一种基于无人机辐射源定位的多目标区域快速搜索方法与流程
:本发明涉及辐射源定位,尤其涉及基于无人机辐射源定位的多目标区域快速搜索方法。
背景技术
0、
背景技术:
1、传统的辐射源定位方法包括有源定位和无源定位两种。有源定位方法需要探测系统本身向外辐射电磁波,具有定位精度高、作用范围大的优点,但其隐蔽性较差,容易暴露探测系统的位置;无源定位技术主要依靠辐射源的来波方向、频率及到达时间等信息实现辐射源的定位,具有隐蔽性强的特点,更适合在非合作区域内应用。
2、传统的辐射源定位方法对于多个目标区域内辐射源的定位存在如下弊端,如:定位系统隐蔽性差、灵活度低、天线遮挡、定位精度受距离限制等。
技术实现思路
0、
技术实现要素:
1、为了克服传统的辐射源定位方法隐蔽性差、灵活度低、天线遮挡、定位精度受距离限制等问题,本发明提出了一种基于无人机辐射源定位的多目标区域快速搜索方法。
2、本发明解决其技术问题所采用的技术方案:
3、一种基于无人机辐射源定位的多目标区域快速搜索方法,包括如下步骤:
4、step1:确定无人机采取的辐射源定位方式和需要搜索的目标区域;
5、step2:判断各个辐射源所属的区域范围是否重叠,如果重叠,选取区域相交的两个点为中间点;否则,则选择区域范围中心作为中间点;
6、step3:将选取的中间点分别作为不同侦查方案中所要经过的节点,通过k均值聚类算法对各个辐射源所属的圆形区域进行分类,得到不同类别数的分类结果;
7、step4:通过蚁群算法分别对不同类别的结果进行路径最优规划,综合配备无人机数量、航程等要素选取最优侦察方案。
8、所述辐射源定位方式采用aoa,所述所述需要搜索的目标区域的构建步骤如下:
9、辐射源定位侦查无人机采用基于aoa的搜索定位方法,根基辐射源定位中设定的信号强度发现阈值和最小辐射源功率,按照电磁传播公式计算无人机的探测范围:
10、p-l=20lg(f)+20lg(d)+32.45 (1)
11、式中,p为有价值的最小辐射源功率(dbm),l为系统设定的信号强度发现阈值(dbm),f为信号频率(mhz),d为系统搜索范围;
12、d=10(p-l-20lg(f)-32.45)/20 (2)
13、按照上式(1)和(2)计算的无人机的搜索范围为直径对待搜索区域疑似目标画圆,进行飞行区域的模型构造,进行辐射源定位的无人机只要经过飞行区域标识的地方,即可完成对疑似辐射源目标的扫描确认。
14、所述各个辐射源所属的区域范围是否重叠的判断步骤如下:两个不相交的圆形探测区域连接的最短距离为圆心的连线减去探测区域直径距离,如果圆心的连线大于探测区域直径的距离,那么两探测区域不重叠,如果圆心的连线小于探测区域直径的距离,那么两探测区域重叠。
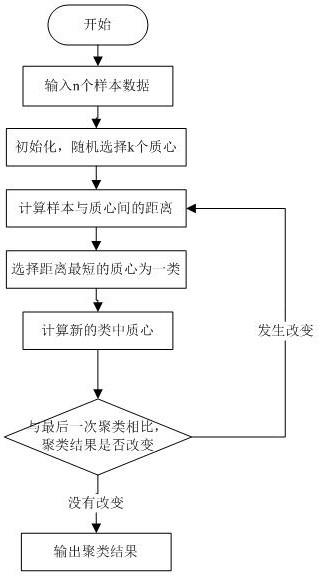
15、所述k均值聚类算法是一种迭代求解的聚类分析算法,其算法的基本思想是随机将多个样本分为k个子集,构成k个类,并随机选取k个样本点作为初始的聚类中心,计算每个样本到每个聚类中心之间的距离,把样本分到距离最近的聚类中;每重新分配一个样本的类别,聚类的聚类中心会根据聚类中的现有对象被重新计算,重复至聚类中心不再变化。
16、所述蚁群算法是一种寻找优化路径的概率型算法,是用蚂蚁的行走路径表示待优化问题的可行解,整个蚂蚁群体的所有路径构成待优化问题可解空间,路径较短的蚂蚁释放的信息素量较多,随着时间的推进,较短的路径上累积的信息素浓度逐渐增加,选择该路径的蚂蚁个数也越来越多,最终整个蚂蚁群在正反馈的作用下集中到最佳路径上,此时对应的便是待优化问题的最优解。
