用于动态道路几何形状建模与导航的系统和方法与流程
本公开一般涉及交通工具导航。
背景技术:
1、随着技术不断进步,能够在道路上导航的全自主交通工具的目标即将实现。自主交通工具可能需要考虑多种因素,并且基于那些因素做出适当判定,以安全且准确地到达预计目的地。例如,自主交通工具可能需要处理和解释视觉信息(例如从摄像机所捕获的信息),并且还可能使用从其它来源(例如从gps装置、速度传感器、加速计、悬架传感器等)所获得的信息。同时,为了导航到目的地,自主交通工具还可能需要标识它在特定道路内的位置(例如多车道道路内的特定车道),与其它交通工具并排导航,避开障碍物和行人,观察交通信号和标志,并且在适当十字路口或立交桥从一个道路行驶到另一个道路。利用和解释由自主交通工具在交通工具行驶到其目的地时所收集的大量信息造成许多设计挑战。自主交通工具可能需要分析、访问和/或存储的大量数据(例如所捕获的图像数据、地图数据、gps数据、传感器数据等)造成实际上可能限制或者甚至不利地影响自主导航的挑战。此外,如果自主交通工具依靠传统绘图技术进行导航,则存储和更新地图所需的大量数据造成巨大挑战。
技术实现思路
1、按照本公开的实施例提供了用于交通工具导航的系统和方法。
2、在实施例中,一种用于导航交通工具的系统可以包括至少一个处理器,所述至少一个处理器包括电路和存储器。存储器可以包括指令,所述指令当由电路执行时促使所述至少一个处理器:接收由主交通工具上的摄像机获取的多个图像;基于对多个图像的分析,生成主交通工具前方的路段的道路几何形状模型;基于对多个图像中的至少一个的分析,确定主交通工具的取向的一个或多个指示符;并且基于主交通工具的取向的一个或多个指示符和主交通工具前方的路段的道路几何形状模型,生成一个或多个输出信号,所述一个或多个输出信号配置成引起主交通工具上的可移动前灯的指向方向的改变。
3、在实施例中,一种用于导航主交通工具的方法可以包括:接收由主交通工具上的摄像机获取的多个图像;基于对多个图像的分析,生成主交通工具前方的路段的道路几何形状模型;基于对多个图像中的至少一个的分析,确定主交通工具的取向的一个或多个指示符;并且基于主交通工具的取向的一个或多个指示符和主交通工具前方的路段的道路几何形状模型,生成一个或多个输出信号,所述一个或多个输出信号配置成引起主交通工具上的可移动前灯的指向方向的改变。
4、在实施例中,一种用于导航交通工具的系统可包括至少一个处理器,所述至少一个处理器包括电路和存储器。存储器可以包括指令,所述指令当由电路执行时促使所述至少一个处理器:接收由主交通工具上的摄像机获取的多个图像;基于对多个图像的分析,生成主交通工具前方的路段的道路几何形状模型;并且基于道路几何形状模型和主交通工具的一个或多个操作特性,生成用于引起由主交通工具要采取的一个或多个导航动作的输出。
5、在实施例中,一种用于导航主交通工具的方法可以包括:接收由主交通工具上的摄像机获取的多个图像;基于对多个图像的分析,生成主交通工具前方的路段的道路几何形状模型;并且基于道路几何形状模型和主交通工具的一个或多个操作特性,生成用于引起由主交通工具要采取的一个或多个导航动作的输出。
6、在实施例中,一种用于导航交通工具的系统可包括至少一个处理器,所述至少一个处理器包括电路和存储器。存储器可以包括指令,所述指令当由电路执行时促使所述至少一个处理器:接收由主交通工具上的摄像机获取的多个图像;基于对多个图像的分析,生成主交通工具前方的路段的道路几何形状模型;基于对道路几何形状模型的分析,检测在道路几何形状模型中表示的局部地平线的存在,其中局部地平线与在局部地平线之外的遮挡路段相关联;并且基于道路几何形状模型并响应于由道路几何形状模型表示的所检测到的局部地平线,生成用于引起由主交通工具要采取的一个或多个导航动作的输出。
