一种模块化微重力生物实验安全柜的制作方法
本发明属于地面微重力模拟和实验领域,尤其涉及一种模块化微重力生物实验安全柜。
背景技术:
1、地球上的生物的演化是在引力场中进行的,生理过程已经适应了重力作用。如果处于微重力环境,会出现一些生理上的变化以适应环境的改变。例如微重力环境引起人体生理功能紊乱,威胁航天员健康,阻碍人类的天空探索。在复杂的空间环境中,微重力对受试生物的影响尤为显著。空间站上的微重力水平约为10-4~10-6g,可以在受试生物个体、器官、组织、细胞、亚细胞和生化活性等各级水平上造成影响。
2、因太空微重力实验具有高成本、高风险、机会少、重复难、环境复杂、实验变量不易控制等特点,所以亟需在地面上研究微重力或模拟微重力效应,以实现对失重生物效应深入研究的要求。
3、现有技术已经使用回转器模拟微重力效应,其转速的设置一般凭借经验、前人的报道,缺乏理论基础。对于每一种生物的最佳转速仍然由经验确定,没有一个普适的公式去给每一种生物设置转速。对于随机定位仪双轴转速的设置,目前也缺少可靠的理论研究。
4、为了比较物种间对微重力响应的差异性,应考虑选择更广泛的模式生物进行研究,这就需要能同时装载多个不同物种样本的实验设备,以确定不同物种对微重力的最小响应时间和模拟微重力效应的转速范围。
技术实现思路
1、为解决上述技术问题,本发明提出了一种模块化微重力生物实验安全柜,旨在解决或改善上述技术问题中的至少之一。
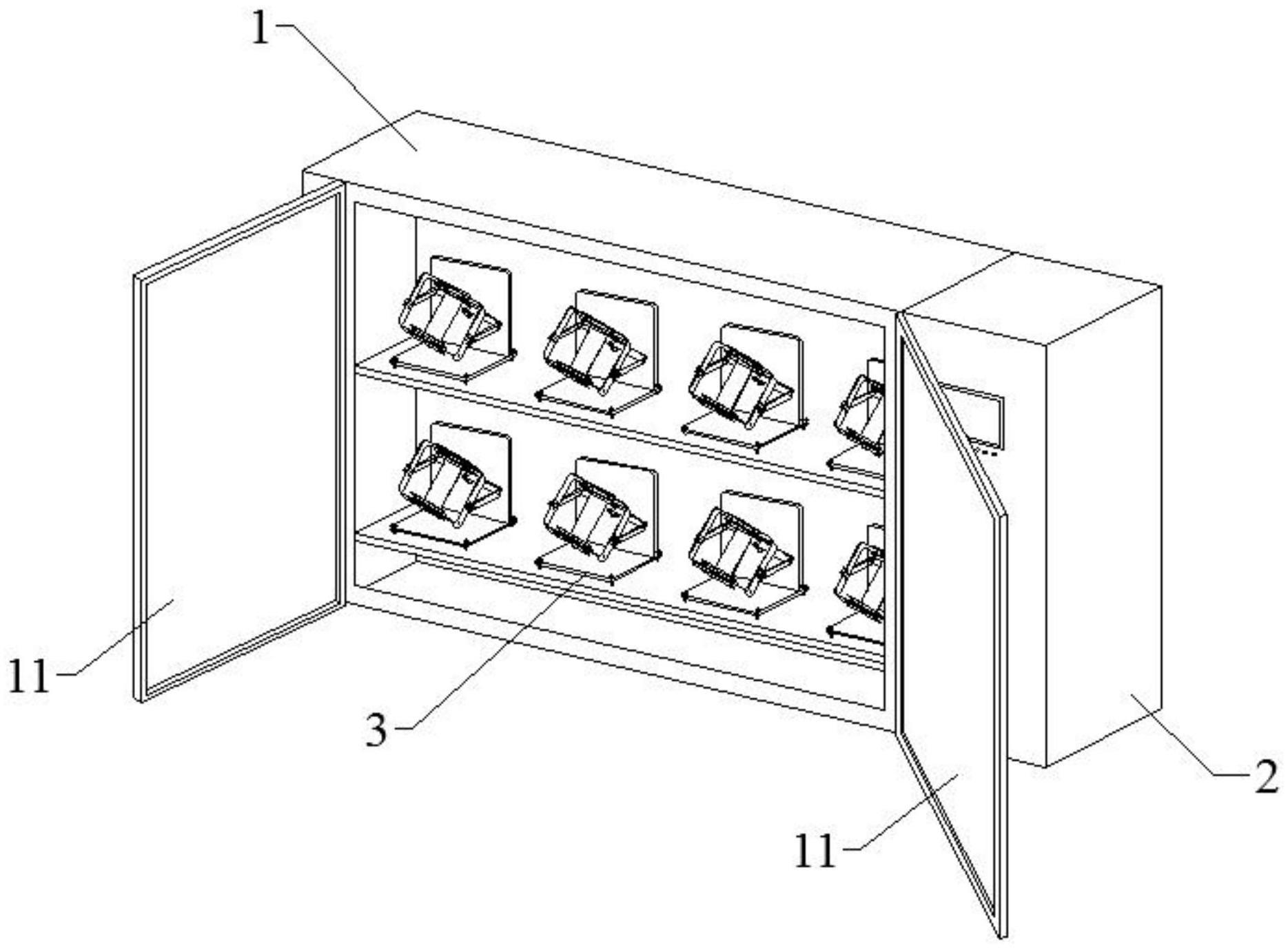
2、为实现上述目的,本发明提供了一种模块化微重力生物实验安全柜,包括实验柜和电气柜,所述实验柜内设有多个可模拟微重力效应的三维旋转仪,所述三维旋转仪包括第一框架、第二框架,所述第一框架通过一水平轴转动连接在一垂直的模块安装座上,所述第二框架转动连接于所述第一框架内,多个所述三维旋转仪中的第一框架通过同一个第一驱动机构驱动其同步旋转,所述第二框架通过第二驱动机构驱动其旋转,所述第二框架中设有用于夹持实验模块的夹持组件。
3、由上述技术方案可知,本发明提供了一种模块化微重力生物实验安全柜,能同时装载多个不同物种样本的实验模块,通过在相同的环境下,以相同的旋转速度进行微重力模拟,以确定不同物种对微重力的最小响应时间和模拟微重力效应的转速范围,为试验研究提供更为精准的数据支持。
4、优选地,所述三维旋转仪还包括模块基座,所述模块安装座垂直于所述模块基座后侧边缘。
5、优选地,所述模块安装座中心开孔,朝向所述模块基座前侧设有轴接座,另一侧设有旋转轴,所述旋转轴穿过所述轴接座与前端的所述第一框架的中部相接。
6、优选地,所述第二框架包括方形框体、连接于两个相对侧的承载底座、设置在所述承载底座两端的第一夹持组件和第二夹持组件,所述第一夹持组件和第二夹持组件分别与所述方形框体弹性连接。
7、优选地,所述第一夹持组件和/或所述第二夹持组件包括夹持板、调节板、连接杆和弹簧,所述夹持板位于所述方形框体内侧,所述调节板位于所述方形框体外侧,所述连接杆贯穿所述方形框体并连接所述夹持板和所述调节板,所述夹持板与所述方形框体之间的所述连接杆外套接所述弹簧。
