一种基于仿生微结构的柔性应变传感器及其制备方法
本发明涉及柔性传感,特别是涉及一种基于仿生微结构的柔性应变传感器及其制备方法。
背景技术:
1、个性化健康监测和精准医疗需求的快速增长,推动了可穿戴传感技术的发展。该技术具有对个体的性能和健康信息进行前所未有的原位、实时和持续检测的能力。可穿戴传感器与日常配件或个人设备(手表、隐形眼镜、手套、口罩等)的集成,极大地方便了生理参数的检测和分析。其中,应变传感器与人体皮肤中触觉感受器的作用一样,可以将压力信号转换为电信号,是传感器中最不可或缺的组件,决定着传感器的特点和性能。一般来说,灵敏度(即gauge factor,gf)和工作范围是评价应变传感器传感性能的两个关键指标。然而由于高灵敏度要求传感器在轻微应变下电阻变化较大,而大工作范围则要求传感器在整个拉伸过程中保持良好的导电通路。因此,大多数应变传感器在高灵敏度和高拉伸性之间仍存在权衡关系。为了获得具有高灵敏度、高拉伸性能的应变传感器,通常采用以下方法进行解决这一问题:1)将导电材料-柔性基底相结合;2)设计微结构表面。然而,柔性基底的微结构主要通过传统光刻工艺获得,制备工艺繁琐,成本高昂,所用的试剂也常包含有毒试剂,不利于传感器的广泛应用。因此,现需要一种制备工艺简单,具有生物相容性且具有优异的力学性能,可在大拉伸范围内实现保持高灵敏度。
技术实现思路
1、本发明的主要目的在于提供一种基于仿生微结构的可在大拉伸范围内保持高灵敏度的电阻式柔性应变传感器,解决传统的柔性拉伸应变传感器不能同时兼得高拉伸性和高灵敏度的问题。
2、为实现上述目的,本发明提供了一种基于芭蕉叶微结构的电阻式柔性应变传感器。包括:自上而下设置的封装层,导电层和基于微结构的柔性基底。
3、进一步地,柔性基底上,利用芭蕉叶叶面纹理形成平行脉状微结构。进一步地,柔性基底层材料包括但不限于ecoflex00-30硅胶与石墨烯混合的基于石墨烯的聚合物复合材料。
4、进一步地,封装层材料包括但不限于ecoflex00-30硅胶。
5、进一步地,导电层材料包括石墨烯和碳纳米管(cnts)的一维/二维混合材料。
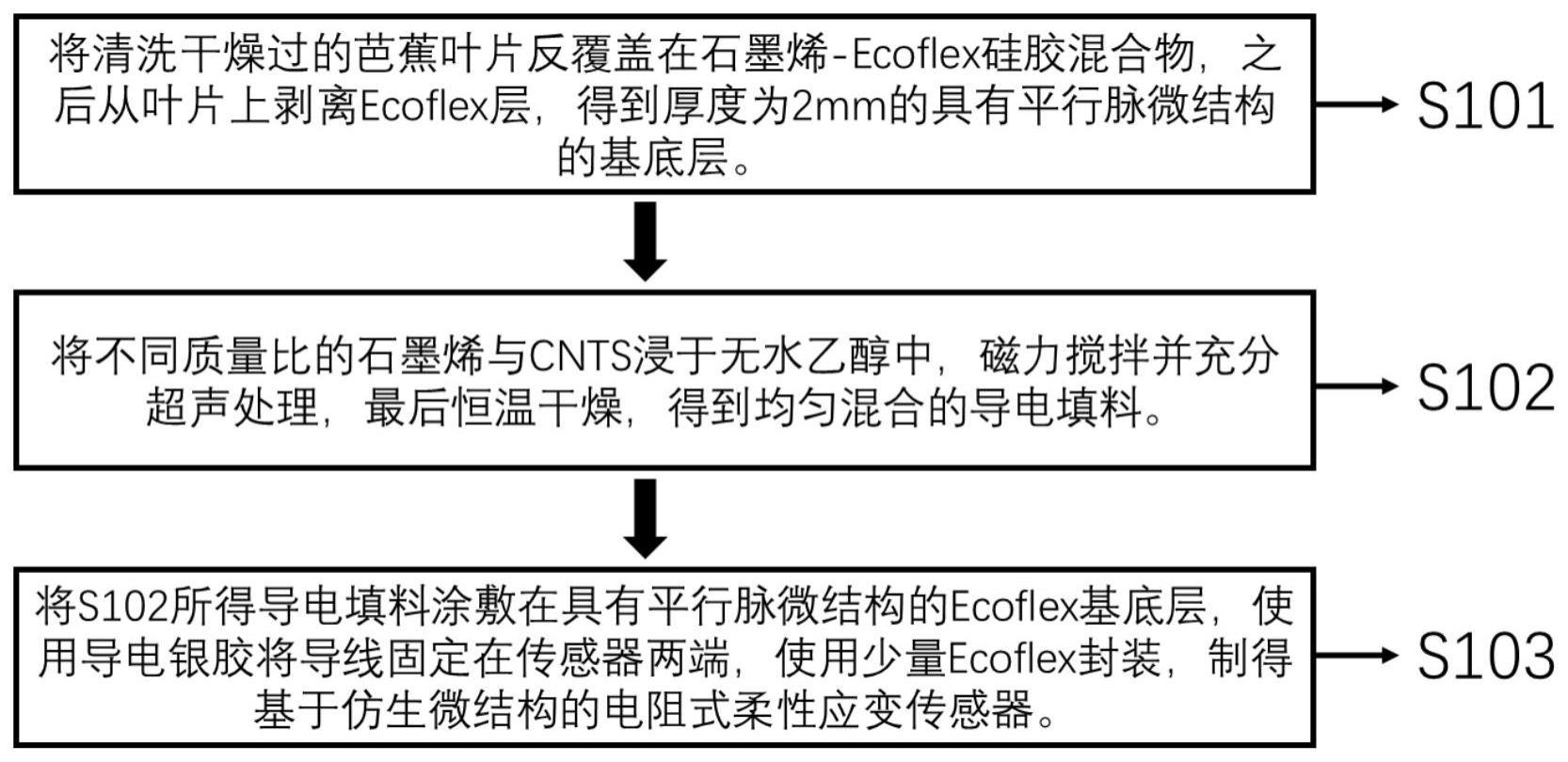
6、制备基于仿生微结构的柔性应变传感器的方法,包括以下步骤:
7、步骤1:使用去离子水清洗芭蕉叶,将叶片裁剪下一块标准矩形叶片;
