一种水库库容测绘方法与流程
本发明涉及库容测绘,尤其涉及一种水库库容测绘方法。
背景技术:
1、水库是一种拦洪蓄水和调节水流的水利工程建筑物,可以利用来灌溉、发电、防洪和养鱼,是人类社会重要的水资源储存、供应及调节设施,水库库容测绘和三维结构分析对于实现防洪排涝、保护饮用水质、实现可持续发展和增强能源安全等方面有着至关重要的作用。目前,现有的水库库容测绘方法多基于地面测量、遥感影像或水文测验等技术,存在的问题如下:
2、(一)传统的测量方法需要消耗大量的人力物力,且操作时间较长,难以处理大规模水利工程的库容数据,时间成本较高。
3、(二)传统方法测得的测量数据受到外界环境和人为干扰的影响,其测量精度难以把控。
4、(三)传统测量方法只能获取水库表面和底部的高程数据,无法反映水库内部结构和物理属性的变化,测量结果不够全面。
技术实现思路
1、针对上述现有技术的缺点,本发明的目的是提供一种水库库容测绘方法,以解决现有技术中的一个或多个问题。
2、为实现上述目的,本发明的技术方案如下:
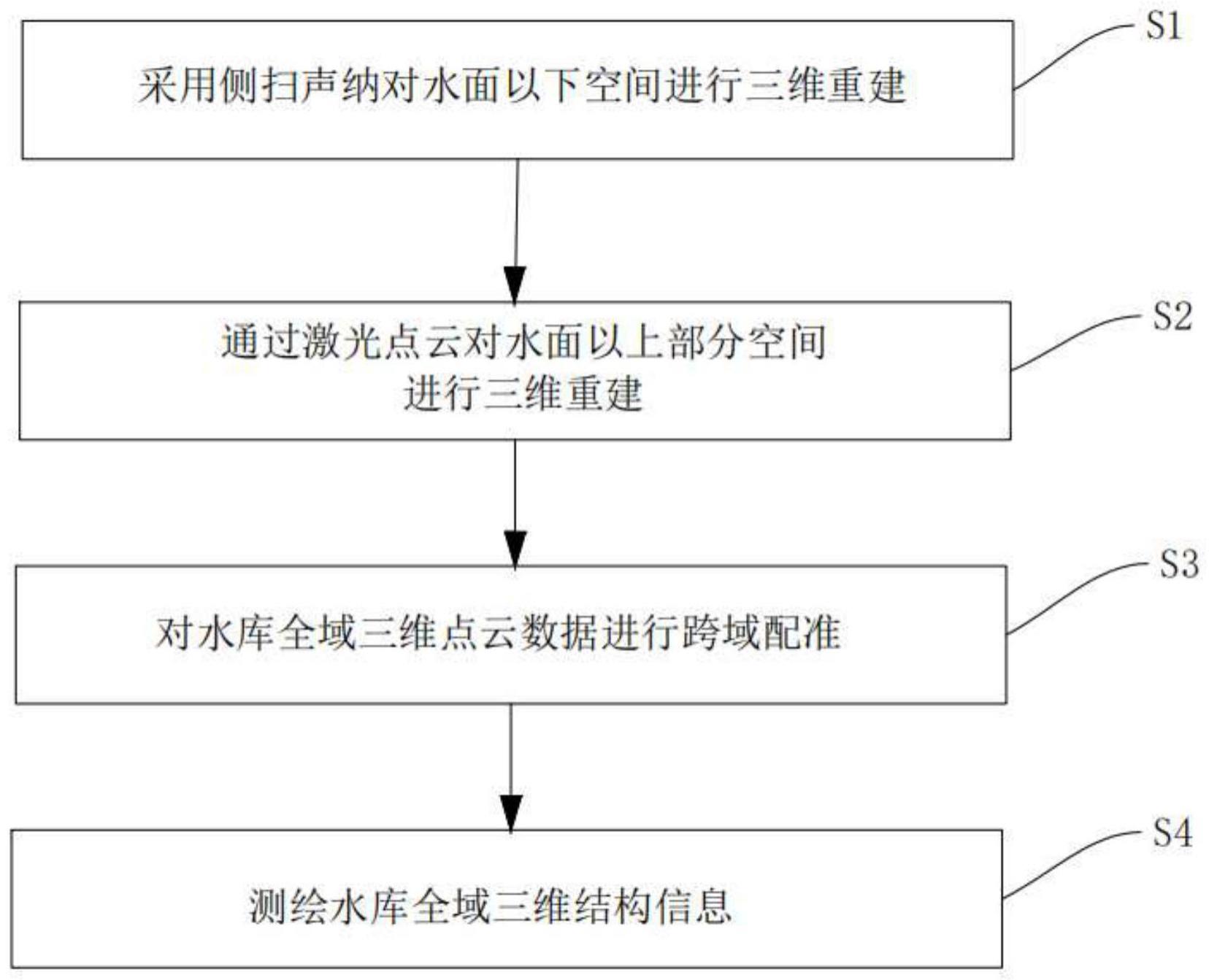
3、一种水库库容测绘方法,包括以下步骤:
4、采用侧扫声纳对水面以下空间进行三维重建;
5、通过激光点云对水面以上空间进行三维重建;
6、对水库全域三维点云数据进行跨域配准;
7、测绘水库全域三维结构信息。
8、进一步的,所述采用侧扫声纳对水面以下空间进行三维重建包括步骤如下:
9、构建水下全空间深度分布图;
10、根据水下全空间深度分布图计算目标真实三维坐标;
11、将目标真实三维坐标生成三维点云数据。
12、进一步的,所述构建水下全空间深度分布图包括步骤如下:
13、对原始侧扫声纳数据进行数据增强;
14、根据侧扫声纳工作原理构建几何关系图;
15、通过几何关系获取目标深度dt与非目标深度db;
16、根据获得的目标深度dt与非目标深度db,构建水下全空间的深度图d(x,y)。
17、进一步的,所述计算目标真实三维坐标包括步骤如下:
18、对三维世界坐标系与侧扫声纳传感器坐标系转换;
19、对侧扫声纳传感器坐标系与图像坐标系转换;
20、对图像坐标系与像素坐标系转换;
21、获取像素坐标系与三维世界坐标系之间的转换关系。
22、进一步的,所述通过激光点云对水面以上空间进行三维重建包括步骤如下:
23、获取初始三维激光点云数据;
24、对点云数据预处理;
25、根据预处理后的点云数据进行点云三维重建。
26、进一步的,所述对点云数据预处理包括步骤如下:
27、对点云数据进行滤波;
28、计算点云之间的坐标转换关系;
29、将点云空间网格化,遍历所有网格以获取新点云;
30、采用影像匹配技术,对新点云数据进行着色处理。
31、进一步的,所述跨域配准包括步骤如下:
32、对异源点云数据进行归一化处理;
33、将两个点云图分割为超体素,并提取超体素的邻接图,并以超体素的esf描述符作为局部特征;
34、根据超体素及其邻接图进行图构造;
35、采用fgm方法进行图优化;
36、估计两个点云之间的6dof刚性变换。
37、进一步的,所述图构造包括步骤如下:
38、以超体素的所有质心点构造图节点,度量图节点的相似性;
39、以超体素的之间的相邻关系作为图边缘,度量图边缘的相似性。
40、进一步的,所述图节点相似性度量公式为:
41、kp=dp/||dp||∞
42、其中,kp是图节点相似度矩阵,dp是描述符的第i行和描述符的第j行之间的平方距离;
43、所述图边缘相似性度量公式为:
44、kq=dq/||dq||∞
45、其中,kq是图边缘相似度矩阵,dq表示描述符的第i行和描述符第j行之间的平方距离。
46、进一步的,所述刚性变换包括步骤如下:
47、利用随机一致性采样算法去除离群点;
48、采用icp算法精炼点云之间的区域,获取最终点云配准结果。
49、与现有技术相比,本发明的有益技术效果如下
50、(一)通过利用侧扫声纳和激光雷达探测水库立体空间的三维结构信息,实现全自动化的水利库容测绘。
51、(二)通过采用非局部均值滤波、海底线检测、分段线性增益补偿以及地理编码的方法对侧扫声纳原始数据进行增强,以解决侧扫声纳的图像噪声和畸变问题,并明暗恢复形状方法完成对水下地形的三维重建。
52、(三)通过对三维激光点云数据双边滤波、体素下采样以及点云着色等预处理,去除数据噪声,在保证点云整体几何特征不变的情况下,降低点云的密度,进而可以降低相关处理的数据量和算法复杂度,同时增加颜色属性信息,提供更好的可视化效果,便于地物识别与应用。
53、(四)通过一种宏观和微观结构的跨域点云配准方法,实现了对声纳点云数据和激光点云数据的跨域配准,较好地还原了水库三维空间结构
技术特征:
1.一种水库库容测绘方法,其特征在于,包括以下步骤:
2.如权利要求1所述的一种水库库容测绘方法,其特征在于:所述采用侧扫声纳对水面以下空间进行三维重建包括步骤如下:
3.如权利要求2所述的一种水库库容测绘方法,其特征在于:所述构建水下全空间深度分布图包括步骤如下:
4.如权利要求3所述的一种水库库容测绘方法,其特征在于:所述计算目标真实三维坐标包括步骤如下:
5.如权利要求4所述的一种水库库容测绘方法,其特征在于:所述通过激光点云对水面以上空间进行三维重建包括步骤如下:
6.如权利要求5所述的一种水库库容测绘方法,其特征在于:所述对点云数据预处理包括步骤如下:
7.如权利要求6所述的一种水库库容测绘方法,其特征在于:所述跨域配准包括步骤如下:
8.如权利要求7所述的一种水库库容测绘方法,其特征在于:所述图构造包括步骤如下:
9.如权利要求8所述的一种水库库容测绘方法,其特征在于:
10.如权利要求9所述的一种水库库容测绘方法,其特征在于:所述刚性变换包括步骤如下:
技术总结
本发明涉及一种水库库容测绘方法,包括以下步骤:采用侧扫声纳对水面以下空间进行三维重建;通过激光点云对水面以上空间进行三维重建;对水库全域三维点云数据进行跨域配准;测绘水库全域三维结构信息。通过利用侧扫声纳和激光雷达探测水库立体空间的三维结构信息,实现全自动化的水利库容测绘。通过对三维激光点云数据双边滤波、体素下采样以及点云着色等预处理,去除数据噪声,在保证点云整体几何特征不变的情况下,降低点云的密度,进而可以降低相关处理的数据量和算法复杂度,同时增加颜色属性信息,提供更好的可视化效果,便于地物识别与应用。
技术研发人员:白宗宝,王敏,汪正涛,尤梦晨,张嘉鹏
受保护的技术使用者:无锡卡尔曼导航技术有限公司南京技术中心
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!