一种基于半球谐振陀螺的隧道线型检测方法及系统
本发明属于隧道检测定位领域,具体涉及一种基于半球谐振陀螺的隧道线型检测方法。
背景技术:
1、随着交通基础设施的快速发展,隧道检测对于公路隧道养护和维修至关重要。因此研发高效的隧道检测车并推广应用不仅对于提高公路隧道养护管理的规范化具有重要作用,也对推动我国交通事业的发展具有重要意义。
2、隧道检测车利用惯导系统和光电编码器实现对隧道线型的检测,其技术难度之一就是如何实现隧道检测车在轨道中的精确位置,并要求单点定位精度要达到毫米级。同时目前市场上检测车辆售价过高是其推广的主要阻力,而要实现高精度定位则需要使用成本高昂的陀螺,降低成本是解决问题的关键。因此如何在降低成本的同时实现提高检测精准度是目前亟待解决的问题。
技术实现思路
1、本发明提供一种基于半球谐振陀螺的隧道线型检测方法及系统,能够解决现有技术成本过高,检测存在误差的问题,本发明能够更轻松实现对隧道线型的精确定位,提高检测精确度。
2、为达到上述目的,本发明采用以下技术方案:
3、一种基于半球谐振陀螺的隧道线型检测方法,包括以下步骤:
4、s1:获取隧道检测车的初始状态信息,并建立坐标系;所述初始状态信息为隧道检测车进入隧道时的瞬间状态信息;
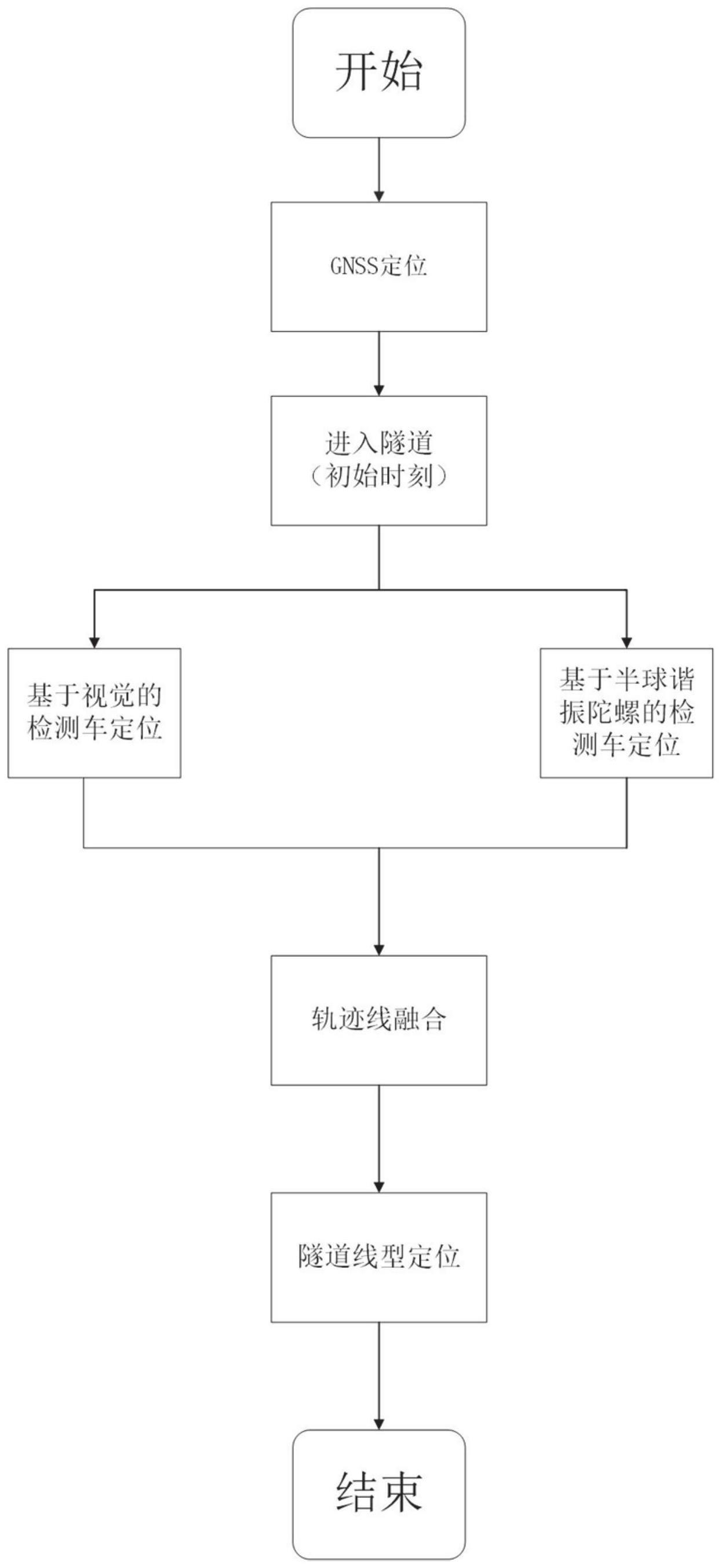
5、s2:基于所述初始状态信息和坐标系,通过半球谐振陀螺和加速度计获取隧道检测车的当前状态信息并更新姿态矩阵,根据当前状态信息和姿态矩阵得到基于半球谐振陀螺的隧道检测车行驶轨迹;同时,获取隧道检测车的前后两张路面图像,对所述前后两张路面图像依次进行预处理和重叠区域检测得到重叠区域,对所述重叠区域进行中间黄色车道线检测和同名特征点提取,得到基于视觉的隧道检测车行驶轨迹;
6、s3:根据所述基于半球谐振陀螺的隧道检测车行驶轨迹和基于视觉的隧道检测车行驶轨迹,采用轨迹加权融合算法,得到融合后行驶轨迹,根据融合后行驶轨迹以及隧道检测车质心坐标和中间黄色车道线之间的相对位置关系,确定隧道线型。
7、进一步地,s1中,坐标系包括:全局坐标系、车辆坐标系、地球坐标系和地心惯性坐标系。
8、进一步地,s2中,所述当前状态信息包括角速度信息、姿态角信息和比力。
9、进一步地,s2中,所述根据当前状态信息和姿态矩阵得到基于半球谐振陀螺的隧道检测车行驶轨迹,具体包括以下步骤:
10、隧道检测车行驶过程中,根据姿态角信息和比力建立惯性导航微分方程,并通过姿态矩阵得到方向余弦矩阵,结合所述方向余弦矩阵和惯性导航微分方程得到姿态信息;
11、隧道检测车行驶过程中,通过角速度信息获得隧道检测车在坐标系上的速度分量,对所述速度分量积分,得到位置更新微分方程,对所述位置更新微分方程进行积分,得到位置坐标;
12、根据每一时刻的姿态信息和位置坐标得到基于半球谐振陀螺的隧道检测车行驶轨迹。
13、进一步地,s2中,所述图像预处理包括以下步骤:
14、对所述路面图像依次进行畸变矫正、高斯滤波和灰度转换处理,然后依次进行直方图均衡化和二值化处理,得到处理后的路面图像。