8、步骤2:将ecoflex 00-30硅胶的a胶和b胶以质量比1:1混合,经过搅拌并去除气泡后,倾倒在矩形硅模具中,并将固定好的叶片正面反覆盖在其上,在75℃下进行恒温固化,之后从叶片上剥离ecoflex 00-30硅胶层,获得负ecoflex 00-30硅胶模具;
9、步骤3:在负ecoflex 00-30硅胶模具上用磁控溅射方法溅射100nm厚的铜;
10、步骤4:机械搅拌ecoflex 00-30以质量比1:1混合的a胶和b胶,称量定量石墨烯与ecoflex 00-30硅胶混合,机械搅拌后真空处理去除气泡,获得石墨烯-ecoflex 00-30硅胶混合物;
11、步骤5:将16ml石墨烯-ecoflex 00-30硅胶混合物倾倒在硅模具中,将步骤3中获得的负ecoflex 00-30硅胶模具反覆盖在石墨烯-ecoflex 00-30硅胶混合物上,在75℃的加热台上进行恒温干燥固化25min,之后将负模具剥离,获得具有平行脉微结构的基底层;
12、步骤6:将cnts浸入无水乙醇中超声1h,之后将石墨烯加入到超声过的含cnts的无水乙醇溶液中,其石墨烯与cnts混合质量比例依据待用标准选择1~9:1的多种比例,搅拌30min并超声2h,之后放入干燥箱中70℃干燥24h,得到混合均匀的导电填料。
13、步骤7:对在步骤5所得到的基底进行预拉伸,将步骤4中所得到的均匀混合体导电填料涂敷在步骤5所得到的基底上;
14、步骤8:使用导电银胶将导线粘贴在导电填料层左右两端,室温干燥;
15、步骤9:在导电层上方使用ecoflex 00-30硅胶以完成封装。
16、具体地,本发明所用ecoflex 00-30硅胶为smoth-on品牌的一款双组分液态铂金硅胶(https://m.tb.cn/h.5b7jxqs?tk=crxbdte9fv7),具体地,ecoflex00-30硅胶预聚液分a胶和b胶两个组分,其中a胶和b胶质量比为1:1。
17、本发明的有益效果包括:
18、1、本发明,基底层和封装层采用无毒材料。片状石墨烯导电填料在拉伸状态下互相分离,进而有着较高的灵敏度;在拉伸应变下,通过电阻值的变化,直观的反映出压力的大小。
19、2、本发明使用天然的芭蕉叶作为模板,芭蕉叶天然地在微米尺度上具有平行排列的脉状微结构,将这种层次化的结构用于柔性应变传感,赋予了基底层更大的形变空间与接触面积。利用ecoflex00-30硅胶进行复刻其结构,冷却后剥离叶片,形成负ecoflex 00-30硅胶模具,以此负ecoflex 00-30硅胶模具进行翻模,传感器可多次利用,面积大小可控。
