一种抗干扰测距方法、装置与激光雷达与流程
本发明涉及深度传感,尤其涉及一种抗干扰测距方法、装置与激光雷达。
背景技术:
1、随着自动驾驶技术的发展,激光雷达(light detection and ranging,lidar)逐渐成为汽车的标配传感器。激光从发射器(tx)发出,被目标物体反射,再到被接收器(rx)接收,这一段飞行时间(time-of-flight,tof)被激光雷达测量并计算成距离。自动驾驶算法则根据距离信息做出避障、停车或直行等决策。
2、然而,作为一个主动式传感器,激光雷达不可避免的存在多机干扰的问题。多机干扰问题指的是,当两台激光雷达同时工作时,一台激光雷达发出的光被另一台激光雷达接收到,并被保存到直方图中。如果两台激光雷达存在时间上的相关性,如相同时钟频率或时钟频率存在倍数关系,则直方图中会形成两个信号峰,一个为本机,一个为干扰机器,从而产生错误的距离信息。
3、目前主流的伪随机数抗多机干扰的方案只能容纳有限的设备并存在较高的失效风险,而基于复杂光学系统的混沌光源方案虽然保证了抗干扰的效果,但是光学系统复杂,且集成度低。因此,如何在不影响激光雷达集成度的同时确保抗多机干扰的效果,是目前急需解决的问题。
技术实现思路
1、鉴于上述现有技术的不足,本发明的目的在于提供一种抗干扰测距方法、装置与激光雷达,以在不增加多余光学元件的前提下,实现可靠的抗多机干扰测距。
2、为了达到上述目的,本发明采取了以下技术方案:
3、本发明第一方面提供一种抗干扰测距方法,包括如下步骤:
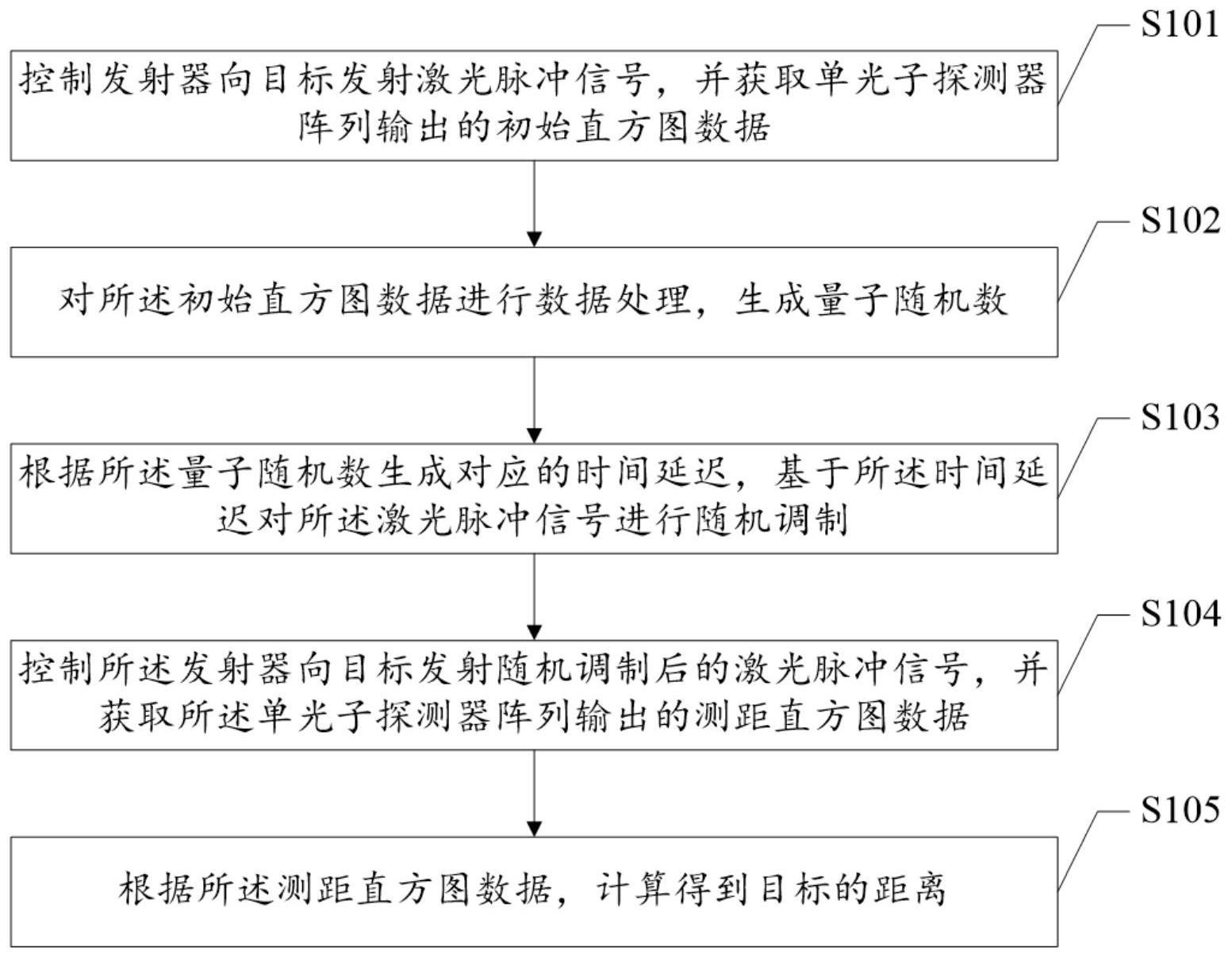
4、控制发射器向目标发射激光脉冲信号,并获取单光子探测器阵列输出的初始直方图数据;
5、对所述初始直方图数据进行数据处理,生成量子随机数;
6、根据所述量子随机数生成对应的时间延迟,基于所述时间延迟对所述激光脉冲信号进行随机调制;
7、控制所述发射器向目标发射随机调制后的激光脉冲信号,并获取所述单光子探测器阵列输出的测距直方图数据;
8、根据所述测距直方图数据,计算得到目标的距离。
9、在一个实施例中,所述对所述初始直方图数据进行数据处理,生成量子随机数,包括:
10、从所述初始直方图数据中截取得到底噪数据;
11、对所述底噪数据进行函数拟合,得到相应的底噪概率模型;
12、通过数据清洗算法从所述底噪概率模型中提取信息熵并生成量子随机数。