8、优选地,所述第一夹持组件和所述第二夹持组件之间设有联动组件,所述联动组件包括连接于所述第一夹持组件的调节板上的第一连接臂、连接于所述第二夹持组件的调节板上的第二连接臂、以及同时与所述第一连接臂、所述第二连接臂啮合的齿轮,所述第一连接臂、所述第二连接臂和所述齿轮均位于所述承载底座底面,且所述齿轮转动连接在所述承载底座底部中央,所述第一连接臂、所述第二连接臂线性滑动于所述承载底座的底面。
9、优选地,所述第一连接臂、所述第二连接臂自由端均开有滑槽,所述承载底座的底面凸出有与所述滑槽配合的两个滑块,两所述滑槽分别与两所述滑块滑动连接。
10、优选地,该模块化微重力生物实验安全柜还包括环境调控组件,所述环境调控组件包括温控装置、加湿装置、排风装置、气体供应装置、辐照装置以及多个感应传感器。
11、优选地,所述环境调控组件还包括增压装置和抽真空装置。
12、优选地,所述感应传感器包括温度传感器、湿度传感器、红外传感器、光电传感器、气压传感器。
13、本发明提供了一种模块化的微重力生物实验安全柜,每个三维旋转仪作为一个独立的搭载模块,可以搭载不同的实验模块,各三维旋转仪中的夹持组件具有通用性,能够夹持不同大小和形状的实验模块。实验人员可以根据需要预设各实验模块的运行参数,或者设定相同的运行参数来对不同实验体进行实验验证,对于确定不同实验生物物种对微重力的最小响应时间和模拟微重力效应的转速范围提供了硬件支持。
技术特征:
1.一种模块化微重力生物实验安全柜,包括实验柜(1)和电气柜(2),其特征在于,所述实验柜(1)内设有多个可模拟微重力效应的三维旋转仪(3),所述三维旋转仪(3)包括第一框架(33)、第二框架(34),所述第一框架(33)通过一水平轴转动连接在一垂直的模块安装座(32)上,所述第二框架(34)转动连接于所述第一框架(33)内,多个所述三维旋转仪(3)中的第一框架(33)通过同一个第一驱动机构(4)驱动其同步旋转,所述第二框架(34)通过第二驱动机构(35)驱动其旋转,所述第二框架(34)中设有用于夹持实验模块的夹持组件。
2.根据权利要求1所述的模块化微重力生物实验安全柜,其特征在于,所述三维旋转仪(3)还包括模块基座(31),所述模块安装座(32)垂直于所述模块基座(31)后侧边缘。
3.根据权利要求2所述的模块化微重力生物实验安全柜,其特征在于,所述模块安装座(32)中心开孔,朝向所述模块基座(31)前侧设有轴接座(321),另一侧设有旋转轴(322),所述旋转轴(322)穿过所述轴接座(321)与前端的所述第一框架(33)的中部相接。
4.根据权利要求1所述的模块化微重力生物实验安全柜,其特征在于,所述第二框架(34)包括方形框体(341)、连接于两个相对侧的承载底座(342)、设置在所述承载底座(342)两端的第一夹持组件(343)和第二夹持组件(344),所述第一夹持组件(343)和第二夹持组件(344)分别与所述方形框体(341)弹性连接。
