基于偏振和数据融合的光场三维成像方法及系统
本发明属于三维成像检测中的光场显微三维成像检测,具体的说,涉及一种基于偏振和光场数据融合的光场三维成像方法及系统。
背景技术:
1、随着微纳传感、生物医药和精密加工制造等领域的快速发展,产品的几何尺寸等参数越来越小,几何参数对其性能影响较大,对这些产品的三维检测变得越来越重要。光场显微成像技术作为近些年出现的一种新型光学成像技术,能够在采集图像的过程中,同时也捕获物方光线的传播方向,实现对被测样品的快速三维重构和深度等信息的提取,被广泛应用于信息、物理、材料科学、生物科学等研究领域。虽然,光场显微成像技术具有诸多优点并得到了快速发展,但其仍存在无法同时得到较高横向分辨率和纵向分辨率的问题,这阻碍了光场显微成像技术的进一步推广的应用。
技术实现思路
1、本发明的目的在于提供一种基于偏振和数据融合的光场三维成像方法及系统,旨在解决现有傅里叶光场显微三维成像系统中的无法同时得到较高横向分辨率和纵向分辨率的技术问题。本发明引入偏振这一维度的信息,得到被测样品表面法向量,再将其和“粗糙”的点云数据融合,可以基于法向量求得该点所在区域深度z相对x和y方向的梯度变化,即斜率,进而显示出样品更多的细节信息,从而实现傅里叶光场显微成像系统最终三维重建结果纵向分辨率的提升。
2、为实现上述目的,本发明提供如下技术方案。
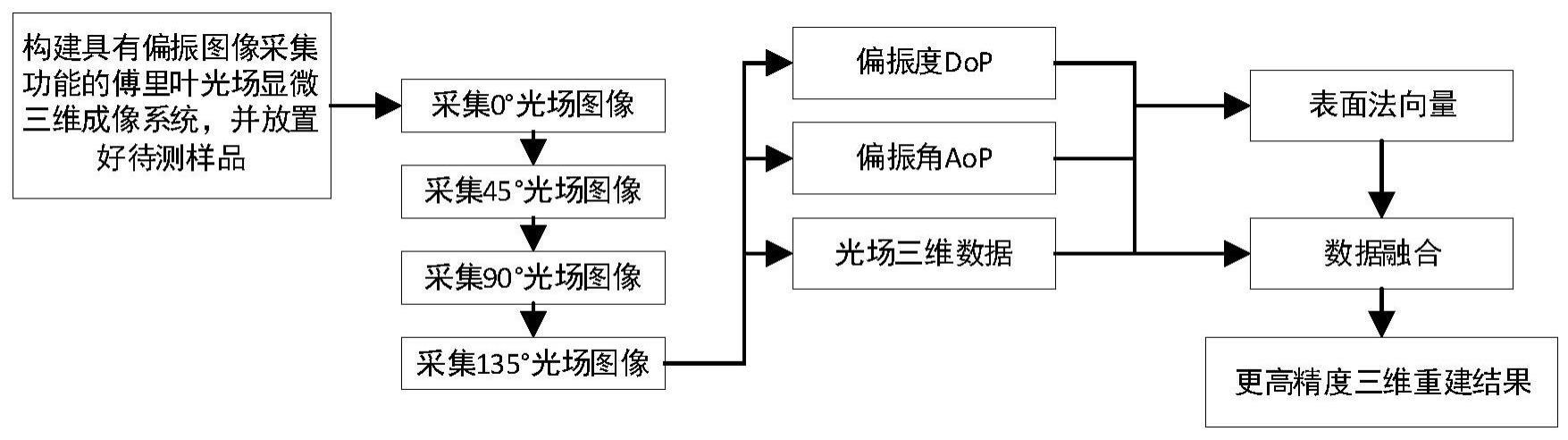
3、一种基于偏振和光场数据融合的光场三维成像方法,包括以下步骤:
4、步骤一,构建具有偏振图像采集功能的傅里叶光场显微三维成像系统;
5、步骤二,分别获取被测样本在同一条件下线偏振片处于若干不同角度时的偏振光场图片;
6、步骤三,针对获得的图像数据,分别计算样品的分辨率有限的光场三维点云数据、偏振角aop和偏振度dop数据;
7、步骤四,通过步骤三中的偏振数据和三维点云数据,准确获取基于偏振三维成像表面法向量,并将包含更细腻深度变化信息的物体表面法向量和光场三维点云数据融合,进一步拟合被测样本的三维点云数据,最终得到具有更高纵向分辨率和重建精度的光场显微三维成像结果。
8、本发明中,步骤一中,傅里叶光场显微三维成像系统通过在傅里叶光场显微成像系统前增加旋转偏振片,通过公用一套采集系统来实现对光场数据和偏振图像的采集功能。
9、本发明中,步骤二中,分别获取被测样本在同一条件下线偏振片处于0°、45°、90°
10、和135°时的四幅偏振光场图片。
11、本发明中,步骤三中,通过傅里叶光场重聚焦三维重建获得光场三维点云数据,通过采集的四个角度下的偏振图像计算偏振三维成像的表面法向量,偏振三维成像表面法向量获取结合了光场三维点云数据。
12、本发明中,步骤四中,通过southwell区域拟合方法拟合光场三维点云数据和偏振三维成像表面法向量,以提高最终重建的光场显微三维成像结果精度。
13、一种用于上述的光场三维成像方法的系统,其包含载物台、旋转偏振片、无限远矫正显微物镜、4f傅里叶中继系统、微透镜阵列和图像传感器;载物台、旋转偏振片、无限远矫正显微物镜、4f傅里叶中继系统、微透镜阵列和图像传感器同轴放置;被测样品被照明后,反射光线经过旋转偏振片、无限远矫正显微物镜、4f傅里叶中继系统和微透镜阵列后被图像传感器采集,采集的图像送入计算机中进行三维重建算法处理,得到最终融合后的高精度三维图。
14、和现有技术相比,本发明的有益效果在于:
15、(1)本发明装置结构简单,易集成,通过在傅里叶光场显微成像系统前增加旋转偏振片,使得系统具备了同时满足光场显微成像和偏振三维成像数据采集的能力,而且通过同一套光路,这有效避免了后期融合中图像匹配的问题。
