形状测量方法、装置、设备及存储介质与流程
本发明涉及数据处理,尤其涉及一种形状测量方法、装置、设备及存储介质。
背景技术:
1、目前,物体形状测量技术主要包括接触式测量及非接触式测量两类。非接触式测量技术包括两类:视觉照相三维测量、激光三维测量。照相三维测量系统具有测量速度快、测量密度高的优点。激光测量系统具有测量精度高的优点。
2、视觉测量主要可分为:被动测量和主动测量两种方法。主动测量方法大概可以分为两类:time-of-flight(tof)激光测量和结构光测量。tof激光测量方法通过计算光的飞行时间获取物体的三维形状。结构光测量是通过投影仪将编码的光投影在被测物体上,同时相机捕获重建这些场景。结构光测量更能满足工业生产对精度的要求。目前,市场上存在很多有形状测量需求,但是在测量物体形状时,准确度高的结构光测量形状成本过高,无法满足市场上小成本形状测量的需求。
3、上述内容仅用于辅助理解本发明的技术方案,并不代表承认上述内容是现有技术。
技术实现思路
1、本发明的主要目的在于提供一种形状测量方法,旨在解决现有技术小成本的人工测量准确度不够高,准确度高的结构光测量形状成本过高,无法满足市场上小成本形状测量的需求的技术问题。
2、为实现上述目的,本发明提供了一种形状测量方法,所述形状测量方法应用于形状测量系统,所述形状测量系统包括编码器、若干个激光测距仪和平面旋转机构,所述激光测距仪固定连接在所述平面旋转机构外围,所述编码器固定连接在所述平面旋转机构内部,所述编码器和所述激光测距仪可跟随所述平面旋转机构进行旋转;
3、所述形状测量方法,包括:
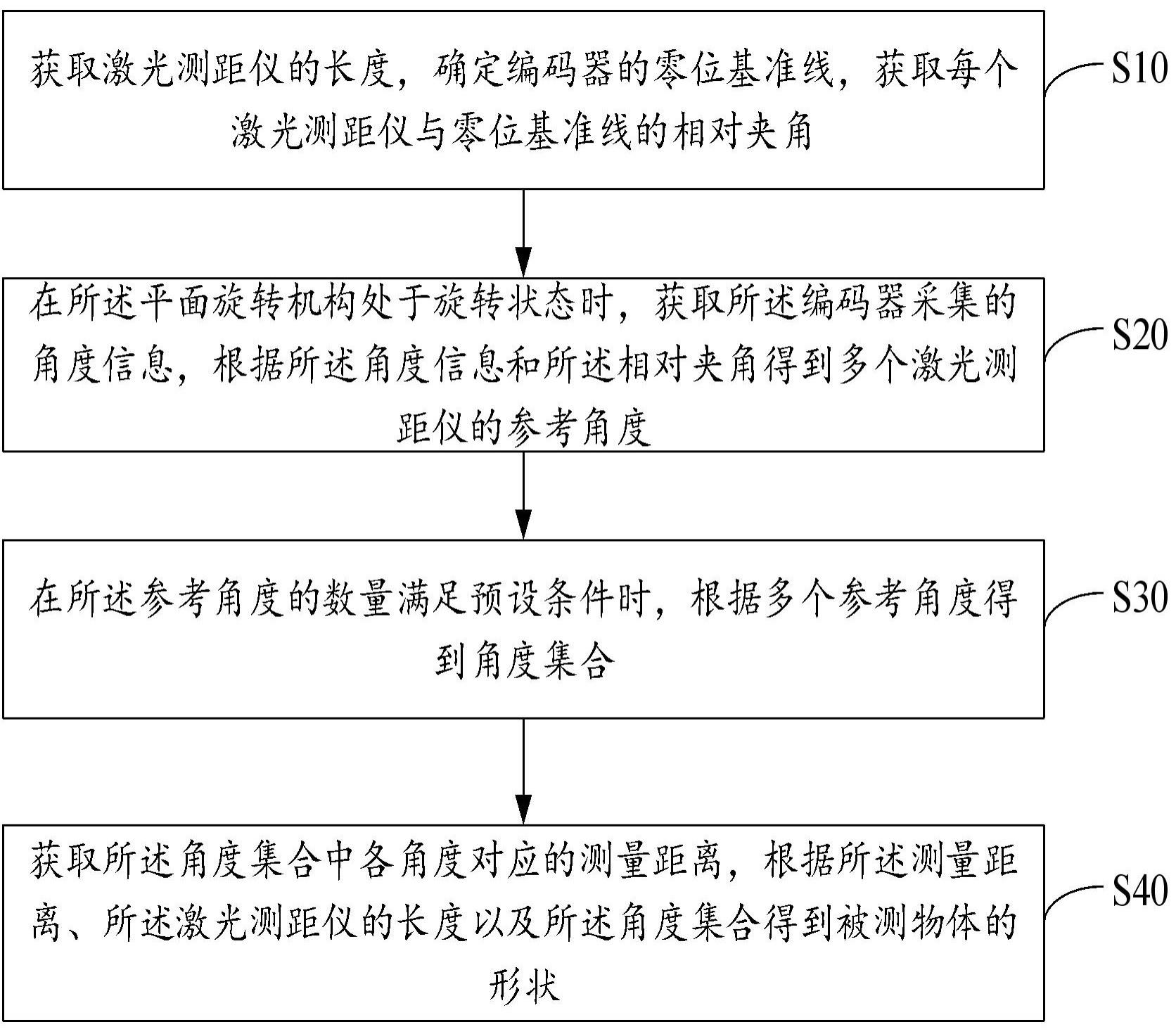
4、获取激光测距仪的长度,确定所述编码器的零位基准线,获取每个激光测距仪与所述零位基准线的相对夹角;
5、在所述平面旋转机构处于旋转状态时,获取所述编码器采集的角度信息,根据所述角度信息和所述相对夹角得到多个激光测距仪的参考角度;
6、在所述参考角度的数量满足预设条件时,根据多个参考角度得到角度集合;
7、获取所述角度集合中各角度对应的测量距离,根据所述测量距离、所述激光测距仪的长度以及所述角度集合得到被测物体的形状。
8、可选地,所述在所述平面旋转机构处于旋转状态时,获取编码器采集的角度信息,根据所述角度信息和所述相对夹角得到多个激光测距仪的参考角度,包括:
9、在所述平面旋转机构处于旋转状态时,获取当前时刻所述编码器零位基准线的偏移角度;
10、根据所述偏移角度和每个激光测距仪与所述零位基准线的相对夹角得到当前时刻激光测距仪的参考角度。
11、可选地,所述在所述参考角度的数量满足预设条件时,根据多个参考角度得到角度集合,包括:
12、不断旋转所述平面旋转机构得到多个参考角度,判断所述参考角度的角度数量是否大于数量阈值;
13、在所述参考角度的角度数量大于数量阈值时,判断所述参考角度的角度是否满足角度范围阈值;
14、在所述参考角度的角度满足角度范围阈值时,根据所述多个参考角度得到角度集合。