5.根据权利要求4所述的模块化微重力生物实验安全柜,其特征在于,所述第一夹持组件(343)和/或所述第二夹持组件(344)包括夹持板、调节板、连接杆和弹簧,所述夹持板位于所述方形框体(341)内侧,所述调节板位于所述方形框体(341)外侧,所述连接杆贯穿所述方形框体(341)并连接所述夹持板和所述调节板,所述夹持板与所述方形框体(341)之间的所述连接杆外套接所述弹簧。
6.根据权利要求5所述的模块化微重力生物实验安全柜,其特征在于,所述第一夹持组件(343)和所述第二夹持组件(344)之间设有联动组件,所述联动组件包括连接于所述第一夹持组件(343)的调节板上的第一连接臂(3435)、连接于所述第二夹持组件(344)的调节板上的第二连接臂(3445)、以及同时与所述第一连接臂(3435)、所述第二连接臂(3445)啮合的齿轮(345),所述第一连接臂(3435)、所述第二连接臂(3445)和所述齿轮(345)均位于所述承载底座(342)底面,且所述齿轮(345)转动连接在所述承载底座(342)底部中央,所述第一连接臂(3435)、所述第二连接臂(3445)线性滑动于所述承载底座(342)的底面。
7.根据权利要求6所述的模块化微重力生物实验安全柜,其特征在于,所述第一连接臂(3435)、所述第二连接臂(3445)自由端均开有滑槽,所述承载底座(342)的底面凸出有与所述滑槽配合的两个滑块,两所述滑槽分别与两所述滑块滑动连接。
8.根据权利要求1所述的模块化微重力生物实验安全柜,其特征在于,还包括环境调控组件,所述环境调控组件包括温控装置、加湿装置、排风装置、气体供应装置、辐照装置以及多个感应传感器。
9.根据权利要求8所述的模块化微重力生物实验安全柜,其特征在于,所述环境调控组件还包括增压装置和抽真空装置。
10.根据权利要求8所述的模块化微重力生物实验安全柜,其特征在于,所述感应传感器包括温度传感器、湿度传感器、红外传感器、光电传感器、气压传感器。
技术总结
本发明公开了一种模块化微重力生物实验安全柜,包括实验柜和电气柜,所述实验柜内设有多个可模拟微重力效应的三维旋转仪,所述三维旋转仪包括第一框架、第二框架,所述第一框架通过一水平轴转动连接在一垂直的模块安装座上,所述第二框架转动连接于所述第一框架内,多个所述三维旋转仪中的第一框架通过同一个第一驱动机构驱动其同步旋转,所述第二框架通过第二驱动机构驱动其旋转,所述第二框架中设有用于夹持实验模块的夹持组件。本发明的模块化微重力生物实验安全柜,能同时装载多个不同的实验模块,通过在相同的环境下,以相同的旋转速度进行微重力模拟,以确定不同样品对微重力的最小响应时间和模拟微重力效应的转速范围。
技术研发人员:奚晓鹏,迟海鹏,张怀东,邢希学
受保护的技术使用者:北京戴纳实验科技有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!