一种用于交通雷达的线性航迹关联方法与流程
本发明涉及雷达数据信号处理,尤其涉及一种用于交通雷达的线性航迹关联方法。
背景技术:
1、航迹关联问题指的是通过带有噪声的一个或者多个传感器的测量数据以及已有的先验知识,对测量真实数值进行估计的过程。对于交通雷达,通过雷达回波得到目标的径向距离、水平方位、多普勒频率和信号幅度,对目标的真实二维位置、航速航向进行估计。
2、航迹关联是交通雷达数据处理的关键环节。singer和kanyuch最早提出了加权航迹关联方法,bar-shalom对其进行了修正,提出了修正航迹关联算法。在此基础上,kosaka等学者给出了最近领域航迹关联方法。bowman利用最大似然估计描述了航迹关联方法。youens等学者基于运筹学中的经典分配给出了航迹关联算法。目前常用的航迹关联方法包括:卡尔曼滤波加权算法、最优分布式航迹关联算法、模糊航迹融合等。
3、卡尔曼滤波是航迹关联中常用的估计预测方法。基础的卡尔曼滤波只能处理线性模型,而常规使用非线性卡尔曼滤波解决的航机关联问题,运算量较大,为此我们提出一种能够实现近似实现线性卡尔曼滤波的用于交通雷达的线性航迹关联方法。
技术实现思路
1、本发明要解决的技术问题是克服现有技术存在的缺陷,本发明提出了一种可以利用重复点云近似实现线性卡尔曼滤波的用于交通雷达的线性航迹关联方法。
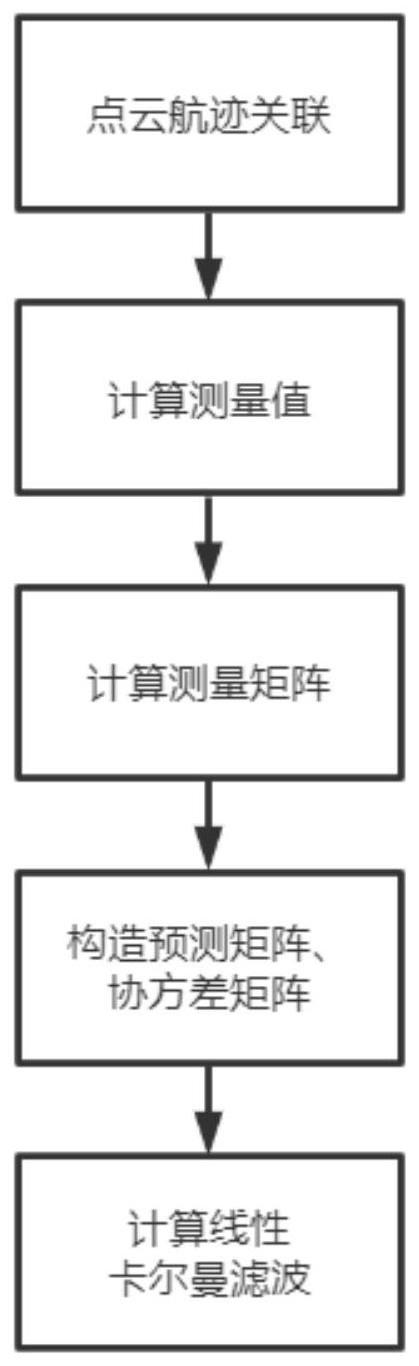
2、为解决上述技术问题,本发明采用的技术方案是:一种用于交通雷达的线性航迹关联方法,包括如下步骤:
3、s1、对航迹m和点云数据n进行关联,关联门限长度通过点云数据n的k-distance函数的二阶导数的极值对应;
4、s2、对关联后的任一航迹m,计算其对应点云数n的测量值,由测量值计算当前航迹m的测量矩阵z以表征当前测量值;
5、s3、构造对应交通车辆的预测矩阵a、测量协方差矩阵r以及预测协方差矩阵q,其中,a为固定矩阵,用于预测车辆运动状态,r和q均用于记录车辆状态对应数值的预设测量协方差,且r用以表征z的误差及对应关系,q用以表征a的误差及对应关系;
6、s4、计算线性卡尔曼滤波、前航迹m的估计矩阵x以及下一次的估计矩阵x_,其中x由航迹m的测量值以及上一次的预测值估计得到,x_由当前预测值估计得到;
7、s5、重复上述步骤至所有航迹关联完成。
8、进一步地,所述步骤s1中,航迹m和点云数据n关联的具体步骤为,
9、对任一航迹m,计算其与其对应点云数据n的代价函数c(m,n),若c(m,n)小于s1中关联门限长度,认为当前点云数据n与航迹m相关,否则认为不相关,其中每一航迹m对应的点云数据n包括0个或多个。
10、进一步地,所述步骤s1中,每一点云数据均包括距离r、方位a、多普勒d、幅度snr四维信息,航迹m和点云n关联的代价函数为,
11、
12、其中,rthreshold、athreshold、dthreshold为关联的门限长度,t为航迹m的下标,p为点云数据n的下标。
13、进一步地,所述步骤s2中,航迹m当前数据帧的测量值计算步骤如下,
14、
15、
16、
17、其中,t-meas表明当前航迹t的测量值,dp(n)为多普勒频率。
18、进一步地,所述步骤s3中,航迹m的测量矩阵z计算步骤如下,
19、z=[rx(t) ry(t) vx(t) vy(t) ax(t) ay(t)]t
20、vx(t)=rx(t)-rx(t-1),
21、vy(t)=ry(t)-ry(t-1),
22、ax(t)=rx(t)-2rx(t-1)+rx(t-2),
23、ay(t)=ry(t)-2ry(t-1)+ry(t-2)
24、其中,
25、
26、其中,rx/ry/vs/vy/ax/ay用于表示车辆的运动状态。
27、进一步地,所述步骤s4中,预测矩阵a计算步骤如下,
28、
29、其中,δt代表时间间隔。