20、3、本发明采用基于石墨烯的聚合物复合材料作为柔性基底,石墨烯在聚合物基底内缠结和折叠成复杂的导电网络,当施加应变时,隧道电阻改变,保证了传感器的高灵敏度。
21、4、本发明的基底层的平行脉状结构提高了传感器的最大应变量,在大拉伸下,虽然片状石墨烯互相分离,但一维材料cnts的存在保证了此时导电通路不断开,从而在大拉伸范围内保持了有效应变。此外石墨烯和cnts的混合导电材料具有基于隧穿效应的响应机制,石墨烯与cnts薄膜缠结和折叠成复杂的导电网络,当施加应变时,隧道电阻改变,进一步保证了传感器的高灵敏度。
22、5、本发明提供的电阻式拉伸应变传感器,其制作工艺简单,可重复使用,经济性好。
23、本发明解决了传统的柔性拉伸应变传感不能同时兼得的高拉伸性和高灵敏度,并且不能在大拉伸范围内持续保证高灵敏度的问题。基底层的平行脉状结构与石墨烯和一维cnts混合导电填料的共同作用,使整个结构有着大的拉伸性,也使其在大拉伸范围内有着有效的持续高灵敏度。
技术特征:
1.一种基于仿生微结构的柔性应变传感器,其特征在于:自上而下设置的封装层,导电层和基于微结构的柔性基底;柔性基底上,利用芭蕉叶叶面纹理形成平行脉状微结构。
2.根据权利要求1所述的柔性应变传感器,其特征在于,柔性基底层材料包括ecoflex00-30硅胶与石墨烯混合的复合材料。
3.根据权利要求1所述的柔性应变传感器,其特征在于,封装层为ecoflex00-30硅胶。
4.根据权利要求1所述的柔性应变传感器,其特征在于,导电层材料包括石墨烯和碳纳米管的一维或二维混合材料。
5.根据权利要求1所述的柔性应变传感器,其特征在于,
6.根据权利要求1所述的柔性应变传感器,其特征在于,所述柔性基底的微结构拱宽b范围在230-260μm,拱高h在30-40μm。
7.制备如权利要求1所述的传感器的方法,其特征在于包括以下步骤:
技术总结
一种基于仿生微结构的柔性应变传感器及其制备方法涉及柔性传感技术领域。基于仿生微结构的柔性应变传感器包括:自上而下设置的上封装层,导电层和基于微结构的柔性基底。其中,在导电层向上两端使用导电银胶固定连接了两条导线作为左右电极。本发明能够在保证大拉伸应变同时具有高灵敏度,还具有良好的循环稳定性和出色的信号响应性能。
技术研发人员:刘富荣,殷博硕,陈清远
受保护的技术使用者:北京工业大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!