编码器装置、驱动装置、载置台装置以及机器人装置的制作方法
本发明涉及编码器装置、驱动装置、载置台装置以及机器人装置。
背景技术:
1、区分轴的旋转的数量的多旋转型的编码器装置搭载于机器人装置等各种装置(例如参照下述的专利文献1)。在机器人装置的动作中,编码器装置例如从机器人装置的主电源接受电力供给,检测包括表示旋转的数量的多旋转信息以及表示小于1周旋转的角度位置的角度位置信息的旋转位置信息。
2、但是,在机器人装置结束预定的处理时,有时其主电源被断开。在该情况下,从机器人装置的主电源向编码器装置的电力供给也停止。在机器人装置中,在主电源下次切换到接通时、即开始下次的动作时,有时需要初始的姿势等信息。因此,在编码器装置中,即使在未从外部供给电力的状态下,仍要求保持多旋转信息。因此,作为编码器装置,使用在得不到来自主电源的电力供给的状态下利用从电池供给的电力保持多旋转信息的装置。
3、现有技术文献
4、专利文献
5、专利文献1:日本特开平8-50034号公报
技术实现思路
1、如上所述的编码器装置最好电池无需维护(例如更换)或者维护的频度低。
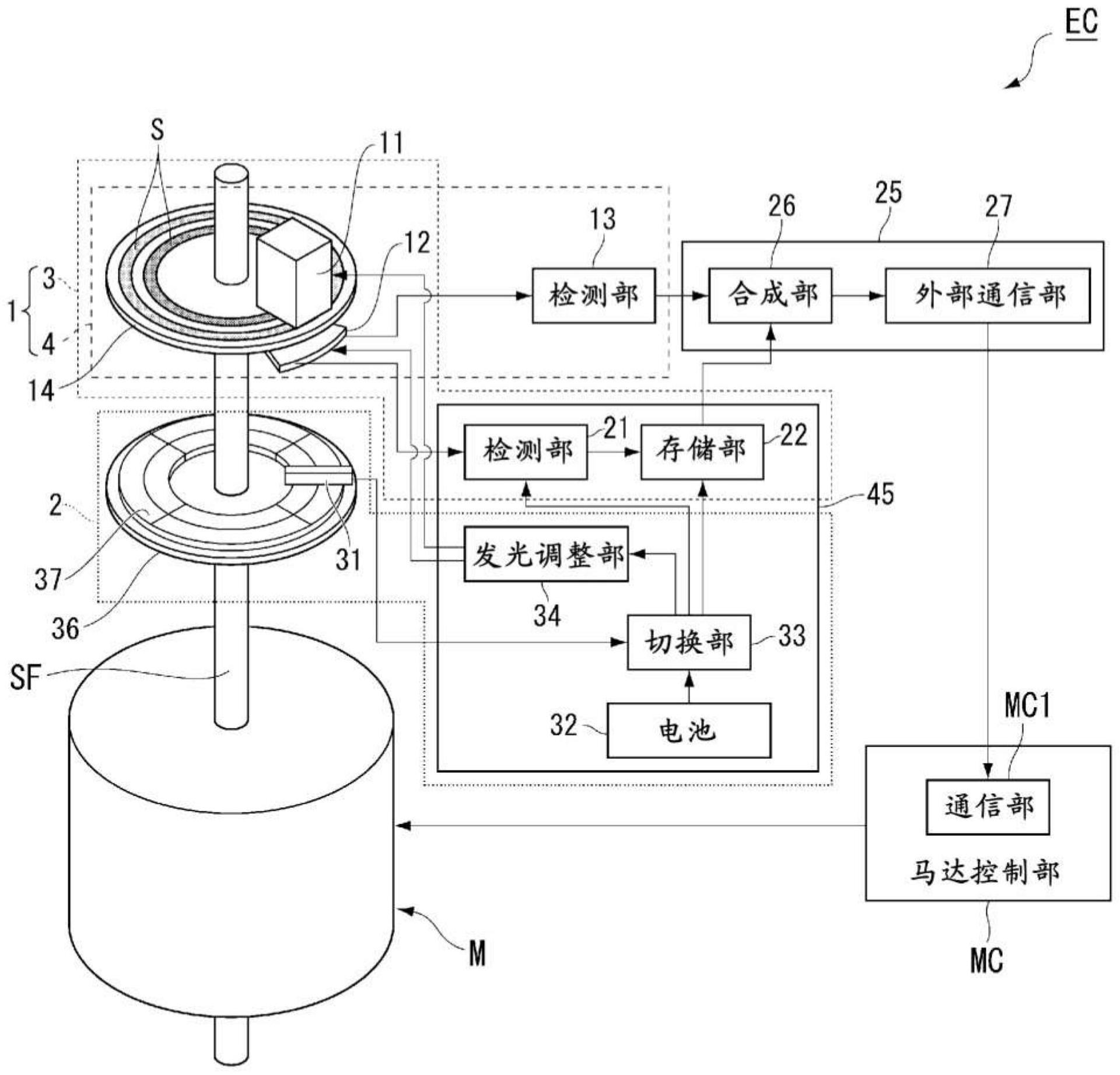
2、根据本发明的第1方案,提供一种编码器装置,具备:位置检测系统;电信号发生部,由于移动部的移动,发生电信号;以及发光调整部,根据电信号,调整从发光部的光的照射,所述位置检测系统包括:标尺(scale);发光部,向标尺照射光;光检测部,由于移动部的移动而与标尺的相对位置变化;检测部,根据光检测部的检测结果,检测移动部的位置信息。
3、根据本发明的第2方案,提供一种编码器装置,具备:检测系统,光学地检测标尺的位置信息,并且由于移动部的移动而与标尺的相对位置变化;信号发生部,由于移动部的移动,输出信号;以及调整部,根据信号,控制检测系统的动作。
4、根据本发明的第3方案,提供一种驱动装置,具备第1方案或者第2方案的编码器装置、和对移动部供给动力的动力供给部。
5、根据本发明的第4方案,提供一种载置台装置,具备移动物体和使移动物体移动的第3方案的驱动装置。
6、根据本发明的第5方案,提供一种机器人装置,具备第3方案的驱动装置和利用驱动装置相对移动的第1臂以及第2臂。
技术特征:
1.一种编码器装置(ec),具备:
2.根据权利要求1所述的编码器装置(ec),其中,
3.根据权利要求1或2所述的编码器装置(ec),其中,
4.根据权利要求1至3中任意一项所述的编码器装置(ec),其中,
5.根据权利要求1至4中任意一项所述的编码器装置(ec),其中,
6.根据权利要求5所述的编码器装置(ec),其中,
7.根据权利要求1至6中任意一项所述的编码器装置(ec),其中,
8.根据权利要求1至7中任意一项所述的编码器装置(ec),其中,
9.一种驱动装置(mtr),包括:
10.一种载置台装置(stg),包括:
11.一种机器人装置(rbt),包括:
技术总结
本发明涉及编码器装置、驱动装置、载置台装置以及机器人装置。提供电池无需维护或者维护的频度低的编码器装置。编码器装置具备:位置检测系统;电信号发生部,由于移动部的移动,发生电信号;以及发光调整部,根据电信号,调整从发光部的光的照射,所述位置检测系统包括:标尺;发光部,向标尺照射光;光检测部,由于移动部的移动而与标尺的相对位置变化;以及检测部,根据光检测部的检测结果,检测移动部的位置信息。
技术研发人员:后藤雅彦
受保护的技术使用者:株式会社尼康
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!