7、在实施例中,一种用于导航主交通工具的方法可以包括:接收由主交通工具上的摄像机获取的多个图像;基于对多个图像的分析,生成主交通工具前方的路段的道路几何形状模型;基于对道路几何形状模型的分析,检测在道路几何形状模型中表示的局部地平线的存在,其中局部地平线与在局部地平线之外的遮挡路段相关联;并且基于道路几何形状模型并响应于由道路几何形状模型表示的所检测到的局部地平线,生成用于引起由主交通工具要采取的一个或多个导航动作的输出。
8、按照其它所公开实施例,非暂时性计算机可读存储介质可以存储程序指令,所述程序指令由至少一个处理器执行并执行本文所述的任何方法。
9、前面的一般描述和下面的详细描述仅是示例性和解释性的,并不是限制权利要求。
技术特征:
1.一种用于导航主交通工具的系统,所述系统包括:
2.根据权利要求1所述的系统,其中,用于生成所述道路几何形状模型的对所述多个图像的分析包括运动中结构分析。
3.根据权利要求1所述的系统,其中,所述道路几何形状模型是三维道路几何形状模型。
4.根据权利要求1所述的系统,其中,所述道路几何形状模型包括与所述路段相关联的路面的三维表示。
5.根据权利要求1所述的系统,其中,所述道路几何形状模型包括与所述路段相关联的一个或多个车道标记的三维表示。
6.根据权利要求1所述的系统,其中,所述道路几何形状模型包括与所述路段相关联的一个或多个道路边缘的三维表示。
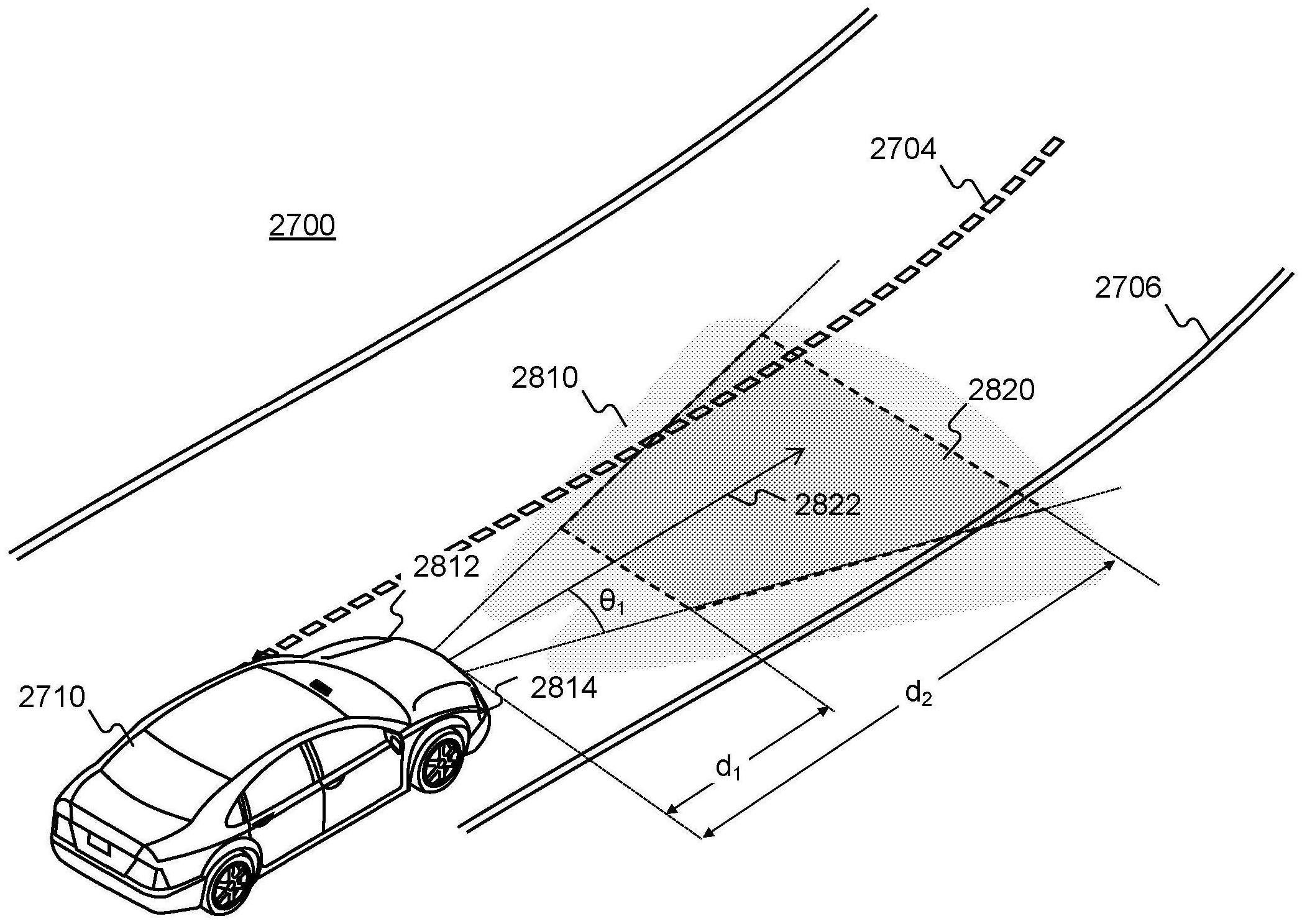
7.根据权利要求1所述的系统,其中,所述一个或多个输出信号还基于所述主交通工具前方的预定感兴趣区域而生成。
8.根据权利要求7所述的系统,其中,所述预定感兴趣区域包括所述路段的目标区域,所述目标区域要由所述主交通工具上的一个或多个可移动前灯照亮。
9.根据权利要求7所述的系统,其中,所述预定感兴趣区域至少由最小和最大纵向距离指定。
10.根据权利要求7所述的系统,其中,所述预定感兴趣区域包括所述主交通工具前方从5米至150米的区域。
11.根据权利要求10所述的系统,其中,所述预定感兴趣区域包括所述主交通工具前方从20米至130米的区域。
12.根据权利要求10所述的系统,其中,所述预定感兴趣区域包括所述主交通工具前方从30米至100米的区域。
13.根据权利要求7所述的系统,其中,所述预定感兴趣区域至少由左和右偏航角指定。
14.根据权利要求13所述的系统,其中,所述预定感兴趣区域还由最小和最大纵向距离指定。
15.根据权利要求7所述的系统,其中,所述一个或多个输出信号指示所述可移动前灯的指向方向。
16.根据权利要求15所述的系统,其中,所述指向方向相对于所述主交通工具的取向方向的所述一个或多个指示符或相对于所述摄像机的指向方向而被参考。
17.根据权利要求7所述的系统,其中,所述一个或多个输出信号指定相对于所述主交通工具的取向方向的所述一个或多个指示符所参考的照亮区域的一个或多个边界,以用于向所述预定感兴趣区域的至少一部分提供照亮。
18.根据权利要求7所述的系统,其中,所述一个或多个输出信号指定相对于所述主交通工具的取向方向的所述一个或多个指示符所参考的照亮区域的一个或多个边界,以用于向所述预定感兴趣区域提供照亮。