15、进一步地,s2中,所述重叠区域检测采用频域匹配的方法进行检测。
16、进一步地,s2中,所述对所述重叠区域进行中间黄色车道线检测和同名特征点提取,包括以下步骤:
17、在重叠区域中设置感兴趣区域,采用canny边缘检测提取所述感兴趣区域的图像轮廓信息,对所述图像轮廓信息采用梯度过滤器进行过滤,然后依次采用霍夫变换和ransac算法,得到中间黄色车道线;
18、在所述中间黄色车道线提取至少两个同名特征点,并根据所述同名特征点和所述隧道检测车的初始状态信息得到基于视觉的隧道检测车行驶轨迹。
19、进一步地,s3中,根据所述基于半球谐振陀螺的隧道检测车行驶轨迹和基于视觉的隧道检测车行驶轨迹包括:对所述基于半球谐振陀螺的隧道检测车行驶轨迹和基于视觉的隧道检测车行驶轨迹进行空间配准和时间配准。
20、进一步地,s3中,所述根据融合后行驶轨迹以及隧道检测车和中间黄色车道线之间的相对位置关系,确定隧道线型,包括以下步骤:
21、提取所述融合后行驶轨迹中的关键点,并对所述重叠区域进行车道线检测和提取特征点坐标;
22、根据所述特征点坐标和隧道检测车质心坐标的相对位置关系,将所述关键点的坐标转换为中间黄色车道线坐标,将每一时刻的中间黄色车道线坐标组合即可确定隧道线型。
23、一种基于半球谐振陀螺的隧道线型检测系统,包括:
24、信息获取模块,用于获取隧道检测车的初始状态信息,并建立坐标系;所述初始状态信息为隧道检测车进入隧道时的瞬间状态信息;
25、轨迹分析模块,用于基于所述初始状态信息和坐标系,通过半球谐振陀螺和加速度计获取隧道检测车的当前状态信息并更新姿态矩阵,根据当前状态信息和姿态矩阵得到基于半球谐振陀螺的隧道检测车行驶轨迹;同时,获取隧道检测车的前后两张路面图像,对所述前后两张路面图像依次进行预处理和重叠区域检测得到重叠区域,对所述重叠区域进行中间黄色车道线检测和同名特征点提取,得到基于视觉的隧道检测车行驶轨迹;
26、轨迹融合模块,用于根据所述基于半球谐振陀螺的隧道检测车行驶轨迹和基于视觉的隧道检测车行驶轨迹,采用轨迹加权融合算法,得到融合后行驶轨迹,根据融合后行驶轨迹以及隧道检测车质心坐标和中间黄色车道线之间的相对位置关系,确定隧道线型。
27、与现有技术相比,本发明具有以下有益效果:
28、由于隧道的屏蔽作用,隧道检测车无法在隧道内获得gnss数据,此时检测车辆需要以gnss信号丢失前最后一刻的位姿数据为基准进行车辆的位置与姿态推算,因此本发明提供一种基于半球谐振陀螺的隧道线型检测方法,用低成本高精度的半球谐振陀螺仪和加速度计所采集的数据建立惯导系统的微分方程,求解每一时刻的微分方程,得到隧道检测车的姿态信息和位置坐标并建立检测车的行驶轨迹;通过检测车前后的单目相机拍摄到的路面重叠区域中的车道线,根据车道线中特征点与检测车辆质心位置的坐标对应关系,类推出隧道检测车的行驶轨迹。理论上,惯导系统得到的位置坐标由积分得到,存在累计误差,且基于图像处理得到的数据易受到外界环境干扰存在误差。因此,将两种方法得到的行驶轨迹进行加权融合,并根据中间黄色车道线与检测车的相对位置关系可得到隧道线型在地球坐标系下的具体位置,完成隧道线型的高精度检测。通过上述内容可知本发明采用低成本高精度的半球谐振陀螺,并提出一种将采用半球谐振陀螺的惯导系统和视觉系统相融合的隧道线型检测系统,可大幅降低成本并提高检测精准度,推动隧道检测车辆的大范围推广,为公路隧道提供基础数据,促进公路隧道快速发展。
