一种基于路径瞄准点的自适应导航方法与流程
本发明涉及机器人导航,具体是一种基于路径瞄准点的自适应导航方法。
背景技术:
1、随着科学技术的发展,人工智能领域机器人发展已经趋于成熟,现如今机器人技术已经成为当下最热门的话题,如何丰富机器人的功能,提升用户体验,是机器人厂商占领市场的重点,机器人与互联网的运用将改变现有的生活节奏,将改变现有人类的生活方式,成为第四次工业革命的关键因素,其中机器人导航技术是移动机器人领域研究的热门问题之一,随着人工智能技术的发展,机器人在人类社会中发挥了越来越明显的作用,为了保证机器人能够适应复杂的社区环境,使其在环境中安全高效运动行走,导航系统必须足够强大。
2、在现代机器人导航中,精确的路径规划和有效的障碍物避障是关键问题,传统的导航方法通常依赖于静态的地图和固定的路径规划,无法适应动态环境和实时变化的需求。因此,需要一种新的导航方法,能够根据动态环境和实时需求生成可靠的导航策略,并提供精确的运动控制;为此,我们设计一种基于路径瞄准点的自适应导航方法来解决上述技术问题。
技术实现思路
1、本发明的目的在于提供一种基于路径瞄准点的自适应导航方法,以解决上述背景技术中提出的问题。
2、为实现上述目的,本发明提供如下技术方案:
3、一种基于路径瞄准点的自适应导航方法,包括如下方法:
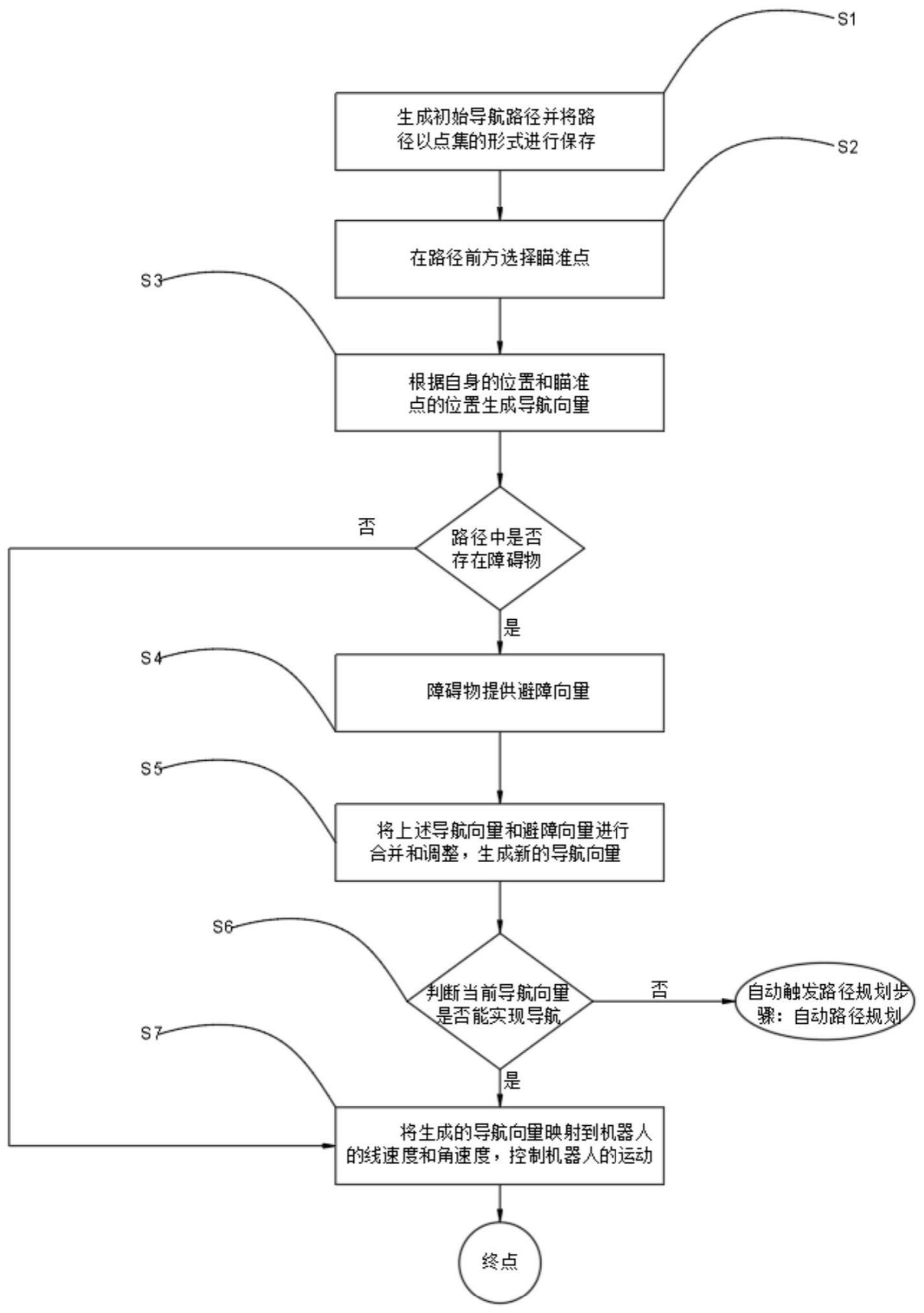
4、步骤s1、路径生成:根据环境信息和导航目标,生成机器人的初始导航路径,生成的路径在地图上以点集的形式进行保存;
5、步骤s2、瞄准点设置:在路径前方选择一个瞄准点,在第一步的基础上,机器人首先确定自身的位置属于点集中的哪一个点,然后基于自身点往前预判n个点,并将其前方的第n个点作为其瞄准目标,然后将自身的坐标位置与目标点进行连线,并将这条连线使用向量的方法进行标准化;
6、步骤s3、向量生成:机器人围绕自身位置和瞄准点的位置生成一个导航向量,若路径中无障碍物则直接进入步骤s7;若路径中有障碍物则进入步骤s4;
7、步骤s4、空间中的障碍物会提供一个避障向量,表示避开障碍物的方向;
8、步骤s5、内部处理:通过内部处理算法,将机器人位置和瞄准点向量与障碍物向量进行合并和调整,生成新的导航向量;
9、步骤s6、导航判断:机器人判断当前导航向量是否能够实现导航;a)如果导航向量可以实现导航,则进入步骤s7;b)如果导航向量无法实现导航,机器人将自动触发路径规划步骤,重新生成可行的导航路径;
10、步骤s7、运动控制:将生成的导航向量映射到机器人的线速度和角速度,控制机器人的运动,直至终点。
11、作为本发明的优选方案:所述步骤s1中初始导航路径的规划可以基于已有的地图或实时的环境感知数据。