15、可选地,所述获取所述角度集合中各角度对应的测量距离,根据所述测量距离、所述激光测距仪的长度以及所述角度集合得到被测物体的形状,包括:
16、以所述编码器的零位基准线为轴线,以所述平面旋转机构的中心为原点建立参考坐标系;
17、获取所述角度集合中各角度对应的激光测距仪测量的测量距离;
18、根据所述测量距离和所述激光测距仪的长度相加得到所述角度集合中各角度对应的参考距离;
19、通过三角函数对所述参考距离、所述参考角度确定被测物体在所述参考坐标系中的参考坐标;
20、根据所述被测物体在所述参考坐标系中的多个参考坐标得到所述被测物体的形状。
21、可选地,所述根据所述被测物体在所述参考坐标系中的多个参考坐标得到所述被测物体的形状,包括:
22、根据所述被测物体在所述参考坐标系中的多个参考坐标得到平面多项式;
23、对所述平面多项式进行曲线拟合,得到拟合结果,根据所述拟合结果得到所述被测物体的形状。
24、可选地,所述形状测量系统还包括垂直运动机构,所述垂直运动机构用于驱动所述平面旋转机构垂直于所述参考坐标系上下运动;
25、所述获取所述角度集合中各角度对应的测量距离,根据所述测量距离、所述激光测距仪的长度以及所述角度集合得到被测物体的形状之后,还包括:
26、在所述平面旋转机构通过所述垂直运动机构上下移动时,采集在不同垂直距离下的参考坐标;
27、根据所述平面旋转机构在不同垂直距离下的参考坐标得到三维坐标集合;
28、根据所述三维坐标集合得到所述被测物体的三维形状。
29、可选地,所述根据所述三维坐标集合得到所述被测物体的三维形状,包括:
30、根据所述三维坐标集合得到多个三维空间点;
31、根据所述三维空间点进行曲面拟合,得到所述被测物体的三维曲面;
32、根据所述三维曲面确定所述被测物体的三维形状。
33、此外,为实现上述目的,本发明还提出一种形状测量装置,所述形状测量装置包括:
34、获取模块,用于获取激光测距仪的长度,确定编码器的零位基准线,获取每个激光测距仪与零位基准线的相对夹角;
35、所述获取模块,还用于在平面旋转机构处于旋转状态时,获取所述编码器采集的角度信息,根据所述角度信息和所述相对夹角得到多个激光测距仪的参考角度;
36、所述获取模块,还用于在所述参考角度的数量满足预设条件时,根据多个参考角度得到角度集合;
37、测量模块,用于获取所述角度集合中各角度对应的测量距离,根据所述测量距离、所述激光测距仪的长度以及所述角度集合得到被测物体的形状。
38、此外,为实现上述目的,本发明还提出一种形状测量设备,所述形状测量设备包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的形状测量程序,所述形状测量程序配置为实现如上文所述的形状测量方法的步骤。
39、此外,为实现上述目的,本发明还提出一种存储介质,所述存储介质上存储有形状测量程序,所述形状测量程序被处理器执行时实现如上文所述的形状测量方法的步骤。
