基于仓面对位动作的缆机运行安全分析预警方法与流程
本发明属于缆机运行安全监控,涉及基于仓面对位动作的缆机运行安全分析预警方法。
背景技术:
1、在水利工程的拱坝、重力坝等混凝土坝施工过程中,混凝土的运输工作基本依靠缆机垂直运输完成,缆机作业的安全及效率,直接影响大坝的浇筑进度,同时关系到作业人员的人身安全,而缆机在运行至仓面进行对位卸料的过程更是紧贴仓面作业人员、机械及构筑物,若在缆机仓面对位过程中发生碰撞现象,轻则造成缆机机械损坏、构筑物位移影响工程施工进度、质量,重则造成人员机械伤害/伤亡事故,将严重影响工程施工效率、质量及安全管理。
2、传统的缆机仓面对位下料动作,基本采用人工观察缆机料罐运行位置及仓面下料需求位置,通过对讲机及信号旗等方式指挥缆机运行,最终实现缆机对位、下料等动作。大多数水电工程位处高山峡谷,存在大风、强日照等天气现象,同时仓面交叉施工人员、机械数量众多,施工环境噪音大,缆机的实际运行位置对作业指挥人员的施工经验、状态及责任心依赖程度较大,无法完全保障缆机运行处于安全间距要求范围内。
3、公开号为cn 108427134 a的中国专利申请公开了一种组合定位缆机运行监测系统和缆机防碰调控方法,该专利通过对潜在空间冲突的障碍物,根据当前速度分别计算缆机、障碍物到达交汇点时间,如果到达交汇点时间相同,则判断为会发生时空冲突,由于缆机运行过程中速度会发生变化,特别是在快要达到浇筑位置时,缆车的速度出现明显变化,由于反应时间和运输距离都较短,导致出现较大计算误差,影响缆机运行的按安全性。
技术实现思路
1、为解决背景技术提出的问题,本专利旨在设计基于仓面对位动作的缆机运行安全分析预警方法,通过全球卫星定位技术(gnss-rtk)、uwb室内定位技术、物联网技术、移动通信技术,实现对缆机大钩、仓面人员、仓面机械的实时位置信息的监控与分析,并结合大坝仓面边界坐标信息,实现缆机在仓面对位阶段的“缆机-模板、缆机-机械、缆机-人员、缆机-浇筑面”的垂直距离与水平距离的实时分析,并将距离信息实时推送至施工管理人员,方便要料人员及时掌握缆机安全信息,及时报送预警信息,以达到缆机运行安全实时管控的作用。
2、为了实现上述目的,本发明提供如下技术方案:基于仓面对位动作的缆机运行安全分析预警方法,首先,通过差分卫星定位技术秒级实时获取缆机大钩在t时刻的位置pt=(xt,yt,zt),平仓机位置p2=(x2,y2,z2),振捣机位置p3=(x3,y3,z3),人员位置p4=(x4,y4,z4),通过仓面设计信息,获取仓面模板边界点集c(pc1=(xc1,yc1,zc1),pc2=(xc2,yc2,zc2),…,pcn=(xcn,ycn,zcn))与仓面模板最高高程hc,通过浇筑过程监控实时分析浇筑面高程hj;
3、具体还包括以下步骤:
4、s1判断缆机是否在仓面模板边界点集内:缆机实时水平面投影位置为pt=(xt,yt),仓面模板边界水平面投影点集为c(pc1=(xc1,yc1),pc2=(xc2,yc2),…,pcn=(xcn,ycn)),采用面积和判别法判断缆机是否在模板边界内,若是则进入步骤s2,若不是返回继续判断缆机是否在仓面模板边界内;
5、s2通过仓面模板边界点集,获取仓面模板高程hm=max(zc1,…zcn),则缆机与模板高差hlm为:
6、hlm=zt-hm;
7、若hlm<30m,则缆机进入对位环节,进入步骤s3;
8、若hlm>30m,则缆机未进入对位环节,继续通过s2判断;
9、s3缆机对位安全分析,具体包括以下子步骤;
10、s31计算缆机吊钩实时位置pt到仓面边界线段的垂直距离,仓面边界线段端点为pci(xci,yci,zci)与pci+1(xci+1,yci+1,zci+1),则在xy平面的直线为:
11、kx-y+c=0;
12、直线斜率:
13、
14、直线常量:
15、
16、在xy平面上,缆机吊钩实时位置pt到仓面边界线段的垂直距离为:
17、
