度分段;
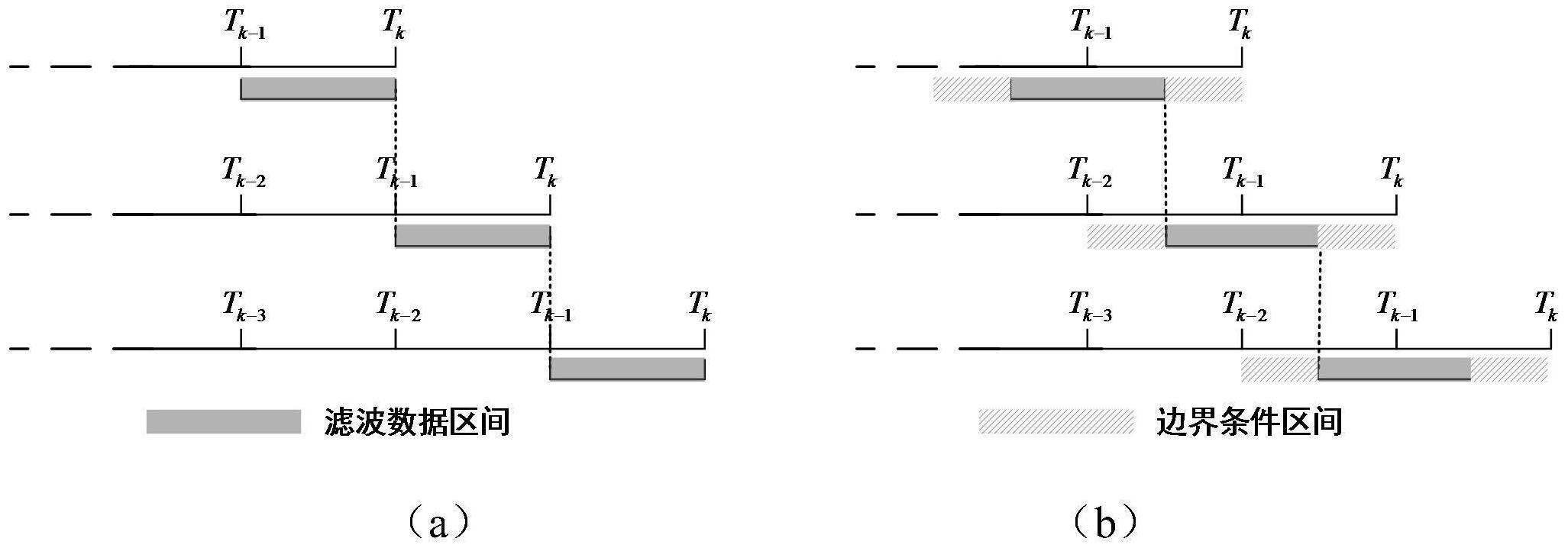
4、确定延迟时间、升沉计算区间及左右边界条件计算区间;
5、采集升沉计算区间、左右边界条件计算区间内的惯性导航系统测量的等效垂向加速度,对其进行滤波处理得到垂向加速度正向滤波输出数列;
6、垂向加速度正向滤波输出数列进行倒序后进行高通滤波,得到垂向加速度逆向滤波输出数列;
7、垂向加速度逆向滤波输出数列进行倒序后得到按时间正向排列的数列即为等效垂向加速度的滤波结果;
8、对滤波结果进行二次积分,得到升沉计算区间内对应各点的升沉测量结果。
9、进一步地,所述确定延迟时间、升沉计算区间及左右边界条件计算区间的方法为
10、令所述计算窗口时间宽度为δt;
11、延迟时间设定为δt/2;
12、升沉计算区间为[tk-1-δt2,tk-1+δt2],tk表示当前时刻,tk=tk-1+δt;
13、左右边界条件计算区间分别为[tk-2,tk-1-δt/2]和[tk-1+δt/2,tk],tk-1=tk-2+δt。进一步地,所述垂向加速度正向滤波输出数列为
14、y1(n)=h(n)*a(n)
15、
16、其中,a(n)为等效垂向加速度计测量值,n为离散化的测量时间序号,n=1,2,...,h(n)为高通滤波器,*表示卷积计算,n为等效垂向加速度数据序列总长度。
17、进一步地,所述升沉测量结果计算公式如下
18、
19、其中,y(n)是等效垂向加速度计测量值的滤波结果。
20、进一步地,还包括验证等效垂向加速度计测量值a(n)与滤波结果y(n)之间是否无相位差的方法,
21、对a(n)、h(n)和y(n)进行傅里叶变换,得到a(ejω)、h(ejω)和y(ejω);
22、依据滤波过程计算
23、y1(ejω)=h(ejω)a(ejω)
24、y2(ejω)=e-jω(n-1)y1(e-jω)
25、y3(ejω)=h(ejω)y2(ejω)
26、y(ejω)=e-jω(n-1)y3(e-jω)
27、其中,ω为频率角速度,n为等效垂向加速度数据序列总长度;
28、推导得到
29、y(ejω)=h(e-jω)h(ejω)a(ejω)
30、确定y(ejω)与a(ejω)之间无相位差。
31、进一步地,所述零相位升沉测量方法用于水面舰船或者水下航行器。
32、本发明还提供了一种零相位升沉测量系统,包括
