一种球形无人机的碰撞检测装置和方法
本发明涉及无人机碰撞检测领域,尤其涉及一种球形无人机的碰撞检测装置和方法。
背景技术:
1、无人机的使用范围越来越广泛,包括农业、测量、安防、物流等领域,但在实际应用中,无人机在空中行驶时很容易发生碰撞事故,造成严重的损失和安全隐患。目前,虽然无人机的避障和自主导航技术有了很大的发展,但仍存在一些无法避免的情况,例如突发状况、电力系统故障、人为因素等。因此,无人机碰撞检测技术是非常必要的。
2、无人机碰撞检测技术旨在实现无人机在运行过程中发生碰撞时及时识别、判断并采取避免碰撞的措施,以保障飞行安全。这种技术通常采用多种传感器进行数据采集,例如激光雷达、红外传感器、摄像头、超声波传感器等,过于依赖依赖外部设备,没有一个可以直接检测无人机碰撞的装置,无法实现无人机的自主感知,即使当前出现了球形无人机,也不能直接检测碰撞信息。
技术实现思路
1、为了解决现有技术中存在的上述技术问题,本发明提出了一种球形无人机的碰撞检测装置和方法,该装置利用压电材料感知无人机外壳碰撞时的变形,并通过搭载的计算机进行计算分析,从而实现对碰撞情况的感知与预测,其具体技术方案如下:
2、一种球形无人机的碰撞检测装置,包括:球形保护外壳以及设置在无人机本体上的机载主机,无人机本体位于球形保护外壳的中间空腔处,所述球形保护外壳的外形呈经线纬线交织的结构体,同时在交织的结构体内挖设线路槽,并在槽内埋设有无源pvdf压电材料;所述机载主机上设有数据信号采集模块、ros系统,所述无源pvdf压电材料通过导线信号连接所述数据信号采集模块,所述数据信号采集模块实时采集无人机的碰撞信号并进行放大处理,后通过stm32单片机将数据传递给ros系统进行实时滤波处理及碰撞分析。
3、进一步的,所述球形保护外壳使用tpu材料制作。
4、进一步的,所述数据信号采集模块采用tl064cd和lm324dt两级放大器将碰撞信号数据进行二级放大处理。
5、进一步的,所述ros系统使用butterworth算法进行信号的滤波处理。
6、一种球形无人机的碰撞检测方法,包括以下步骤:
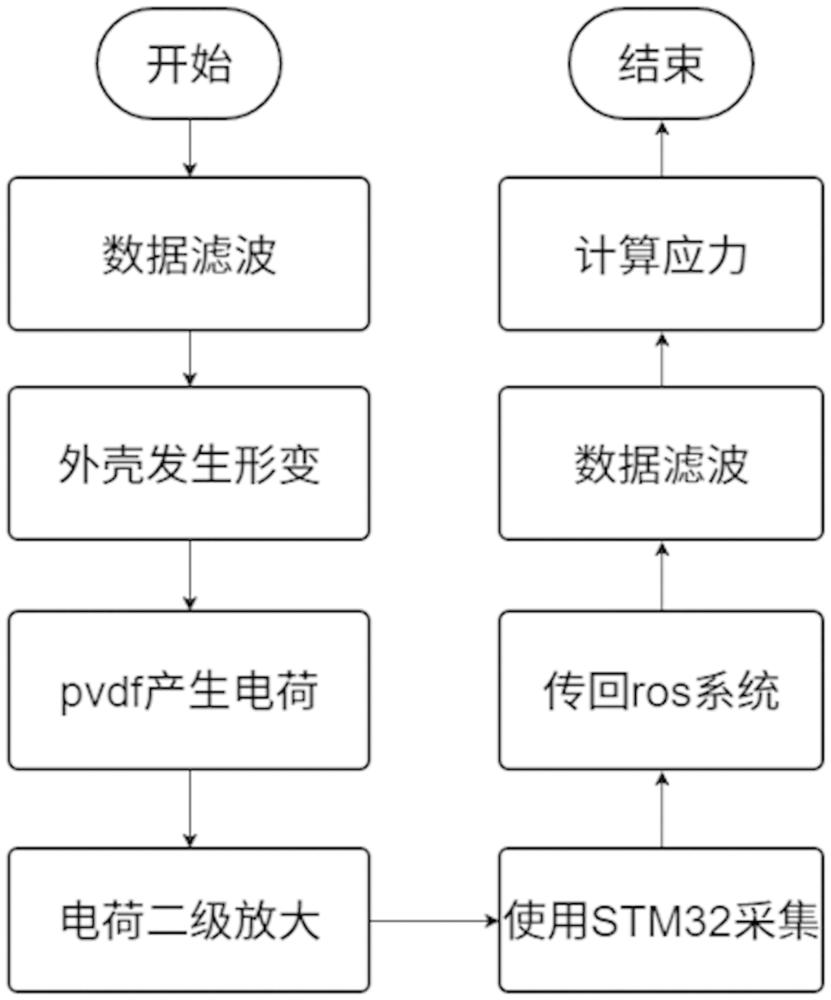
7、步骤一,无人机受到碰撞后,球形保护外壳产生形变使得埋设在球形保护外壳内的pvdf无源压电材料形变产生电荷;
8、步骤二,数据信号采集模块采集到电荷信号,进行二级放大后转变为电压信号,再将电压信号通过stm32单片机的串口传递到机载主机;
9、步骤三,机载主机使用ros系统对信号进行实时滤波处理和碰撞分析,检测出无人机碰撞位置和碰撞力。
10、进一步的,所述数据信号采集模块进行信号采集的频率为100hz,对采集数据进行分组,每个数组包含最近采集的10个数据。
11、进一步的,所述步骤三的对信号进行实时滤波处理,具体包括:
12、(1)设计butterworth滤波器,选择截止频率和滤波器阶数,确定butterworth滤波器的传递函数;
13、(2)将butterworth滤波器的传递函数进行频率变换,得到数字滤波器的传递函数;
14、(3)通过选择窗口函数,在频率域对数字滤波器的传递函数进行平滑化;
15、(4)将平滑化后的数字滤波器的传递函数进行逆变换,得到离散时间butterworth滤波器的差分方程;
16、(5)将滤波后的结果将作为当前数据的输出,并以ros话题的形式发布,供其他节点订阅使用。
17、进一步的,所述步骤三的碰撞分析,具体包括:
18、(a)数据采集:采集碰撞时的无源pvdf压电信号,并同时记录下碰撞位置和碰撞力的数据;
19、(b)数据预处理:将采集到的数据进行预处理,包括去噪、滤波操作;