技术特征:
1.一种基于半球谐振陀螺的隧道线型检测方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种基于半球谐振陀螺的隧道线型检测方法,其特征在于,s1中,坐标系包括:全局坐标系、车辆坐标系、地球坐标系和地心惯性坐标系。
3.根据权利要求1所述的一种基于半球谐振陀螺的隧道线型检测方法,其特征在于,s2中,所述当前状态信息包括角速度信息、姿态角信息和比力。
4.根据权利要求3所述的一种基于半球谐振陀螺的隧道线型检测方法,其特征在于,s2中,所述根据当前状态信息和姿态矩阵得到基于半球谐振陀螺的隧道检测车行驶轨迹,具体包括以下步骤:
5.根据权利要求1所述的一种基于半球谐振陀螺的隧道线型检测方法,其特征在于,s2中,所述图像预处理包括以下步骤:
6.根据权利要求1所述的一种基于半球谐振陀螺的隧道线型检测方法,其特征在于,s2中,所述重叠区域检测采用频域匹配的方法进行检测。
7.根据权利要求1所述的一种基于半球谐振陀螺的隧道线型检测方法,其特征在于,s2中,所述对所述重叠区域进行中间黄色车道线检测和同名特征点提取,包括以下步骤:
8.根据权利要求1所述的一种基于半球谐振陀螺的隧道线型检测方法,其特征在于,s3中,根据所述基于半球谐振陀螺的隧道检测车行驶轨迹和基于视觉的隧道检测车行驶轨迹包括:对所述基于半球谐振陀螺的隧道检测车行驶轨迹和基于视觉的隧道检测车行驶轨迹进行空间配准和时间配准。
9.根据权利要求1所述的一种基于半球谐振陀螺的隧道线型检测方法,其特征在于,s3中,所述根据融合后行驶轨迹以及隧道检测车和中间黄色车道线之间的相对位置关系,确定隧道线型,包括以下步骤:
10.一种基于半球谐振陀螺的隧道线型检测系统,其特征在于,包括:
技术总结
本发明提供一种基于半球谐振陀螺的隧道线型检测方法及系统,涉及隧道检测定位领域,包括以下步骤:获取隧道检测车的初始状态信息,并建立坐标系;基于所述初始状态信息和坐标系,检测基于半球谐振陀螺的隧道检测车行驶轨迹和基于视觉的隧道检测车行驶轨迹;根据所述基于半球谐振陀螺的隧道检测车行驶轨迹和基于视觉的隧道检测车行驶轨迹,采用轨迹加权融合算法,得到融合后行驶轨迹,根据融合后行驶轨迹确定隧道线型。采用本发明能够降低检测成本并且完成隧道线型的高精度检测。
技术研发人员:王建锋,张传坤,隽鸿科,任佳婧,肖艳鹏,孙圆,刘晟,董金卫,刘臻玮
受保护的技术使用者:长安大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!