路端多感知设备的交互式标定方法、装置及电子设备与流程
本发明涉及智慧交通,特别涉及一种路侧多感知设备的交互式标定方法、装置及电子设备。
背景技术:
1、车路协同已成为国内自动驾驶产业落地的关键。车路协同是指将聪明的车和智慧的路相结合,以实现“人—车—路—云”的高效协同,大大增加了检测范围并减少车端的运算负担,让自动驾驶落地更容易,成本更低,并能提供更多的安全冗余。智慧的路需要在路端布局多种传感器和边缘计算设备,多种传感设备提供准确、全面的感知数据给边缘计算设备,边缘计算设备基于此进行多传感数据融合、检测、决策等操作,让后将相关数据与车端进行共享。多传感器的融合需要进行多传感设备标定。
2、现有的路端多传感设备标定通常是在路端采集一批标定数据,然后通过人工对该标定数据进行粗略筛选,包括将明显遮挡、目标物不清楚、时间戳不匹配的感知数据删除,最后基于筛选后的标定数据进行标定。本发明人在实施本方案的过程中发现,经过初略筛选的标定数据还存在很多无法确定关键点的数据,基于此进行的标定准确率普遍偏低。实际工程中,工作人员不得不反复到端进行多次打点标定,直到获得满足基本要求的标定结果,导致标定成本普遍偏高。
技术实现思路
1、本发明实施例提供一种路端多感知设备的交互式标定方法、装置及电子设备,用于解决现有技术中路端多感知设备标定准确性较低、标定成本较高的技术问题。
2、第一方面,本申请实施例提供一种路端多感知设备的交互式标定方法,应用于交互式标定装置,所述交互式标定装置与路端的rtk设备、雷达、相机通信连接,所述交互式标定方法包括:
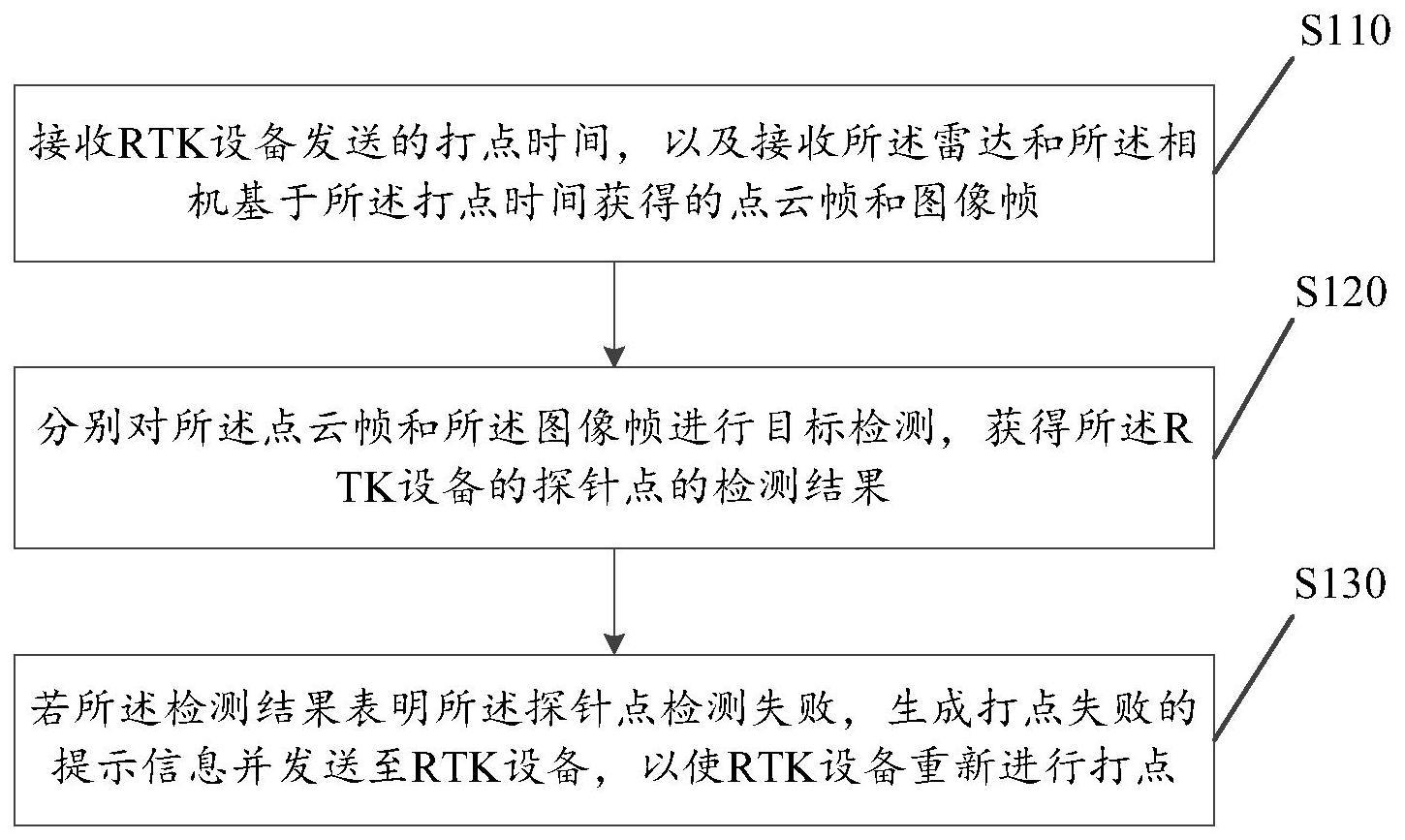
3、接收rtk设备发送的打点时间,以及接收所述雷达和所述相机基于所述打点时间获得的点云帧和图像帧;
4、分别对所述点云帧和所述图像帧进行目标检测,获得所述rtk设备的探针点的检测结果;
5、若所述检测结果表明所述探针点检测失败,生成打点失败的提示信息并发送至所述rtk设备,以使所述rtk设备重新进行打点。
6、可选的,所述方法还包括:
7、在接收到所述打点时间之后,触发所述雷达和所述相机进行感知数据采集;
8、并接收所述雷达和所述相机反馈的感知数据,从所述感知数据中获取时间戳与所述打点时间最近的点云帧和图像帧。
9、可选的,若所述检测结果表明所述探针点检测失败,生成打点失败的提示信息,具体包括:
10、基于图像帧的检测结果判断所述rtk设备是否被遮挡;
11、若所述rtk设备被遮挡,生成打点失败的遮挡提示信息,以使所述rtk设备调整打点位置后重新进行打点。
12、可选的,所述rtk设备包含由对中杆和横杆组成的十字形标定杆,所述对中杆和所述横杆可伸缩,和/或所述横杆可相对所述对中杆左右转动;
13、若所述rtk设备未被遮挡,所述生成打点失败的提示信息,包括:
14、生成打点失败需调整所述对中杆和/或所述横杆的第一提示信息,和/或,
15、生成打点失败需调整所述横杆的水平角的第二提示信息。
16、可选的,所述方法还包括:
17、若所述检测结果表明所述探针点检测成功,对所述探针点的点云坐标、图像坐标以及gps坐标进行配对并保存;
18、当配对点数大于设定阈值时,计算任意两个感知设备之间坐标点转换所需的初始转换矩阵;
19、基于所述初始转换矩阵验证下一对配对点并获得映射误差;
20、若所述映射误差大于设定误差阈值,生成继续打点提示并发送,若所述映射误差小于或等于所述设定误差阈值,生成中止打点提示并发送。
21、可选的,若所述映射误差大于设定误差阈值,所述方法还包括:
22、基于所述初始转换矩阵验证所有配对点,获得映射误差最大的n个配对点,n≥3;
23、基于所述n个配对点确定目标打点区域,并将所述目标打点区域发送至所述rtk设备,以使所述rtk设备在所述目标打点区域内继续打点。
24、可选的,若所述映射误差大于设定误差阈值,所述方法还包括:
25、基于所有配对点构建打点地图;
26、将所述打点地图与目标检测区域进行对比,将目标检测区域中打点未覆盖或者覆盖率低于覆盖阈值的区域作为目标打点区域;
27、将所述目标打点区域发送至所述rtk设备,以使所述rtk设备在所述目标打点区域内继续打点。
28、第二方面,本申请实施例提供一种交互式标定装置,所述交互式标定装置与路端的rtk设备、雷达、相机通信连接,所述交互式标定装置包括:
29、接收单元,用于接收rtk设备发送的打点时间,以及接收所述雷达和所述相机基于所述打点时间获得的点云帧和图像帧;
30、检测单元,用于分别对所述点云帧和所述图像帧进行目标检测,获得所述rtk设备的探针点的检测结果;
31、生成单元,用于在所述检测结果表明所述探针点检测失败的情况下,生成打点失败的提示信息;
32、发送单元,用于发送至所述rtk设备,以使所述rtk设备重新进行打点。
33、第三方面,本申请实施例提供一种电子设备,包括有存储器,以及一个或者一个以上的程序,其中一个或者一个以上的程序存储于存储器中,且经配置由一个或者一个以上处理器执行所述一个或者一个以上的程序实现如第一方面所述的任一方法。
34、第四方面,本申请实施例提供一种计算机可读存储介质,其上存储有计算机程序,其特征在于,该程序被处理器执行时实现如第一方面所述的任一方法。
35、本申请实施例中的上述一个或多个技术方案,至少具有如下技术效果:
36、本申请实施例提供一种路端多感知设备的交互式标定方法,通过建立rtk设备、雷达、相机以及标定装置之间的通信连接,在标定过程中边打点边进行探针点检测即标定所需关键点检测,对检测失败的打点位置进行重打点提示,以使最终得到的打点数据均为有效的打点数据,基于此打点数据进行标定能够有效的提升标定准确性,并且,该方法可以一次性获得大量的有效打点数据,无需工作人员反复去往路端进行打点,大大降低了标定成本,可见,本申请实施例提供的上述技术方案解决了现有技术中路端多感知设备标定准确性较低、标定成本较高的技术问题,提高了路端多感知设备标定的准确性、降低了标定成本。
技术特征:
1.一种路端多感知设备的交互式标定方法,其特征在于,应用于交互式标定装置,所述交互式标定装置与路端的rtk设备、雷达、相机通信连接,所述交互式标定方法包括:
2.如权利要求1所述的交互式标定方法,其特征在于,所述方法还包括:
3.如权利要求1所述的交互式标定方法,其特征在于,若所述检测结果表明所述探针点检测失败,生成打点失败的提示信息,具体包括:
4.如权利要求3所述的交互式标定方法,其特征在于,所述rtk设备包含由对中杆和横杆组成的十字形标定杆,所述对中杆和所述横杆可伸缩,和/或所述横杆可相对所述对中杆左右转动;
5.如权利要求1-4任一所述的交互式标定方法,其特征在于,所述方法还包括:
6.如权利要求5所述的交互式标定方法,其特征在于,若所述映射误差大于设定误差阈值,所述方法还包括:
7.如权利要求5所述的交互式标定方法,其特征在于,若所述映射误差大于设定误差阈值,所述方法还包括:
8.一种交互式标定装置,其特征在于,所述交互式标定装置与路端的rtk设备、雷达、相机通信连接,所述交互式标定装置包括:
9.一种电子设备,其特征在于,包括有存储器,以及一个或者一个以上的程序,其中一个或者一个以上的程序存储于存储器中,且经配置由一个或者一个以上处理器执行所述一个或者一个以上的程序实现如权利要求1-7任一所述的方法。
10.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,该程序被处理器执行时实现如权利要求1-7任一所述的方法。
技术总结
本发明公开了一种路端多感知设备的交互式标定方法、装置及电子设备,该方法应用于交互式标定装置,所述交互式标定装置与路端的RTK设备、雷达、相机通信连接,该交互式标定方法包括:接收RTK设备发送的打点时间,以及接收所述雷达和所述相机基于所述打点时间获得的点云帧和图像帧;分别对所述点云帧和所述图像帧进行目标检测,获得所述RTK设备的探针点的检测结果;若所述检测结果表明所述探针点检测失败,生成打点失败的提示信息并发送至所述RTK设备,以使所述RTK设备重新进行打点。通过上述方案,解决了现有技术中路端多感知设备标定准确性较低、标定成本较高的技术问题。
技术研发人员:王俊权,曾帅
受保护的技术使用者:苏州艾氪英诺机器人科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!