基于改进K矢量的星图识别方法、装置及相关设备
本发明实施例涉及星图识别,尤其涉及基于改进k矢量的星图识别方法、装置及相关设备。
背景技术:
1、星敏感器是一种自主、高精度天文导航设备,其广泛应用于航空航天航海领域,为载体提供姿态或位置信息。在这个过程中,首先需要对所拍摄星图进行星图识别,星图识别是根据图片中星点分布的相对位置关系,识别出星空中的恒星,从而执行接下来的姿态或位置解算。对于小视场角星敏感器而言,由于其参考星库庞大、星间角距较小,直接进行全天自主星图识别的难度比较高,会耗费较多时间。
2、传统的k矢量查找法可以针对三角法星图识别中查找角距速度过慢的问题进行改进,提高角距查找速度,然而在大视场的情况下,由于其存在着构造直线无法很好地映射星对角距表的问题,使得构造直线上不同区域所映射的星对角距数量不均匀,即构造直线上一部分间隔囊括较多的星对角距,而另一部分间隔则没有囊括星对角距,导致k矢量的快速查找的性能不能很好地发挥,查找速度受到一定限制。
技术实现思路
1、本发明实施例提供了星图识别方法、装置及相关设备,旨在解决现有技术中应用传统k矢量查找法进行星图识别时识别效果较差的问题。
2、第一方面,本发明实施例提供了一种基于改进k矢量的星图识别方法,其包括:
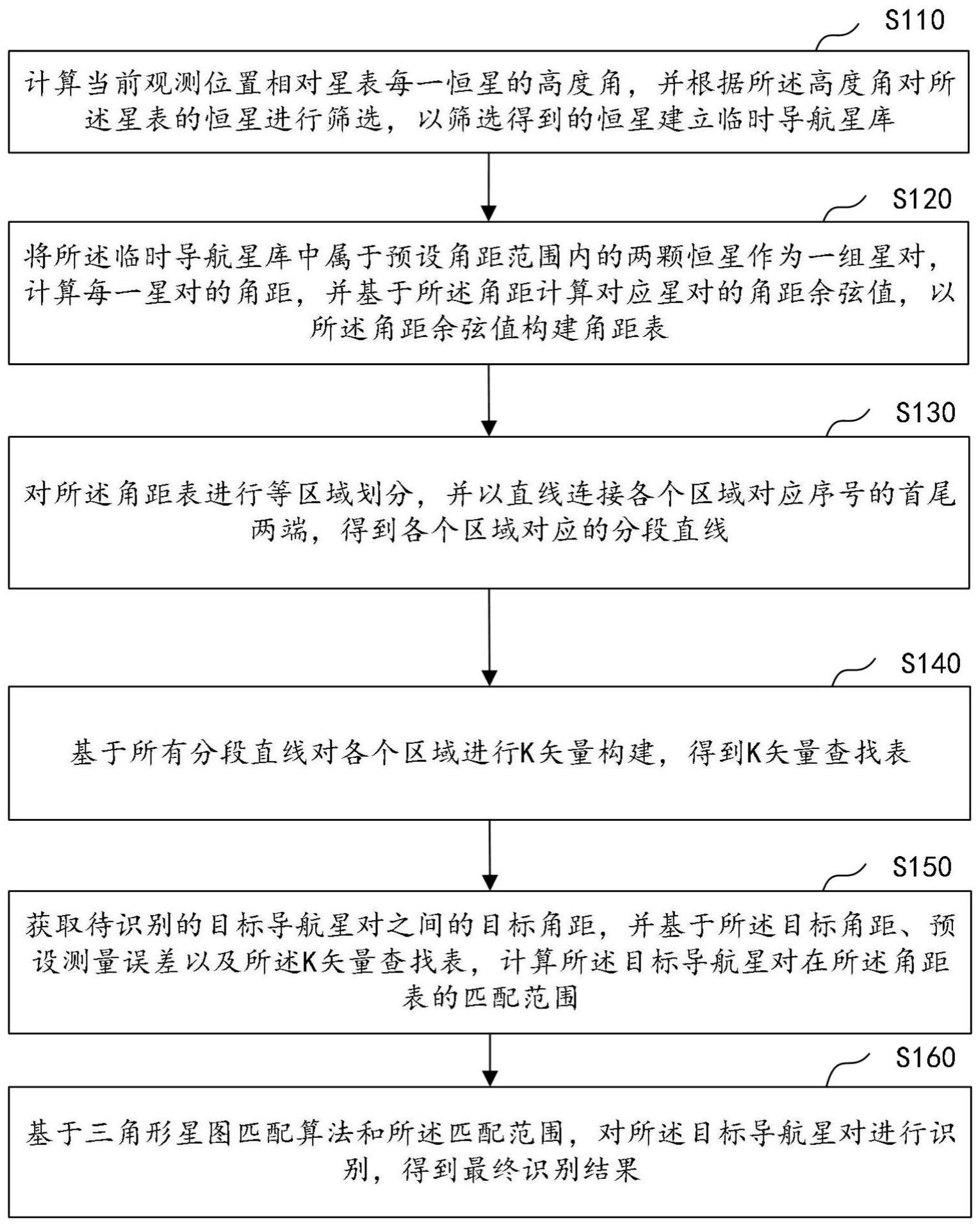
3、计算当前观测位置相对星表每一恒星的高度角,并根据所述高度角对所述星表的恒星进行筛选,以筛选得到的恒星建立临时导航星库;
4、将所述临时导航星库中属于预设角距范围内的两颗恒星作为一组星对,计算每一星对的角距,并基于所述角距计算对应星对的角距余弦值,以所述角距余弦值构建角距表;
5、对所述角距表进行等区域划分,并以直线连接各个区域对应序号的首尾两端,得到各个区域对应的分段直线;
6、基于所有分段直线对各个区域进行k矢量构建,得到k矢量查找表;
7、获取待识别的目标导航星对之间的目标角距,并基于所述目标角距、预设测量误差以及所述k矢量查找表,计算所述目标导航星对在所述角距表的匹配范围;
8、基于三角形星图匹配算法和所述匹配范围,对所述目标导航星对进行识别,得到最终识别结果。
9、第二方面,本发明实施例提供了一种基于改进k矢量的星图识别装置,包括:
10、临时星库构建模块,用于计算当前观测位置相对星表每一恒星的高度角,并根据所述高度角对所述星表的恒星进行筛选,以筛选得到的恒星建立临时导航星库;
11、角距表构建模块,用于将所述临时导航星库中属于预设角距范围内的两颗恒星作为一组星对,计算每一星对的角距,并基于所述角距计算对应星对的角距余弦值,以所述角距余弦值构建角距表;
12、区域划分模块,用于对所述角距表进行等区域划分,并以直线连接各个区域对应序号的首尾两端,得到各个区域对应的分段直线;
13、k矢量构建模块,用于基于所有分段直线对各个区域进行k矢量构建,得到k矢量查找表;
14、匹配范围计算模块,用于获取待识别的目标导航星对之间的目标角距,并基于所述目标角距、预设测量误差以及所述k矢量查找表,计算所述目标导航星对在所述角距表的匹配范围;
15、识别模块,用于基于三角形星图匹配算法和所述匹配范围,对所述目标导航星对进行识别,得到最终识别结果。
16、第三方面,本发明实施例又提供了一种计算机设备,其包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现上述第一方面所述的基于改进k矢量的星图识别方法。
17、第四方面,本发明实施例还提供了一种计算机可读存储介质,其中所述计算机可读存储介质存储有计算机程序,所述计算机程序当被处理器执行时使所述处理器执行上述第一方面所述的基于改进k矢量的星图识别方法。
