缪子探测器、三维摄影成像方法、装置及存储介质
本发明涉及成像,尤其涉及一种缪子探测器、三维摄影成像方法、装置及存储介质。
背景技术:
1、缪子是一种具有高穿透性的粒子,由于这种特性缪子探测技术已经在多个领域应用,而缪子成像技术是其中主要技术。缪子成像技术可以分为透射成像和散射成像两大类,散射成像也称为断层成像,该成像方法主要用于核材料检测和文物的无损检测等领域;透射成像也称为摄影成像,该成像方法已被用于火山学、矿物勘探以及各种其他工业和安全应用,因此用于摄影成像的探测器也颇受关注。缪子探测器一般分为塑料闪烁体探测器、气体探测器、核乳胶探测器。塑料闪烁体探测器机械加工容易、结构设计灵活、性能稳定,能够适应不同测量和应用场合,且成本较低,可以大规模运用。塑闪探测器是当前主流探测器,摄影成像是目前针对大尺度物体的最主要成像方法。
2、然而,探测器在收集缪子信息的时候,空气中会存在其它粒子产生干扰,主要有宇宙射线衰变的α粒子、β粒子和γ粒子,其中主要干扰粒子是γ粒子。γ粒子能量较低,因此对探测器收集的缪子信息造成干扰的是探测器直接在空气中接触的γ粒子,这些γ粒子会对探测器的成像精度和准确性造成较大影响。如果探测器的探测平面数量较多,可以使用跨层响应的方法对缪子进行筛选,而现有摄影成像探测器的探测平面层数较少,只有2~3层,无法使用跨层响应的方法,导致对宇宙射线的屏蔽成为难题。另外,利用缪子对物体进行探测的根本目标是获取物体的密度结构信息,目前比较成熟的三维密度结构成像方法是基于断层成像探测器,但其成像范围不超过探测器的探测面积,对大物体成像必须要大型探测器,因此无法对大尺度物体进行探测。而基于摄影成像的探测器可以获取的成像范围可以远超过探测器本身面积,但其缺点在于对于单一探测系统只能进行二维成像,而二维成像存在无法完全获得物体的密度结构信息的问题。因此,如何提高获取物体密度结构信息的可靠性及提高成像精度是亟待解决的技术问题。
3、上述内容仅用于辅助理解本发明的技术方案,并不代表承认上述内容是现有技术。
技术实现思路
1、本发明的主要目的在于提供一种三维摄影成像方法、装置、设备及存储介质,旨在解决现有技术中探测器获取物体密度结构信息的可靠性不高、成像精度不高的技术问题。
