一种针对多重共线性抑制的航磁补偿优化方法及系统
本发明涉及航磁补偿优化领域,尤其涉及一种针对多重共线性抑制的航磁补偿优化方法及系统。
背景技术:
1、航空磁测在地球物理、矿产勘探等领域均有广泛的应用,相比地面磁测,具有成本低、测量范围广等优点。在航空磁测中,通常将高精度的总场磁力仪、三轴磁通门、高度计以及gps等设备搭载在飞行平台上,沿目标区域飞行并测量区域的总磁场。但航空磁测会受到飞机机动干扰,地磁梯度和机载电子设备干扰的负面影响,这会导致目标磁异常信号被噪声淹没,严重抑制航空磁测的效果。因此,航空磁测需要使用航磁补偿技术针对上述干扰进行补偿与抑制。
2、目前,常用的航磁补偿方法通过最小二乘估计计算磁补偿系数,以此实现总干扰磁场的计算。但由于磁补偿模型的姿态矩阵中存在严重的多重共线性,导致最小二乘估计器中存在严重的方差,因此使用最小二乘估计器获得的磁补偿系数会偏离真实值,导致航磁补偿很难起到有效作用。
技术实现思路
1、为了解决上述问题,本发明提供了一种针对多重共线性抑制的航磁补偿优化方法及系统,在最小二乘估计的基础上,通过改善最小二乘估计中逆矩阵求解不稳定性问题来获取稳定、准确的补偿系数,从而提升航磁补偿效果。相比于岭回归的航磁补偿方法,本发明提出的方法具有变量选择的能力,针对姿态矩阵中的多重共线性具有更好的抑制能力,因此能够提升回归模型的准确性。
2、一种针对多重共线性抑制的航磁补偿优化方法,主要包括:
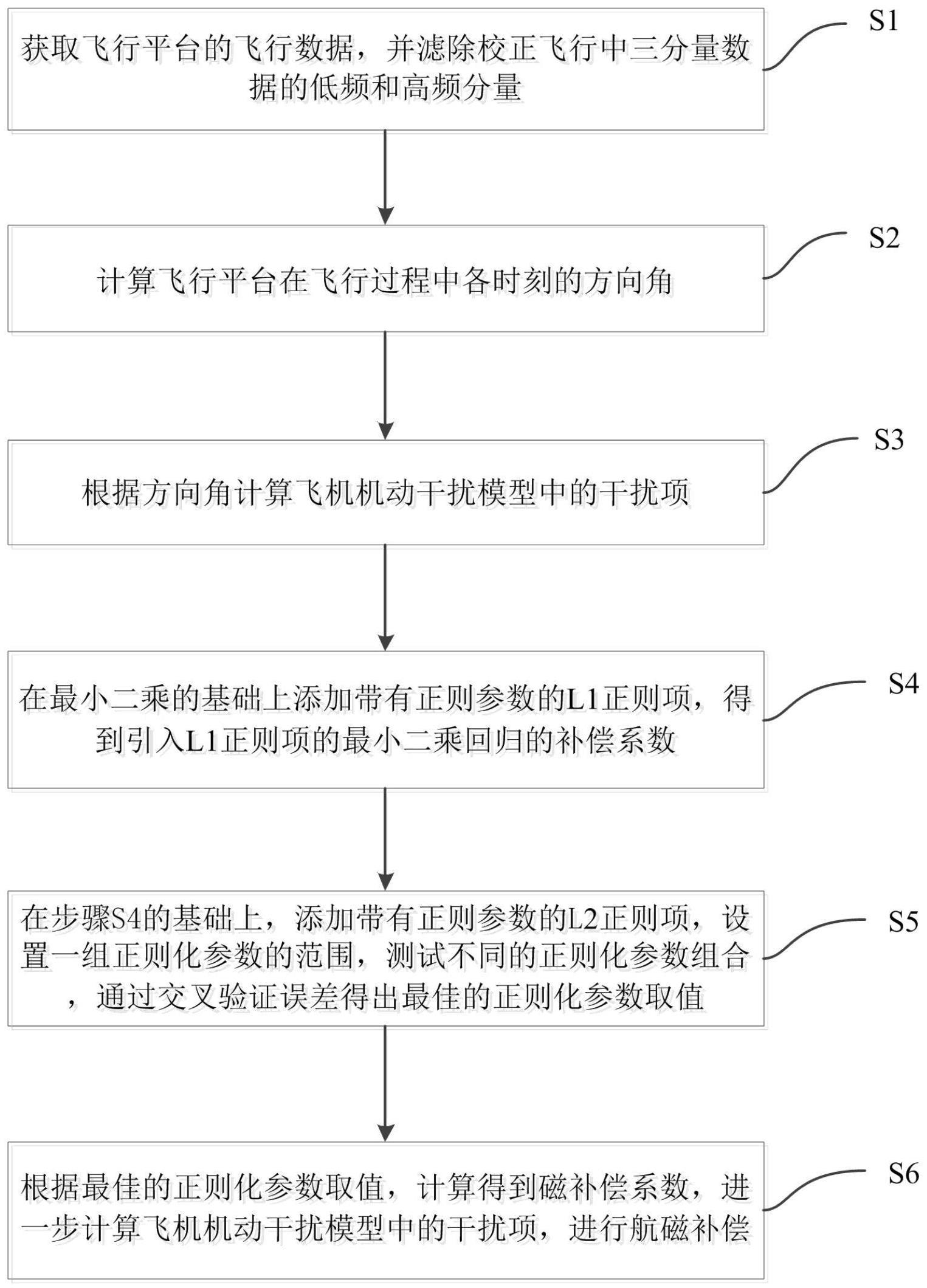
3、s1:获取飞行平台的飞行数据,并滤除校正飞行中三分量数据的低频和高频分量;
4、s2:计算飞行平台在飞行过程中各时刻的方向角;
5、s3:根据方向角计算飞机机动干扰模型中的干扰项;
6、s4:在最小二乘的基础上添加带有正则参数的l1正则项,得到引入l1正则项的最小二乘回归的补偿系数;
7、s5:在步骤s4的基础上,添加带有正则参数的l2正则项,设置一组正则化参数的范围,通过交叉验证误差得出最佳的正则化参数取值;
8、s6:根据最佳的正则化参数取值,计算得到磁补偿系数,进一步计算飞机机动干扰模型中的干扰项,进行航磁补偿。
9、进一步地,所述飞机机动干扰模型为:
10、
11、其中,h为机动干扰磁场,hp、hi、he分别为飞机机动干扰中的恒定磁场、感应磁场、涡流磁场,β是需要求解得到的18项补偿系数,x为飞机机动干扰磁场模型中干扰项组成的矩阵,