20、(c)数据归一化:对数据进行归一化处理,将输入与输出数据映射到0到1之间的范围内;
21、(d)神经网络训练:使用归一化后的数据,采用bp神经网络进行训练,得到所需拟合的数据的权重系数;
22、(e)神经网络预测:使用训练好的bp神经网络模型,对新采集的无源pvdf压电信号进行预测,从而计算出对应的碰撞位置和碰撞力。
23、有益效果
24、1、本发明提高了无人机的安全性:球形外壳可以有效地保护无人机免受碰撞的影响,减少碰撞对无人机的损害,提高了其安全性。
25、2、本发明增强了无人机的适应性:由于球形外壳可以在各个方向上保护无人机,因此无人机可以更好地适应复杂的环境和工作任务。
26、3、本发明改善了无人机的稳定性:球形外壳的设计可以使无人机更加稳定,从而减少飞行时的抖动和晃动,提高无人机的准确性和控制性。
27、4、本发明增加了无人机的寿命:由于球形外壳可以减少无人机受到的碰撞损伤,从而可以延长无人机的使用寿命,减少了维修和更换的成本。
28、5、本发明提高了无人机的控制性:利用压电材料检测碰撞并计算碰撞的状况,可以让无人机更快速地响应并调整飞行轨迹,提高无人机的控制性。
技术特征:
1.一种球形无人机的碰撞检测装置,包括:球形保护外壳以及设置在无人机本体上的机载主机,无人机本体位于球形保护外壳的中间空腔处,其特征在于,所述球形保护外壳的外形呈经线纬线交织的结构体,同时在交织的结构体内挖设线路槽,并在槽内埋设有无源pvdf压电材料;所述机载主机上设有数据信号采集模块、ros系统,所述无源pvdf压电材料通过导线信号连接所述数据信号采集模块,所述数据信号采集模块实时采集无人机的碰撞信号并进行放大处理,后通过stm32单片机将数据传递给ros系统进行实时滤波处理及碰撞分析。
2.如权利要求1所述的一种球形无人机的碰撞检测装置,其特征在于,所述球形保护外壳使用tpu材料制作。
3.如权利要求1所述的一种球形无人机的碰撞检测装置,其特征在于,所述数据信号采集模块采用tl064cd和lm324dt两级放大器将碰撞信号数据进行二级放大处理。
4.如权利要求1所述的一种球形无人机的碰撞检测装置,其特征在于,所述ros系统使用butterworth算法进行信号的滤波处理。
5.一种采用权利要求1~4任意一项所述的一种球形无人机的碰撞检测装置的碰撞检测方法,其特征在于,包括以下步骤:
6.如权利要求5所述的一种球形无人机的碰撞检测方法,其特征在于,所述数据信号采集模块进行信号采集的频率为100hz,对采集数据进行分组,每个数组包含最近采集的10个数据。
7.如权利要求5所述的一种球形无人机的碰撞检测方法,其特征在于,所述步骤三的对信号进行实时滤波处理,具体包括:
8.如权利要求5所述的一种球形无人机的碰撞检测方法,其特征在于,所述步骤三的碰撞分析,具体包括:
技术总结
本发明涉及无人机碰撞检测领域,尤其涉及一种球形无人机的碰撞检测装置和方法,该装置包括球形保护外壳以及设置在无人机本体上的机载主机,无人机本体位于球形保护外壳的中间空腔处,其特征在于,所述球形保护外壳的外形呈经线纬线交织的结构体,同时在交织的结构体内挖设线路槽,并在槽内埋设有无源pvdf压电材料;所述机载主机上设有数据信号采集模块、ros系统,所述无源pvdf压电材料通过导线信号连接所述数据信号采集模块,所述数据信号采集模块实时采集无人机的碰撞信号并进行放大处理,后通过STM32单片机将数据传递给ros系统进行滤波处理及碰撞分析。本发明可以广泛应用于无人机领域,具有较高的应用价值。
技术研发人员:王进,扈传奇,于欢,郑植,张海运,陆国栋
受保护的技术使用者:浙江大学
技术研发日:
技术公布日:2024/3/12
- 还没有人留言评论。精彩留言会获得点赞!