33、数据分段模块,用于根据使用要求对数据序列分段,以及根据延迟时间和边界确定升沉计算区间、边界条件计算区间;
34、数据滤波模块,用于对输入数据进行滤波处理;
35、倒序模块,用于对输入数据进行倒序排列;
36、输出模块,用于对滤波结果进行二次积分,得到升沉计算区间内对应各点的升沉测量结果。
37、本发明与现有技术相比的有益效果:
38、本发明设计了一种零相位升沉运动测量方法,通过构建零相位滤波器,实现了升沉的精确测量,并针对滤波区间边界测量结果不连续的问题,设计了边界初始条件计算方法,实现了固定延迟计算条件下,长时间升沉的精确测量。
39、本发明属于惯性测量算法,主要用于测量水面舰船、水下航行器等水中运载体的升沉运动。
技术特征:
1.一种零相位升沉测量方法,其特征在于,包括如下步骤
2.根据权利要求1所述的零相位升沉测量方法,其特征在于,所述确定延迟时间、升沉计算区间及左右边界条件计算区间的方法为
3.根据权利要求2所述的零相位升沉测量方法,其特征在于,所述垂向加速度正向滤波输出数列为
4.根据权利要求3所述的零相位升沉测量方法,其特征在于,所述升沉测量结果计算公式如下
5.根据权利要求4所述的零相位升沉测量方法,其特征在于,还包括验证等效垂向加速度计测量值a(n)与滤波结果y(n)之间是否无相位差的方法,
6.根据权利要求1~5中任一项所述的零相位升沉测量方法,其特征在于,所述零相位升沉测量方法用于水面舰船或者水下航行器。
7.一种零相位升沉测量系统,其特征在于,包括
技术总结
本发明提供了一种零相位升沉测量方法及系统,包括设置延迟时间和边界条件确定升沉计算区间;采集升沉计算区间内惯性导航系统测量的等效垂向加速度,对其进行滤波处理得到垂向加速度正向滤波输出数列;垂向加速度正向滤波输出数列进行倒序后进行高通滤波,得到垂向加速度逆向滤波输出数列;垂向加速度逆向滤波输出数列进行倒序后得到按时间正向排列的数列即为等效垂向加速度的滤波结果;对滤波结果进行二次积分,得到升沉计算区间内对应各点的升沉测量结果。本发明通过时间延迟、边界设置构建零相位滤波器,保证升沉测量结果的准确性,克服分段过滤不连续问题。
技术研发人员:周祖洋,庄广琛,郭玉胜,宋雅兰,邓继权
受保护的技术使用者:北京自动化控制设备研究所
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!