一种基于FPGA的无刷电动舵机故障检测系统及方法与流程
本发明属于电动伺服控制,具体涉及一种基于fpga的无刷电动舵机故障检测系统及方法。
背景技术:
1、传统的电动舵机故障检测技术采用电流传感器配合高性能处理器实现,基本策略是综合分析反馈信号对指令的跟随情况以及电流传感器采集电流判断故障类型。这种方法需要附加专用传感器,增加了设备体积和投资成本,不利于小型化、低成本的设计。且电动舵机中的角位移传感器开路故障和舵机卡滞故障的表现相似,现有技术很难精准定位故障类型。
技术实现思路
1、为了解决上述现有技术的问题,本发明提供一种基于fpga的无刷电动舵机故障检测系统及方法,无需增加硬件检测电路,具有成本低、可移植性强的特点,可同时检测并处置无刷电动舵机霍尔传感器开路或短路故障、角位移传感器开路故障。
2、本发明通过以下技术方案实现:
3、一种基于fpga的无刷电动舵机故障检测系统,包括fpga、第一计数器、第二计数器和第三计数器;所述fpga包括霍尔故障检测模块和角位移故障检测模块;
4、所述霍尔故障检测模块,用于获取无刷电动舵机中霍尔传感器状态,当霍尔传感器状态改变时,若此时霍尔传感器状态为0象限或7象限,则使第一计数器加1;根据第一计数器的累加值判断霍尔传感器是否出现故障;
5、所述角位移故障检测模块,用于接收无刷电动舵机中adc模块采集的角位移传感器的电压信息并处理得到角位移传感器的反馈信号;获取无刷电动舵机中霍尔传感器状态,当出现一次132645循环霍尔序列时,则使第二计数器加1,当出现一次546231循环霍尔序列时,则使第三计数器加1;当第二计数器或第三计数器的累加值为预设值n时,计算第二计数器或第三计数器的累加值为1时角位移传感器的反馈信号和第二计数器或第三计数器的累加值为n时角位移传感器的反馈信号的差值,若差值小于预设值t,则认为角位移传感器故障。
6、优选的,所述fpga包括控制模块,所述控制模块用于根据无刷电动舵机中角位移传感器的反馈信号调整控制量并输出给无刷电动舵机中无刷电机1以控制无刷电机1的旋转状态。
7、优选的,所述角位移故障检测模块包括计数模块、反馈记录模块和故障判断模块;
8、所述计数模块,用于获取无刷电动舵机中霍尔传感器状态,当出现一次132645循环霍尔序列时,使第二计数器加1,当出现一次546231循环霍尔序列时,使第三计数器加1;
9、所述反馈记录模块,用于接收adc模块采集的角位移传感器的电压信息并处理得到角位移传感器的反馈信号,并记录第二计数器和第三计数器的累加值分别为1和n时角位移传感器的反馈信号;
10、所述故障判断模块,用于计算第二计数器或第三计数器的累加值为1时角位移传感器的反馈信号与第二计数器或第三计数器的累加值为n时角位移传感器的反馈信号的差值,将差值与预设值t作比较,若差值小于t,则判定角位移传感器故障发生。
11、优选的,所述根据第一计数器的累加值判断霍尔传感器是否出现故障,具体是:若第一计数器的累加值为预设值m,则判断霍尔传感器出现故障。