12、u1、u2、u3分别为地磁场与飞机的x轴、y轴、z轴形成的方向角对应的余弦值,du1/dt、du2/dt、du3/dt分别为u1、u2、u3对时间的导数,u1(du1/dt),u1(du2/dt),u1(du3/dt),u2(du1/dt),u2(du2/dt),u2(du3/dt),u3(du1/dt),u3(du2/dt),u3(du3/dt))表示余弦值与对应的余弦值导数相乘。
13、进一步地,u1、u2、u3通过三轴磁通门测得的三分量数据计算得到:
14、
15、其中,i=1,2,3,si为磁通门传感器第i个通道的测量数据经带通滤波后的结果。
16、进一步地,引入l1正则项的最小二乘回归的补偿系数计算公式为:
17、
18、其中,hq为第q个采样点对应的飞机机动干扰的值,β0为常量,βp为第p个干扰项对应的补偿系数,xpq为第q个采样点中第p个干扰项的值,λ为正则化参数,为l1正则项,q=1,2,…,n,p=1,2,…,k,n为采样点个数,k为干扰项的个数。
19、进一步地,获取最佳正则项参数λ1和λ2的步骤如下:
20、首先设置λ1和λ2的取值范围,然后测试不同的λ1和λ2的组合,通过交叉验证误差得出最佳的λ1和λ2,此时,交叉验证误差最小,最后将最佳的λ1和λ2作为计算补偿系数时正则化参数的取值。
21、进一步地,磁补偿系数的求解公式如下:
22、
23、其中,i为单位矩阵,λ1为l1正则项参数,λ2为l2为正则项参数。
24、进一步地,使用磁补偿系数进行航磁补偿的过程如下:
25、首先计算补偿飞行中的机动干扰模型的干扰项xp,xp为干扰项组成的矩阵x中的第p个元素,再使用所得的磁补偿系数计算总机动干扰磁场ht:
26、
27、进而得到补偿后的航磁总场数据:
28、hn=hm-ht (9)
29、其中,hm是光泵磁力仪测得的总场数据,hn是补偿后的航磁总场数据。
30、一种针对多重共线性抑制的航磁补偿优化系统,包括:处理器及存储设备;所述处理器加载并执行所述存储设备中的指令及数据用于实现所述的针对多重共线性抑制的航磁补偿优化方法。
