一种水下目标探测系统及探测方法
本发明属于水下探测,尤其涉及一种水下目标探测系统及探测方法。
背景技术:
1、当前国内外水下探测设备大致分为两类:声学设备和光学设备。声学设备一般是多波束探测设备,它通过发射和接收声波来获取水下物体的形状和位置;声学设备需要与定位系统配合使用,定位系统一般是基于gps的无线电定位系统,提供声学设备的位置和姿态信息。光学设备一般是水下激光探测设备,它通过发射和接收激光来获取水下物体的形状和位置;光学设备也需要与定位系统配合使用,定位系统一般是基于惯性导航的定位系统,提供光学设备的位置和姿态信息。然而,当水下空间受限、环境复杂时,如水下洞穴环境等,gps信号容易丢失,导致无线电定位系统失效,声学设备无法获得准确的探测结果;另外,水下洞穴环境水体浑浊,含有大量的杂质和微生物,导致激光被吸收或散射,光学设备也无法获得清晰的探测结果。
2、因此,如何提供一种用于水下洞穴环境探测的水下目标探测系统及探测方法,是当前急需解决的一项技术问题。
技术实现思路
1、针对现有技术中存在的不足之处,本发明提供了一种水下目标探测系统及探测方法,通过摄像机获得的图像数据与声学探测器获得的坐标数据,输出目标探测数据,解决当前水下探测设备依赖定位系统导致探测结果不准确、不清晰的问题。
2、本发明提供一种水下目标探测系统,包括:
3、水密箱体,开设有第一探测口和第二探测口;
4、声学探测器,位于水密箱体内,对应安装于第一探测口,用于采集探测目标的坐标数据;
5、摄像机,位于水密箱体内,对应安装于第二探测口,用于采集水下环境的图像数据;
6、控制模块,其分别与声学探测器和摄像机通信连接,用于控制声学探测器和摄像头采集数据;
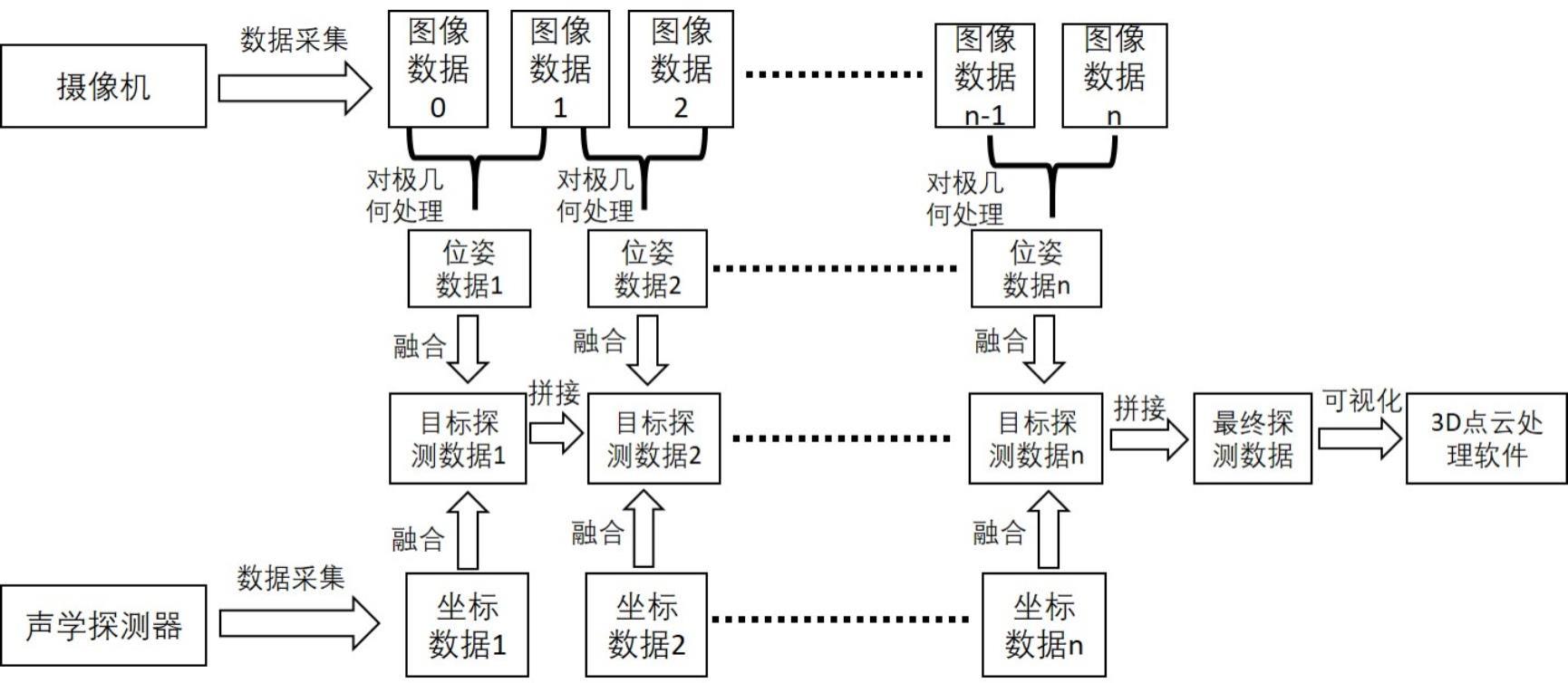
7、数据处理模块,其通信连接于声学探测器和摄像机,用于根据摄像机采集的图像数据得到摄像机移动的位姿数据,作为声学探测器移动的位姿数据;将声学探测器移动的位姿数据与声学探测器采集的探测目标的坐标数据融合,输出目标探测数据。
8、本技术方案提供的水下目标探测系统通过摄像机和声学探测器的配合,无需搭载额外的定位系统即可实现水下目标的探测,尤其对于水下洞穴等定位系统难以稳定运行的环境,本发明的水下目标探测系统能够有效地提高探测效率和精度。
9、在其中一些实施例中,控制模块控制摄像机先行采集图像数据,当摄像机获取第一张初始图像数据后,控制模块控制声学探测器启动,并控制声学探测器和摄像机同步采集数据。
10、在其中一些实施例中,数据处理模块按照摄像机采集的图像数据的时间序列对相邻两张图像数据进行对极几何处理,获得摄像机移动的位姿变换矩阵,作为摄像机移动的位姿数据。