13、在一个实施例中,所述对所述底噪数据进行函数拟合,得到相应的底噪概率模型,包括:
14、对所述底噪数据进行分析,确认环境光强度与底噪形状;
15、根据所述环境光强度与底噪形状选择相应的概率分布模型对所述底噪数据进行函数拟合,得到相应的底噪概率模型。
16、在一个实施例中,所述根据所述环境光强度与底噪形状选择相应的概率分布模型对所述底噪数据进行函数拟合,具体为:
17、在强环境光和/或底噪形状为斜底噪时,通过指数函数模型对所述底噪数据进行函数拟合;
18、在弱环境光和/或底噪形状为均匀底噪时,通过高斯函数模型对所述底噪数据进行函数拟合;
19、在无环境光和/或底噪形状中存在拖尾形状时,通过指数函数模型对所述底噪数据进行函数拟合。
20、在一个实施例中,所述控制发射器向目标发射激光脉冲信号,并获取单光子探测器阵列输出的初始直方图数据之前,所述方法还包括:
21、出厂前进行算法配置,以根据相应的概率分布模型和数据清洗算法对所述初始直方图数据进行数据处理,生成量子随机数。
22、在一个实施例中,所述基于所述时间延迟对所述激光脉冲信号进行随机调制,具体指:
23、根据所述时间延迟对相邻激光脉冲信号之间的时间间隔进行随机调制,形成随机间隔的激光脉冲信号。
24、在一个实施例中,所述根据所述测距直方图数据,计算得到目标的距离之后,所述方法还包括:
25、对所述测距直方图数据进行数据处理,生成下一次曝光的量子随机数;
26、根据下一次曝光的量子随机数生成新的时间延迟,并基于新的时间延迟重新对所述激光脉冲信号进行随机调制;
27、在下一次曝光时控制发射器向目标发射重新调制后的激光脉冲信号,以对目标进行测距。
28、在一个实施例中,所述根据所述测距直方图数据,计算得到目标的距离之后,所述方法还包括:
29、将所述目标的距离发送至车机,以进行辅助驾驶。
30、本发明第二方面提供一种抗干扰测距装置,包括:
31、发射器,用于向目标发射激光脉冲信号;以及向目标发射随机调制后的激光脉冲信号;
32、单光子探测器阵列,用于接收目标对所述激光脉冲信号进行反射的光信号并输出初始直方图数据;以及接收目标对随机调制后的激光脉冲信号进行反射的光信号并输出测距直方图数据;
33、数据信号处理模块,用于对所述初始直方图数据进行数据处理,生成量子随机数;以及根据所述量子随机数生成对应的时间延迟,基于所述时间延迟对所述激光脉冲信号进行随机调制;以及根据所述测距直方图数据,计算得到目标的距离。