16、(2)本发明中求解表面法向量时,通过融合点云数据来解决偏振法向量求解过程中存在天顶角和方位角多值性问题,得到确定的法向量。
17、(3)本发明中的融合算法涉及两个方面:(1)融合点云数据,解决偏振中天顶角和方位角多值性的问题;2)本文中偏振数据和光场点云数据融合提升纵向分辨率。这里的融合采用的法向量计算该点的z分别在x,y方向的梯度,即斜率来纠正点云z值,相当于给点云增加了梯度信息,因而可以得到更精细的纵向值分布,从而实现纵向分辨率的提升。有别于现有的直接通过法向量拟合出三维点云的偏振数据的融合算法。
18、(4)本发明在现有光场数据采集系统中引入了偏振信息,增加了可用于三维重建的信息维度;在引入偏振信息的同时,通过基于偏振和光场数据融合的傅里叶光场显微三维成像系统分辨率提升方法,提升了系统的分辨率,得到了更高精度的三维重建结果,克服了传统傅里叶光场三维显微成像系统无法同时得到较高横向分辨率和纵向分辨率的问题。
技术特征:
1.一种基于偏振和数据融合的光场三维成像方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的光场三维成像方法,其特征在于,步骤一中,通过在傅里叶光场显微成像系统前增加旋转偏振片来实现偏振图像采集功能。
3.根据权利要求1所述的光场三维成像方法,其特征在于,步骤二中,分别获取被测样本在同一条件下线偏振片处于0°、45°、90°和135°时的四幅偏振光场图片。
4.根据权利要求1所述的光场三维成像方法,其特征在于,步骤三中,通过傅里叶光场重聚焦三维重建获得光场三维点云数据,通过采集的四个角度下的偏振图像,计算偏振三维成像的表面法向量,偏振三维成像表面法向量获取结合了光场三维点云数据。
5.根据权利要求1所述的光场三维成像方法,其特征在于,步骤四中,通过southwell区域拟合方法拟合光场三维点云数据和偏振三维成像表面法向量,以提高最终重建的光场显微三维成像结果精度。
6.一种用于权利要求1所述的光场三维成像方法的系统,其特征在于,其包含载物台(1)、旋转偏振片(2)、无限远矫正显微物镜(3)、4f傅里叶中继系统(4)、微透镜阵列(5)和图像传感器(6);载物台(1)、旋转偏振片(2)、无限远矫正显微物镜(3)、4f傅里叶中继系统(4)、微透镜阵列(5)和图像传感器(6)同轴放置;被测样品被照明后,反射光线经过旋转偏振片(2)、无限远矫正显微物镜(3)、4f傅里叶中继系统(4)和微透镜阵列(5)后被图像传感器(6)采集,采集的图像送入计算机中进行三维重建算法处理,得到最终融合后的高精度三维图。
技术总结
本发明公开了一种基于偏振和数据融合的光场三维成像方法及系统;该方法包括以下步骤:步骤一,构建具有偏振图像采集功能的傅里叶光场显微三维成像系统;步骤二,分别获取被测样本在同一条件下线偏振片处于0°、45°、90°和135°时的四幅偏振光场图片;步骤三,针对获得的图像数据,分别计算恢复样品的光场三维点云数据和偏振三维成像的表面法向量;步骤四,使用基于偏振三维成像表面法向量和光场三维点云数据融合的算法,进一步拟合被测样本的三维点云数据,提高最终重建的光场显微三维成像结果精度。本发明适用于傅里叶光场显微成像系统,可以有效提升系统的分辨率和三维重建精度。
技术研发人员:孔令豹,石汶奇
受保护的技术使用者:复旦大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!