11、在其中一些实施例中,水下目标探测系统还包括通信模块,控制模块通过通信模块通信连接于声学探测器和摄像机,数据处理模块通过通信模块通信连接于声学探测器和摄像机。本技术方案通过通信模块实现声学探测器和摄像机的数据传输和指令控制,提高了水下目标探测系统的集成性和可控性。
12、在其中一些实施例中,水下目标探测系统还包括用于提供电能供应的电源设备。本技术方案通过电源设备保证水下目标探测系统的稳定运行,避免因电力不足而导致的失效或故障。
13、除此,本发明还提供了一种水下目标探测方法,采用如上所述的水下目标探测系统进行水下目标的探测,包括以下步骤:
14、数据采集步骤,启动摄像机采集水下环境的图像数据,摄像机获取第一张初始图像数据后,声学探测器立即启动并与摄像机同步开始采集数据;
15、数据处理步骤,对采集的图像数据进行处理,得到摄像机移动的位姿数据,作为声学探测器移动的位姿数据;
16、数据融合步骤,将声学探测器采集的探测目标的坐标数据与声学探测器移动的位姿数据进行融合,输出目标探测数据;
17、数据拼接步骤,将得到的目标探测数据按时间顺序进行存储,得到最终探测数据。
18、在其中一些实施例中,数据处理步骤中,按照采集的图像数据的时间序列对相邻两张图像数据进行对极几何处理,生成摄像机移动的位姿变换矩阵e,作为摄像机移动的位姿数据。
19、在其中一些实施例中,通过对极几何处理获得位姿变换矩阵e的步骤为:对采集图像数据的摄像机进行标定,获得摄像机的内参矩阵k;将图像数据按照时间顺序进行排列,依次对相邻的两个图像数据进行特征点匹配,结合相机内参矩阵k,获得前后两个图像数据的坐标转换关系,计算获得位姿变换矩阵e,前后两个图像数据的坐标转换关系的表达式为:
20、(1);
21、其中,k为摄像机内参矩阵;相邻两个图像数据中,时间在前的图像数据记为第一图像数据,时间在后的图像数据记为第二图像数据,u和v分别为特征点在第一图像数据中的横坐标和纵坐标,u'和v'分别为同一特征点在第二图像数据中的横坐标和纵坐标。
22、在其中一些实施例中,数据融合步骤中,目标探测数据根据公式(2)计算获得,公式(2)的表达式为:
23、(2);
24、其中,u为目标探测数据,s为声学探测器获得的探测目标的坐标数据。
25、在其中一些实施例中,水下目标探测方法还包括可视化处理步骤,可视化处理步骤包括:通过3d点云处理软件对最终探测数据进行可视化处理。
26、基于上述方案,本发明实施例中的一种水下目标探测系统及探测方法能够通过摄像机和声学探测器的配合,无需搭载额外的定位系统即可实现水下目标的探测,尤其对于水下洞穴等定位系统难以稳定运行的环境,本发明的水下目标探测系统能够有效地提高探测效率和精度。
技术特征:
1.一种水下目标探测系统,其特征在于,包括:
2.根据权利要求1所述的水下目标探测系统,其特征在于,控制模块控制摄像机先行采集图像数据,当摄像机获取第一张初始图像数据后,控制模块控制声学探测器启动,并控制声学探测器和摄像机同步采集数据。
3.根据权利要求1所述的水下目标探测系统,其特征在于,数据处理模块按照摄像机采集的图像数据的时间序列对相邻两张图像数据进行对极几何处理,获得摄像机移动的位姿变换矩阵,作为摄像机移动的位姿数据。
4.根据权利要求1所述的水下目标探测系统,其特征在于,水下目标探测系统还包括通信模块,控制模块通过通信模块通信连接于声学探测器和摄像机,数据处理模块通过通信模块通信连接于声学探测器和摄像机。
5.根据权利要求1或4所述的水下目标探测系统,其特征在于,水下目标探测系统还包括用于提供电能供应的电源设备。
6.一种水下目标探测方法,其特征在于,采用权利要求1-5任一项所述的水下目标探测系统进行水下目标的探测,包括以下步骤:
7.根据权利要求6所述的水下目标探测方法,其特征在于,数据处理步骤中,按照采集的图像数据的时间序列对相邻两张图像数据进行对极几何处理,生成摄像机移动的位姿变换矩阵e,作为摄像机移动的位姿数据。
8.根据权利要求6或7所述的水下目标探测方法,其特征在于,通过对极几何处理获得位姿变换矩阵e的步骤为:对采集图像数据的摄像机进行标定,获得摄像机的内参矩阵k;将图像数据按照时间顺序进行排列,依次对相邻的两个图像数据进行特征点匹配,结合相机内参矩阵k,获得前后两个图像数据的坐标转换关系,计算获得位姿变换矩阵e,前后两个图像数据的坐标转换关系的表达式为:
9.根据权利要求6所述的水下目标探测方法,其特征在于,数据融合步骤中,目标探测数据根据公式(2)计算获得,公式(2)的表达式为:
10.根据权利要求6所述的水下目标探测方法,其特征在于,水下目标探测方法还包括可视化处理步骤,可视化处理步骤包括:通过3d点云处理软件对最终探测数据进行可视化处理。
技术总结
本发明涉及一种水下目标探测系统及探测方法,属于水下探测技术领域,该水下目标探测系统包括水密箱体、声学探测器、摄像机、控制模块和数据处理模块;其中,水密箱体开设有第一探测口和第二探测口;声学探测器位于水密箱体内,对应安装于第一探测口,用于采集探测目标的坐标数据;摄像机位于水密箱体内,对应安装于第二探测口,用于采集水下环境的图像数据;控制模块分别与声学探测器和摄像机通信连接,用于控制声学探测器和摄像头采集数据;数据处理模块通信连接于声学探测器和摄像机。本发明通过摄像机和声学探测器的配合,无需搭载额外的定位系统即可实现水下目标的探测,尤其对于水下洞穴等环境,能够有效地提高探测效率和精度。
技术研发人员:卢泽宇,郭金家,李萌
受保护的技术使用者:中国海洋大学
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!