12、作为本发明再进一步的优选方案:所述初始导航路径在地图上以点集的形式进行保存,每一个点都以xy坐标进行标记。
13、作为本发明再进一步的优选方案:所述步骤s2中瞄准点的选择可以基于路径规划的策略,如到达目标的最短路径或避免障碍物。
14、作为本发明再进一步的优选方案:所述步骤s3中生成的导航向量的方法是使用自身的点坐标x1,y1,与目标点之间的距离x2,y2之间进行连接,构成的向量进行单位化,用于确定机器人的运动方向和距离。
15、作为本发明再进一步的优选方案:所述步骤s5中生成的新的导航向量的方法是首先机器人围绕其自身的指向,向左方向和右方向生成一个模板,模板向量垂直于机器人自身运动方向,然后为模板适配一个特别小的初始参数,并将这套参数适配到障碍物向量中,基于这套参数以及机器人自身与目标之间的向量以及障碍物生成的向量三者,进行向量叠加,使用航迹推演算法预测机器人未来的未知是否会与环境中的障碍物进行碰撞,如果发生碰撞,则增大模板参数,直到机器人与障碍物无碰撞为止。
16、作为本发明再进一步的优选方案:所述步骤s6中机器人自动触发路径规划步骤如下:a1:将步骤s1中的路径点集进行截断;a2:将步骤s2中的瞄准点数据后的点作为新的目标点;a3:使用迪杰斯特拉算法计算机器人当前位置与目标位置的路径规划;a4:将该路径规划生成的点替换掉原来路径中设置的点,实现路径的重规划。
17、作为本发明再进一步的优选方案:所述步骤s7中的运动控制基于生成的向量,机器人判断自身坐标位置与机器人目标点之间的连接向量,这两个向量在数学上的夹角就是机器人的转向角,设定一个标准速度模板v,其中速度v的最大值为1米每秒。
18、与现有技术相比,本发明的有益效果是:本发明通过引入路径瞄准点和自动触发路径规划,实现了自适应导航,机器人能够根据实时环境信息调整导航策略,适应动态变化的情况,提高导航的灵活性和适应性;通过生成机器人围绕自身位置和瞄准点的导航向量,并结合障碍物感知信息,本发明能够实现精确的导航和避障,提高导航的准确性和安全性;本发明通过内部处理算法将机器人位置和瞄准点向量与障碍物向量进行合并和调整,生成新的导航向量,并将其映射到机器人的线速度和角速度,这种高效导航控制使得机器人能够快速、准确地响应导航指令,提高导航的效率和稳定性。
技术特征:
1.一种基于路径瞄准点的自适应导航方法,其特征在于,包括如下方法:
2.根据权利要求1所述的一种基于路径瞄准点的自适应导航方法,其特征在于:所述步骤s1中初始导航路径的规划可以基于已有的地图或实时的环境感知数据。
3.根据权利要求2所述的一种基于路径瞄准点的自适应导航方法,其特征在于:所述初始导航路径在地图上以点集的形式进行保存,每一个点都以xy坐标进行标记。