18、本发明实施例提供了基于改进k矢量的星图识别方法、装置及相关设备。该方法包括计算当前观测位置相对星表每一恒星的高度角,并根据高度角对星表的恒星进行筛选,以筛选得到的恒星建立临时导航星库;将临时导航星库中属于预设角距范围内的两颗恒星作为一组星对,计算每一星对的角距,并基于角距计算对应星对的角距余弦值,以角距余弦值构建角距表;对角距表进行等区域划分,并以直线连接各个区域对应序号的首尾两端,得到各个区域对应的分段直线;基于所有分段直线对各个区域进行k矢量构建,得到k矢量查找表;获取待识别的目标导航星对之间的目标角距,并基述目标角距、预设测量误差以及、k矢量查找表,计算所述目标导航星对在所述角距表的匹配范围。本申请通过改进传统k矢量查找法,以多条分段直线拟合角距表的区域,构造分段直线对应的k矢量,多条分段直线均匀拟合角距表的星对数量,避免传统k矢量查找法以一条直线拟合整个角距表,无法较好映射角距表的问题,以多条分段直线映射不同区域的星对,映射数量均匀,缩小k矢量查找时直线对应的数据量,提高查找速度,减少内存占用,有效提升星图的识别速度。
技术特征:
1.基于改进k矢量的星图识别方法,其特征在于,包括:
2.根据权利要求1所述的星图识别方法,其特征在于,所述计算当前观测位置相对星表每一恒星的高度角,包括:
3.根据权利要求2所述的星图识别方法,其特征在于,所述根据所述时角对高度角正弦值进行计算,得到所述星表每一恒星的高度角,包括:
4.根据权利要求1所述的星图识别方法,其特征在于,所述基于所述角距计算对应星对的角距余弦值,基于所述角距余弦值构建角距表,包括:
5.根据权利要求4所述的星图识别方法,其特征在于,所述计算剩下的角距对应的角距余弦值,包括:
6.根据权利要求1所述的星图识别方法,其特征在于,所述基于所有分段直线对各个区域进行k矢量构建,得到k矢量查找表,包括:
7.根据权利要求1所述的星图识别方法,其特征在于,所述基于所述目标角距、预设测量误差以及所述k矢量查找表,计算所述目标导航星对在所述角距表的匹配范围,包括:
8.一种基于改进k矢量的星图识别装置,其特征在于,包括:
9.一种计算机设备,包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现如权利要求1至7中任一项所述的基于改进k矢量的星图识别方法。
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有计算机程序,所述计算机程序当被处理器执行时使所述处理器执行如权利要求1至7任一项所述的基于改进k矢量的星图识别方法。
技术总结
本发明公开了基于改进K矢量的星图识别方法、装置及相关设备。该方法包括计算当前观测位置相对星表每一恒星的高度角,并根据高度角对星表的恒星进行筛选,以筛选得到的恒星建立临时导航星库;将临时导航星库中属于预设角距范围内的任意两颗恒星作为一组星对,计算每一星对的角距,并基于角距计算的角距余弦值,以角距余弦值构建角距表;对角距表进行等区域划分,以直线连接各个区域对应序号的首尾两端,得到多条分段直线;构建K矢量查找表;获取待识别的目标导航星对之间的目标角距,并基述目标角距、预设测量误差以及、K矢量查找表,计算所述目标导航星对在所述角距表的匹配范围。该方法有效提升星图的识别速度。
技术研发人员:刘晓利,林俊填,汤其剑,古万煜,王三宏
受保护的技术使用者:深圳大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!