18、s32设缆机吊钩与仓面边界线段的距离集为n,按步骤s31依次计算缆机吊钩与边界线段距离di,并将di计入n集合内;
19、s33对比计算缆机吊钩距离模板最短距离dmin,即为缆机与模板的距离dlm;
20、s4计算缆机与平仓机、仓面振捣机、仓面施工人员以及仓面浇筑面的距离,并分析缆机是否满足运行案卷距离,判断对位过程是否满足运行安全要求。
21、优选的,步骤s4具体包括以下子步骤:
22、s41按照下式计算缆机与平仓机的实时距离:
23、
24、hpc=|z1-z2|;
25、s42按照下式计算计算缆机与仓面振捣机的实时距离:
26、
27、hjx=|z1-z3|;
28、s43按照下式计算缆机与仓面施工人员距离:
29、
30、hry=|z1-z4|;
31、s44按照下式计算缆机与仓面浇筑面距离:
32、hjzm=|z1-z4|;
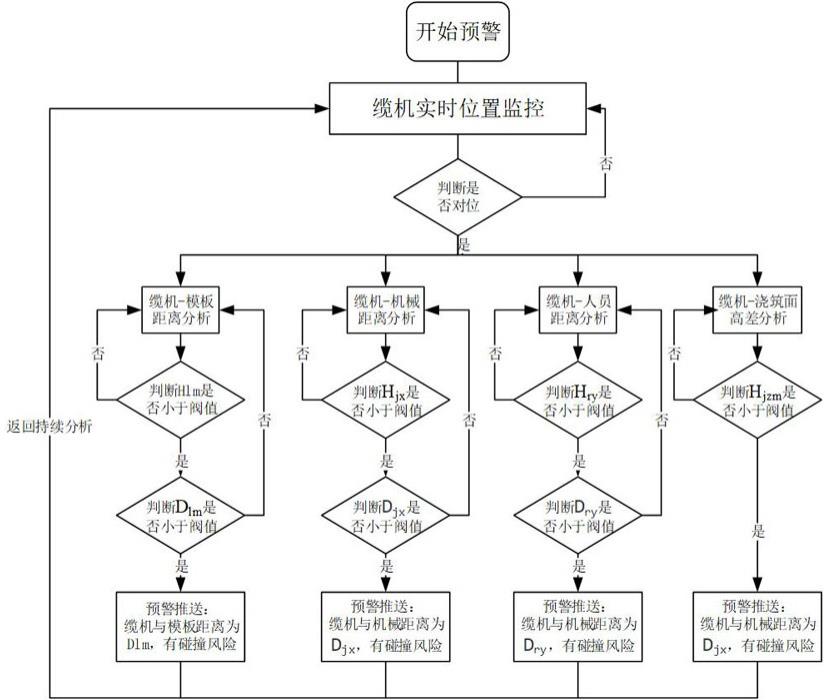
33、s45分别判断缆机与模板的距离、缆机与施工机械的距离、缆机与仓面人员的距离、缆机与仓面浇筑面的距离,其中缆机与施工机械的距离包括缆机与平仓机的距离、缆机与仓面振捣机的距离,当有任意一项距离小于设定的安全阀值时,对应推送小于所述安全阀值的对应信息,并预警提示存在碰撞风险;
34、s46当没有出现任意一项距离小于设定的安全阀值时,继续计算并判断上述距离信息。
35、优选的,还包括步骤s5,要料人员通过缆机实时间距分析,进行缆机对位过程指挥;同时,旁站监理或施工员根据预警信息进行缆机位置调整,避免安全事故发生。
36、本发明的有益效果如下:
37、1、本发明通过对缆机吊钩、仓面施工机械(平仓机、振捣机等)、仓面人员进行实时定位,在缆机对位过程中实时预判缆机-模板、缆机-机械、缆机-人员、缆机与浇筑面的竖向与水平的距离,结合安全距离控制标准,将预警信息实时推送至现场旁站人员与缆机仓面指挥人员,以便现场实施掌握缆机运行信息,从而保证缆机高效安全的运行。
38、2、本发明通过计算实时距离来判断是否存在碰撞风险,能够提高预测的准确性。
技术特征:
1.基于仓面对位动作的缆机运行安全分析预警方法,其特征在于,首先,通过差分卫星定位技术秒级实时获取缆机大钩在t时刻的位置pt=(xt,yt,zt),平仓机位置p2=(x2,y2,z2),振捣机位置p3=(x3,y3,z3),人员位置p4=(x4,y4,z4),通过仓面设计信息,获取仓面模板边界点集c(pc1=(xc1,yc1,zc1),pc2=(xc2,yc2,zc2),…,pcn=(xcn,ycn,zcn))与仓面模板最高高程hc,通过浇筑过程监控实时分析浇筑面高程hj;
2.根据权利要求1所述的基于仓面对位动作的缆机运行安全分析预警方法及系统,其特征在于:步骤s4具体包括以下子步骤:
3.根据权利要求1所述的基于仓面对位动作的缆机运行安全分析预警方法及系统,其特征在于:还包括步骤s5,要料人员通过缆机实时间距分析,进行缆机对位过程指挥;同时,旁站监理或施工员根据预警信息进行缆机位置调整,避免安全事故发生。
技术总结
本发明涉及基于仓面对位动作的缆机运行安全分析预警方法,通过差分卫星定位技术秒级实时获取缆机大钩在t时刻的位置、平仓机位置、振捣机位置、人员位置,通过仓面设计信息,获取仓面模板边界点集与仓面模板最高高程,通过浇筑过程监控实时分析浇筑面高程,首先判断缆机是否在仓面模板边界点集内,然后在对位过程中实时监测缆机与平仓机、振捣机、人员和仓面浇筑面的距离,当上述任意一项距离小于设置的安全阀值时,推送距离信息并进行预警提示,以供作业人员作出判断和调整。本发明通过直接实时计算缆机与各因素的距离,能够准确判断作业过程存在的直接安全风险,准确度高操作性强。
技术研发人员:杨宁,乔雨,高阳阳,谭鹏,林星
受保护的技术使用者:中国三峡建工(集团)有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!