19.根据权利要求7所述的系统,其中,所述一个或多个输出信号指定相对于所述主交通工具的取向方向的所述一个或多个指示符或相对于所述摄像机的指向方向所参考的最小偏航值、最大偏航值、最小倾斜值、和最大倾斜值,以用于照亮与所述预定感兴趣区域至少部分重叠的区域。
20.根据权利要求7所述的系统,其中,所述一个或多个输出信号相对于所述主交通工具的纵轴、相对于所述预定感兴趣区域内的平均左侧主车道边界、和相对于所述感兴趣区域内的平均右侧主车道边界来指定左偏航和右偏航角。
21.根据权利要求1所述的系统,其中,所述主交通工具的取向的所述一个或多个指示符包括基于对所述多个图像中的至少一个的分析而确定的所述摄像机的指向方向。
22.根据权利要求21所述的系统,其中,所述主交通工具的取向的所述一个或多个指示符还包括所述摄像机在所述主交通工具正在其上行驶的路面上方的高度。
23.根据权利要求1所述的系统,其中,所述主交通工具的取向的所述一个或多个指示符指示所述主交通工具在其当前位置的取向。
24.根据权利要求1所述的系统,其中,当所述主交通工具接近山顶时,所述一个或多个输出信号引起所述可移动前灯的倾斜角的负改变。
25.根据权利要求1所述的系统,其中,当所述主交通工具接近所述路段中的斜坡时,所述一个或多个输出信号引起所述可移动前灯的倾斜角的正改变。
26.根据权利要求1所述的系统,其中,当所述主交通工具接近所述路段中的向左转弯弯道时,所述一个或多个输出信号引起所述可移动前灯的偏航角的向左改变。
27.根据权利要求1所述的系统,其中,当所述主交通工具接近所述路段中的向右转弯弯道时,所述一个或多个输出信号引起所述可移动前灯的偏航角的向右改变。
28.根据权利要求1所述的系统,其中,响应于由引入到所述主交通工具的有效载荷引起的所述主交通工具的取向改变,所述一个或多个输出信号引起所述可移动前灯的倾斜角的改变。
29.根据权利要求1所述的系统,其中,响应于主交通工具取向的检测到的1度或更大改变,所述一个或多个输出信号引起所述可移动前灯的指向方向的改变。
30.根据权利要求1所述的系统,其中,响应于主交通工具取向的检测到的0.5度或更大改变,所述一个或多个输出信号引起所述可移动前灯的指向方向的改变。
31.根据权利要求1所述的系统,其中,响应于主交通工具取向的检测到的0.1度或更大改变,所述一个或多个输出信号引起所述可移动前灯的指向方向的改变。
32.一种用于导航主交通工具的方法,所述方法包括:
33.一种包含指令的非暂时性计算机可读介质,所述指令在由至少一个处理器执行时促使所述至少一个处理器执行用于导航主交通工具的方法,所述方法包括:
技术总结
一种用于导航主交通工具的系统可以包括存储器和至少一个处理器,所述至少一个处理器配置成:接收由主交通工具上的摄像机获取的多个图像;基于对多个图像的分析,生成主交通工具前方的路段的道路几何形状模型;基于对多个图像中的至少一个的分析,确定主交通工具的取向的一个或多个指示符;并且基于主交通工具的取向的一个或多个指示符和主交通工具前方的路段的道路几何形状模型,生成一个或多个输出信号,所述一个或多个输出信号配置成引起主交通工具上的可移动前灯的指向方向的改变。
技术研发人员:S·赫什科维奇,M·申菲尔德,D·卡普兰
受保护的技术使用者:御眼视觉技术有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!