30、进一步地,所述步骤s4中,测量协方差矩阵r与预测协方差矩阵q构造如下,
31、
32、
33、其中,rfac为观测方差,qfac为预测方差。
34、进一步地,所述步骤s4中,估计矩阵x与下一次估计矩阵x_计算步骤如下,
35、x_=ax
36、p_=apat+q
37、k=p_/(p_+r)
38、x=x_+k(z-x_)
39、p=(i-k)*p_
40、其中,i为单元矩阵,k为卡尔曼增益,p为估计协方差矩阵,p_为下一次的估计协方差矩阵。
41、一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现如上述所述的用于交通雷达的线性航迹关联方法的步骤。
42、一种非暂态计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时用于实现上述所述的用于交通雷达的线性航迹关联方法的步骤。
43、与现有技术相比,本发明的有益效果包括:通过将点云信息从球坐标转换至直角坐标,利用雷达数据率高,具有重复点云的特性,通过线性卡尔曼滤波进行航迹关联。再通过线性卡尔曼滤波计算,关联过程计算量较小;无需额外的先验信息,包括雷达安装高度等;直角坐标系下,参数的调整较为容易。
技术特征:
1.一种用于交通雷达的线性航迹关联方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的一种用于交通雷达的线性航迹关联方法,其特征在于:所述步骤s1中,航迹m和点云数据n关联的具体步骤为,
3.根据权利要求2所述的一种用于交通雷达的线性航迹关联方法,其特征在于:所述步骤s1中,每一点云数据均包括距离r、方位a、多普勒d、幅度snr四维信息,
4.根据权利要求1所述的一种用于交通雷达的线性航迹关联方法,其特征在于:所述步骤s2中,航迹m当前数据帧的测量值计算步骤如下,
5.根据权利要求1所述的一种用于交通雷达的线性航迹关联方法,其特征在于:所述步骤s3中,航迹m的测量矩阵z计算步骤如下,
6.根据权利要求1所述的一种用于交通雷达的线性航迹关联方法,其特征在于:所述步骤s4中,预测矩阵a计算步骤如下,
7.根据权利要求1所述的一种用于交通雷达的线性航迹关联方法,其特征在于:所述步骤s4中,测量协方差矩阵r与预测协方差矩阵q构造如下,
8.根据权利要求1所述的一种用于交通雷达的线性航迹关联方法,其特征在于:所述步骤s4中,估计矩阵x与下一次估计矩阵x_计算步骤如下,
9.一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,其特征在于:所述处理器执行所述程序时实现如权利要求1至8任一项所述的用于交通雷达的线性航迹关联方法的步骤。
10.一种非暂态计算机可读存储介质,其上存储有计算机程序,其特征在于:所述计算机程序被处理器执行时用于实现上述权利要求1至8任一项所述的用于交通雷达的线性航迹关联方法的步骤。
技术总结
本发明提出了一种用于交通雷达的线性轨迹关联方法,解决了常规航迹关联中,利用非线性卡尔曼滤波处理运算复杂度大的局限性,其主要步骤包括:S1、对航迹m和点云数据n进行关联,关联门限长度通过点云数据n的k‑distance函数的二阶导数的极值对应;S2、对关联后的任一航迹m,计算其对应点云数n的测量值,由测量值计算当前航迹m的测量矩阵Z以表征当前测量值;S3、构造对应交通车辆的预测矩阵A、测量协方差矩阵R以及预测协方差矩阵Q;S4、计算线性卡尔曼滤波、前航迹m的估计矩阵X以及下一次的估计矩阵X_,其中X由航迹m的测量值以及上一次的预测值估计得到,X_由当前预测值估计得到;S5、重复上述步骤至所有航迹关联完成。
技术研发人员:翁晓明,杨大宁
受保护的技术使用者:苏州雷森电子科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!