12、进一步的,m为4-7。
13、优选的,n为2-6。
14、优选的,t为0.5°。
15、优选的,所述无刷电动舵机,包括无刷电机、减速器、输出轴、舵片、角位移传感器和adc模块;无刷电机中设置有霍尔传感器,无刷电机通过减速器与输出轴传动连接,输出轴与舵片固定连接;角位移传感器用于采集舵片的位置信息并将采集的位置信息作为反馈信号输出给无刷电机的控制模块;adc模块用于采集角位移传感器的电压信息并传输给角位移故障检测模块。
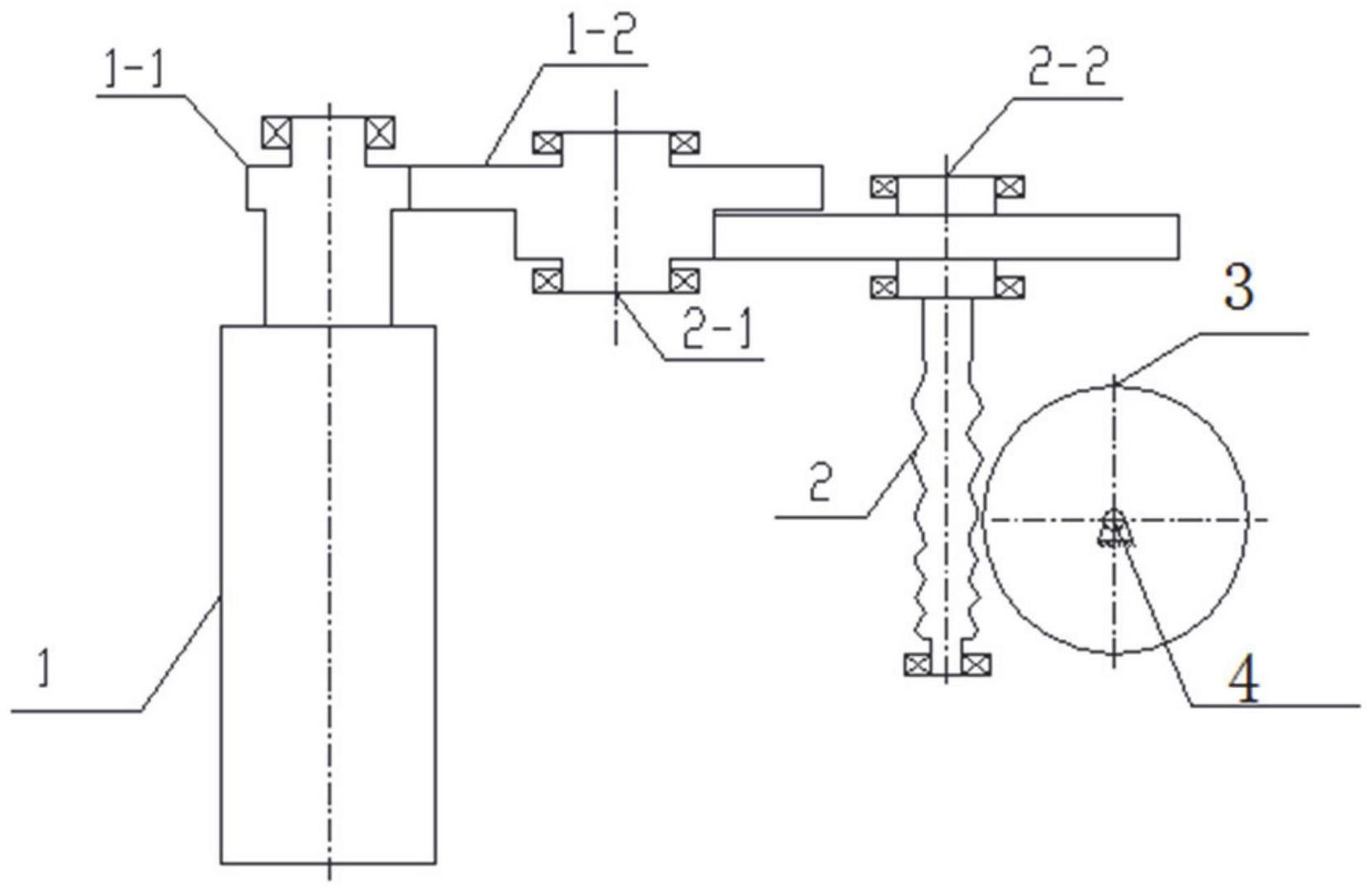
16、进一步的,所述减速器包括第一齿轮、第二齿轮、第三齿轮、第四齿轮、蜗杆、蜗轮;无刷电机的输出轴与第一齿轮同轴固定连接,第一齿轮与第二齿轮啮合连接,第二齿轮与第三齿轮固定连接,第三齿轮与第四齿轮啮合连接,第四齿轮与蜗杆固定连接,蜗杆与蜗轮啮合连接,蜗轮与输出轴同轴固定连接。
17、一种基于fpga的无刷电动舵机故障检测方法,基于所述的无刷电动舵机故障检测系统,包括:
18、所述霍尔故障检测模块获取无刷电动舵机中霍尔传感器状态,当霍尔传感器状态改变时,若此时霍尔传感器状态为0象限或7象限,则使第一计数器加1;根据第一计数器的累加值判断霍尔传感器是否出现故障,当判断霍尔传感器故障时;
19、所述角位移故障检测模块接收adc模块采集的电压信息并处理得到角位移传感器的反馈信号;获取无刷电动舵机中霍尔传感器状态,当出现一次132645循环霍尔序列时,则使第二计数器加1,当出现一次546231循环霍尔序列时,则使第三计数器加1;当第二计数器或第三计数器的累加值为预设值n时,计算第二计数器或第三计数器的累加值为1时角位移传感器的反馈信号和第二计数器或第三计数器的累加值为n时角位移传感器的反馈信号的差值,若差值小于预设值t,则认为角位移传感器故障。
20、与现有技术相比,本发明具有如下的有益效果:
21、本发明提出了基于fpga的无刷电动舵机故障检测技术,在无需附加硬件检测电路、电流传感器的情况下,以舵机控制算法中的反馈信号(adc模块采集的电压信息)和霍尔信号(霍尔传感器状态)为输入进行故障判断和处置,具有成本低,可移植性强的特点。相对于传统高性能处理器,fpga具有高速、并行工作的特点,可同时检测并处置无刷电动舵机霍尔传感器开路或短路故障、角位移传感器开路故障。本发明提出的基于fpga的无刷电动舵机故障检测技术,在舵机工作过程中,可以精准的定位角位移传感器开路故障并处置,同时将故障类型上报。
22、进一步的,本发明中将m设为4-7,既不容易将因偶然原因出现的霍尔传感器状态错误误判为霍尔传感器故障,又能在霍尔传感器故障时识别出故障,从而能准确的检测出霍尔传感器故障。
技术特征:
1.一种基于fpga的无刷电动舵机故障检测系统,其特征在于,包括fpga、第一计数器、第二计数器和第三计数器;所述fpga包括霍尔故障检测模块和角位移故障检测模块;