34、本发明第三方面提供一种激光雷达,包括如上述的抗干扰测距装置。
35、本发明的有益效果为:提供一种抗干扰测距方法、装置与激光雷达,通过基于直方图数据生成的量子随机数实现真正随机的延迟调制,使得在不增加多余的光学元件的同时实现可靠的抗多机干扰测距。
技术特征:
1.一种抗干扰测距方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的抗干扰测距方法,其特征在于,所述对所述初始直方图数据进行数据处理,生成量子随机数,包括:
3.根据权利要求2所述的抗干扰测距方法,其特征在于,所述对所述底噪数据进行函数拟合,得到相应的底噪概率模型,包括:
4.根据权利要求3所述的抗干扰测距方法,其特征在于,所述根据所述环境光强度与底噪形状选择相应的概率分布模型对所述底噪数据进行函数拟合,具体为:
5.根据权利要求3所述的抗干扰测距方法,其特征在于,所述控制发射器向目标发射激光脉冲信号,并获取单光子探测器阵列输出的初始直方图数据之前,所述方法还包括:
6.根据权利要求1所述的抗干扰测距方法,其特征在于,所述基于所述时间延迟对所述激光脉冲信号进行随机调制,具体指:
7.根据权利要求1所述的抗干扰测距方法,其特征在于,所述根据所述测距直方图数据,计算得到目标的距离之后,所述方法还包括:
8.根据权利要求1所述的抗干扰测距方法,其特征在于,所述根据所述测距直方图数据,计算得到目标的距离之后,所述方法还包括:
9.一种抗干扰测距装置,其特征在于,包括:
10.一种激光雷达,其特征在于,包括如权利要求9所述的抗干扰测距装置。
技术总结
本发明提供一种抗干扰测距方法、装置与激光雷达,方法包括:控制发射器向目标发射激光脉冲信号,并获取单光子探测器阵列输出的初始直方图数据;对所述初始直方图数据进行数据处理,生成量子随机数;根据所述量子随机数生成对应的时间延迟,基于所述时间延迟对所述激光脉冲信号进行随机调制;控制所述发射器向目标发射随机调制后的激光脉冲信号,并获取所述单光子探测器阵列输出的测距直方图数据;根据所述测距直方图数据,计算得到目标的距离。通过基于直方图数据生成的量子随机数实现真正随机的延迟调制,使得在不增加多余的光学元件的同时实现可靠的抗多机干扰测距。
技术研发人员:谢武峻,马志洁
受保护的技术使用者:深圳市灵明光子科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!