31、本发明提供的技术方案带来的有益效果是:本发明所提出的航磁补偿优化方法的效果的优劣在于l1正则项系数和l2正则项系数的选取。将正则项系数转化为18维向量,可以有效提升所提出的航磁补偿优化方法的效果。并且,在通过交叉验证误差最小化方法计算正则项参数最优值的基础上,以最佳改善比ir为标准,在一定范围内对最佳正则项参数进行微调,得到实际上的最佳正则项参数。通过所提出的航磁补偿优化方法获得飞机机动干扰模型中补偿系数的值,能够有效抑制多重共线性所带来的负面影响,实现更准确估计补偿系数的目的。通过所提出的航磁补偿优化方法实现航磁补偿,其效果要明显优于商业航磁补偿仪aarc500,改善比得到大幅提高。
技术特征:
1.一种针对多重共线性抑制的航磁补偿优化方法,其特征在于:包括:
2.如权利要求1所述的一种针对多重共线性抑制的航磁补偿优化方法,其特征在于:所述飞机机动干扰模型为:
3.如权利要求2所述的一种针对多重共线性抑制的航磁补偿优化方法,其特征在于:u1、u2、u3通过三轴磁通门测得的三分量数据计算得到:
4.如权利要求1所述的一种针对多重共线性抑制的航磁补偿优化方法,其特征在于:引入l1正则项的最小二乘回归的补偿系数计算公式为:
5.如权利要求4所述的一种针对多重共线性抑制的航磁补偿优化方法,其特征在于:获取最佳正则项参数λ1和λ2的步骤如下:
6.如权利要求5所述的一种针对多重共线性抑制的航磁补偿优化方法,其特征在于:磁补偿系数的求解公式如下:
7.如权利要求6所述的一种针对多重共线性抑制的航磁补偿优化方法,其特征在于:使用磁补偿系数进行航磁补偿的过程如下:
8.一种针对多重共线性抑制的航磁补偿优化系统,其特征在于:包括:处理器及存储设备;所述处理器加载并执行所述存储设备中的指令及数据用于实现所述的针对多重共线性抑制的航磁补偿优化方法。
技术总结
本发明提供了一种针对多重共线性抑制的航磁补偿优化方法及系统,获取飞行平台的飞行数据,并滤除校正飞行中三分量数据的低频和高频分量;计算飞行平台在飞行过程中各时刻的方向角;根据方向角计算飞机机动干扰模型中的干扰项;在最小二乘的基础上添加带有正则参数的L1正则项,得到引入L1正则项的最小二乘回归的补偿系数;然后添加带有正则参数的L2正则项,设置一组正则化参数的范围,测试不同的正则化参数组合,通过交叉验证误差得出最佳的正则化参数取值;根据最佳的正则化参数取值,计算得到磁补偿系数,进一步计算飞机机动干扰模型中的干扰项,进行航磁补偿。本发明的有益效果是:实现更准确地估计补偿系数。
技术研发人员:葛健,唐悦能,胡祥云,胡超劼
受保护的技术使用者:中国地质大学(武汉)
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!