40、本发明通过不断旋转激光测距仪,得到激光测距仪在测量距离时对应的角度,激光测距仪采集被测物体在多个不同角度下的距离,根据各个角度的测量距离进行曲线拟合,得到被测物体的形状,从而通过低成本的激光测距仪和编码器准确得到物体的形状。
技术特征:
1.一种形状测量方法,其特征在于,所述形状测量方法应用于形状测量系统,所述形状测量系统包括编码器、若干个激光测距仪和平面旋转机构,所述激光测距仪固定连接在所述平面旋转机构外围,所述编码器固定连接在所述平面旋转机构内部,所述编码器和所述激光测距仪可跟随所述平面旋转机构进行旋转;
2.如权利要求1所述的形状测量方法,其特征在于,所述在所述平面旋转机构处于旋转状态时,获取编码器采集的角度信息,根据所述角度信息和所述相对夹角得到多个激光测距仪的参考角度,包括:
3.如权利要求1所述的形状测量方法,其特征在于,所述在所述参考角度的数量满足预设条件时,根据多个参考角度得到角度集合,包括:
4.如权利要求1所述的形状测量方法,其特征在于,所述获取所述角度集合中各角度对应的测量距离,根据所述测量距离、所述激光测距仪的长度以及所述角度集合得到被测物体的形状,包括:
5.如权利要求4所述的形状测量方法,其特征在于,所述根据所述被测物体在所述参考坐标系中的多个参考坐标得到所述被测物体的形状,包括:
6.如权利要求4所述的形状测量方法,其特征在于,所述形状测量系统还包括垂直运动机构,所述垂直运动机构用于驱动所述平面旋转机构垂直于所述参考坐标系上下运动;
7.如权利要求6所述的形状测量方法,其特征在于,所述根据所述三维坐标集合得到所述被测物体的三维形状,包括:
8.一种形状测量装置,其特征在于,所述形状测量装置包括:
9.一种形状测量设备,其特征在于,所述设备包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的形状测量程序,所述形状测量程序配置为实现如权利要求1至7中任一项所述的形状测量方法。
10.一种存储介质,其特征在于,所述存储介质上存储有形状测量程序,所述形状测量程序被处理器执行时实现如权利要求1至7任一项所述的形状测量方法。
技术总结
本发明属于数据处理技术领域,公开了一种形状测量方法、装置、设备及存储介质;该方法包括:获取每个激光测距仪与零位基准线的相对夹角;获取编码器采集的角度信息,根据角度信息和相对夹角得到多个激光测距仪的参考角度;在参考角度的数量满足预设条件时,根据多个参考角度得到角度集合;获取角度集合中各角度对应的测量距离,根据测量距离、激光测距仪的长度以及角度集合得到被测物体的形状;本发明通过不断旋转激光测距仪,得到激光测距仪在测量距离时对应的角度,激光测距仪采集被测物体在多个不同角度下的距离,根据各个角度的测量距离进行曲线拟合,得到被测物体的形状,从而通过低成本的激光测距仪和编码器准确得到物体的形状。
技术研发人员:李林峰,汪杨刚,姚垚
受保护的技术使用者:武汉海微科技有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!