4.根据权利要求1所述的一种基于路径瞄准点的自适应导航方法,其特征在于:所述步骤s2中瞄准点的选择可以基于路径规划的策略,如到达目标的最短路径或避免障碍物。
5.根据权利要求1所述的一种基于路径瞄准点的自适应导航方法,其特征在于:所述步骤s3中生成的导航向量的方法是使用自身的点坐标x1,y1,与目标点之间的距离x2,y2之间进行连接,构成的向量进行单位化,用于确定机器人的运动方向和距离。
6.根据权利要求1所述的一种基于路径瞄准点的自适应导航方法,其特征在于:所述步骤s5中生成的新的导航向量的方法是首先机器人围绕其自身的指向,向左方向和右方向生成一个模板,模板向量垂直于机器人自身运动方向,然后为模板适配一个特别小的初始参数,并将这套参数适配到障碍物向量中,基于这套参数以及机器人自身与目标之间的向量以及障碍物生成的向量三者,进行向量叠加,使用航迹推演算法预测机器人未来的未知是否会与环境中的障碍物进行碰撞,如果发生碰撞,则增大模板参数,直到机器人与障碍物无碰撞为止。
7.根据权利要求1所述的一种基于路径瞄准点的自适应导航方法,其特征在于:所述步骤s6中机器人自动触发路径规划步骤如下:a1:将步骤s1中的路径点集进行截断;a2:将步骤s2中的瞄准点数据后的点作为新的目标点;a3:使用迪杰斯特拉算法计算机器人当前位置与目标位置的路径规划;a4:将该路径规划生成的点替换掉原来路径中设置的点,实现路径的重规划。
8.根据权利要求1所述的一种基于路径瞄准点的自适应导航方法,其特征在于:所述步骤s7中的运动控制基于生成的向量,机器人判断自身坐标位置与机器人目标点之间的连接向量,这两个向量在数学上的夹角就是机器人的转向角,设定一个标准速度模板v,其中速度v的最大值为1米每秒。
技术总结
本发明公开了一种基于路径瞄准点的自适应导航方法,首先生成初始导航路径,然后选择瞄准点,并生成一个导航向量,同时,障碍物也会提供一个避障向量,通过内部处理算法,将机器人位置和瞄准点向量与障碍物向量进行合并和调整,生成新的导航向量;如果导航向量无法实现导航,机器人将自动触发路径规划步骤,重新生成可行的导航路径;本发明通过内部处理算法将机器人位置和瞄准点向量与障碍物向量进行合并和调整,生成新的导航向量,能实现精确的导航和避障,并沿着规划的路径准确导航,提高导航的准确性和安全性,机器人能够根据实时环境信息调整导航策略,适应动态变化的情况,提高导航的灵活性和适应性。
技术研发人员:赵子建,刘洋,黄晓宇,王飞涛,陈太平,刘东伟,程老虎
受保护的技术使用者:合肥哈工澳汀智能科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!