17、由于采用如上所述的技术方案,本发明具有如下优越性:
18、本发明提供的一种基于无人机辐射源定位的多目标区域快速搜索方法,在确定目标区域的基础上,选取多区域范围的交点和中心点做为快速搜索的必经节点,然后通过k均值聚类算法对选取的节点进行分类,在确保满足无人机辐射源定位条件的基础上,通过蚁群算法分别对不同分类结果进行搜索路径的最优规划,综合所有的结果得到时间最短的情况下的多无人机搜索方案,快速完成多目标区域内辐射源的快速定位。利用多无人机实现多个目标区域内辐射源的定位,充分利用了无人机体型小、成本低、机动性强等优点,实现对辐射源的空中抵近定位,同时解决了传统定位系统隐蔽性差、灵活度低、天线遮挡、定位精度受距离限制等诸多问题。
技术特征:
1.一种基于无人机辐射源定位的多目标区域快速搜索方法,其特征在于:包括如下步骤:
2.根据权利要求1所述的一种基于无人机辐射源定位的多目标区域快速搜索方法,其特征在于:所述辐射源定位方式采用aoa,所述所述需要搜索的目标区域的构建步骤如下:
3.根据权利要求1所述的一种基于无人机辐射源定位的多目标区域快速搜索方法,其特征在于:所述各个辐射源所属的区域范围是否重叠的判断步骤如下:两个不相交的圆形探测区域连接的最短距离为圆心的连线减去探测区域直径距离,如果圆心的连线大于探测区域直径的距离,那么两探测区域不重叠,如果圆心的连线小于探测区域直径的距离,那么两探测区域重叠。
4.根据权利要求1所述的一种基于无人机辐射源定位的多目标区域快速搜索方法,其特征在于:所述k均值聚类算法是一种迭代求解的聚类分析算法,其算法的基本思想是随机将多个样本分为k个子集,构成k个类,并随机选取k个样本点作为初始的聚类中心,计算每个样本到每个聚类中心之间的距离,把样本分到距离最近的聚类中;每重新分配一个样本的类别,聚类的聚类中心会根据聚类中的现有对象被重新计算,重复至聚类中心不再变化。
5.根据权利要求1所述的一种基于无人机辐射源定位的多目标区域快速搜索方法,其特征在于:所述蚁群算法是一种寻找优化路径的概率型算法,是用蚂蚁的行走路径表示待优化问题的可行解,整个蚂蚁群体的所有路径构成待优化问题可解空间,路径较短的蚂蚁释放的信息素量较多,随着时间的推进,较短的路径上累积的信息素浓度逐渐增加,选择该路径的蚂蚁个数也越来越多,最终整个蚂蚁群在正反馈的作用下集中到最佳路径上,此时对应的便是待优化问题的最优解。
技术总结
一种基于无人机辐射源定位的多目标区域快速搜索方法,在确定目标区域的基础上,选取多区域范围的交点和中心点做为快速搜索的必经节点,然后通过K均值聚类算法对选取的节点进行分类,在确保满足无人机辐射源定位条件的基础上,通过蚁群算法分别对不同分类结果进行搜索路径的最优规划,综合所有的结果得到时间最短的情况下的多无人机搜索方案,快速完成多目标区域内辐射源的快速定位。利用多无人机实现多个目标区域内辐射源的定位,充分利用了无人机体型小、成本低、机动性强等优点,实现对辐射源的空中抵近定位,同时解决了传统定位系统隐蔽性差、灵活度低、天线遮挡、定位精度受距离限制等诸多问题。
技术研发人员:刘连照,王道酉,马晖,周凯,魏文晓,徐宙,戴幻尧,张泽华,张景伟
受保护的技术使用者:中国人民解放军63892部队
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!