2.根据权利要求1所述的基于fpga的无刷电动舵机故障检测系统,其特征在于,所述fpga包括控制模块,所述控制模块用于根据无刷电动舵机中角位移传感器的反馈信号调整控制量并输出给无刷电动舵机中无刷电机1以控制无刷电机1的旋转状态。
3.根据权利要求1所述的基于fpga的无刷电动舵机故障检测系统,其特征在于,所述角位移故障检测模块包括计数模块、反馈记录模块和故障判断模块;
4.根据权利要求1所述的基于fpga的无刷电动舵机故障检测系统,其特征在于,所述根据第一计数器的累加值判断霍尔传感器是否出现故障,具体是:若第一计数器的累加值为预设值m,则判断霍尔传感器出现故障。
5.根据权利要求4所述的基于fpga的无刷电动舵机故障检测系统,其特征在于,m为4-7。
6.根据权利要求1所述的基于fpga的无刷电动舵机故障检测系统,其特征在于,n为2-6。
7.根据权利要求1所述的基于fpga的无刷电动舵机故障检测系统,其特征在于,t为0.5°。
8.根据权利要求1所述的基于fpga的无刷电动舵机故障检测系统,其特征在于,所述无刷电动舵机,包括无刷电机(1)、减速器、输出轴(4)、舵片、角位移传感器和adc模块;无刷电机(1)中设置有霍尔传感器,无刷电机(1)通过减速器与输出轴(4)传动连接,输出轴(4)与舵片固定连接;角位移传感器用于采集舵片的位置信息并将采集的位置信息作为反馈信号输出给无刷电机(1)的控制模块;adc模块用于采集角位移传感器的电压信息并传输给角位移故障检测模块。
9.根据权利要求8所述的基于fpga的无刷电动舵机故障检测系统,其特征在于,所述减速器包括第一齿轮(1-1)、第二齿轮(1-2)、第三齿轮(2-1)、第四齿轮(2-2)、蜗杆(2)、蜗轮(3);无刷电机(1)的输出轴与第一齿轮(1-1)同轴固定连接,第一齿轮(1-1)与第二齿轮(1-2)啮合连接,第二齿轮(1-2)与第三齿轮(2-1)固定连接,第三齿轮(2-1)与第四齿轮(2-2)啮合连接,第四齿轮(2-2)与蜗杆(2)固定连接,蜗杆(2)与蜗轮(3)啮合连接,蜗轮(3)与输出轴(4)同轴固定连接。
10.一种基于fpga的无刷电动舵机故障检测方法,其特征在于,基于权利要求1-9任一项所述的系统,包括:
技术总结
本发明提供一种基于FPGA的无刷电动舵机故障检测系统及方法,在无需附加硬件检测电路、电流传感器的情况下,以舵机控制算法中的反馈信号(ADC模块采集的电压信息)和霍尔信号(霍尔传感器状态)为输入进行故障判断和处置,具有成本低,可移植性强的特点。相对于传统高性能处理器,FPGA具有高速、并行工作的特点,可同时检测并处置无刷电动舵机霍尔传感器开路或短路故障、角位移传感器开路故障。本发明提出的基于FPGA的无刷电动舵机故障检测技术,在舵机工作过程中,可以精准的定位角位移传感器开路故障并处置,同时将故障类型上报。
技术研发人员:宋瑞,王琳琳,杨模,贺巧玲
受保护的技术使用者:西安微电子技术研究所
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!