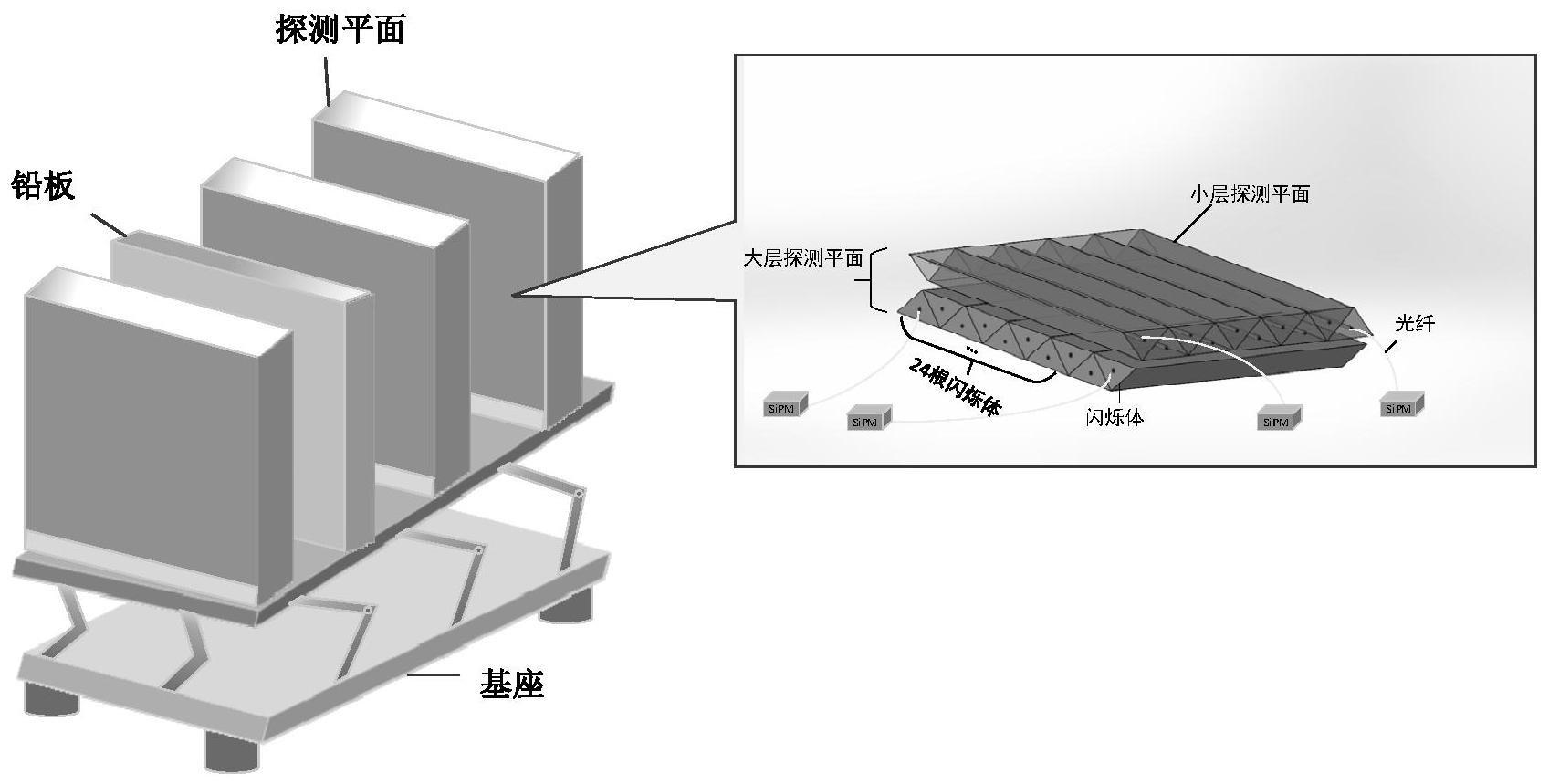
2、为实现上述目的,本发明提供一种缪子探测器,所述缪子探测器包括:依次平行设置的三层探测平面和一块铅板,以及三个采集板;
3、所述铅板设置在第二层探测平面和第三层探测平面之间;
4、所述探测平面由三棱柱形闪烁体和对应的光电传感器组成;
5、所述光电传感器与所述采集板连接;
6、所述采集板用于采集穿过物体缪子数量和天空缪子数量。
7、优选地,所述缪子探测器还包括外壳和可旋转底座;
8、所述三层探测平面和铅板封装在所述外壳内,所述外壳采用防光的铝制封装而成;
9、所述外壳设置在所述可旋转底座上,所述可旋转底座旋转以使所述缪子探测器调整不同角度对物体进行探测。
10、优选地,应用于如上文所述的缪子探测器,所述三维摄影成像方法,包括:
11、获取所述缪子探测器收集的穿过物体缪子数量和天空缪子数量;
12、根据所述穿过物体缪子数量和所述天空缪子数量,计算物体的不透明度;
13、根据所述不透明度,计算密度误差,并根据所述密度误差,计算物体的密度;
14、比较所述密度误差是否小于最小误差;
15、若所述密度误差小于最小误差,则输出所述物体的密度。
16、优选地,所述根据所述穿过物体缪子数量和所述天空缪子数量,计算物体的不透明,包括:
17、根据所述穿过物体缪子数量和所述天空缪子数量,计算穿过物体的缪子通量衰减系数;
18、根据所述缪子通量衰减系数,计算穿过物体的最小穿过能量;
19、根据所述最小穿过能量,计算物体的不透明度。
20、优选地,所述根据所述不透明度,计算密度误差,包括:
21、将所述不透明度拆分为独立不透明度矩阵;
22、将所述独立不透明度矩阵中缪子进行体素遍历,获得体素径迹;
23、根据所述体素径迹,计算密度误差。
24、优选地,在所述将所述独立不透明度矩阵中缪子进行体素遍历,获得体素径迹之前,还包括:
25、建立物体密度结构模型,并设置初始密度;
26、对所述物体密度结构模型进行拆分,获得物体的体素矩阵;
27、相应地,所述将所述独立不透明度矩阵中缪子进行体素遍历,获得体素径迹,具体包括:
28、根据所述体素矩阵,将所述独立不透明度矩阵中缪子进行体素遍历,获得体素径迹。
29、优选地,所述根据所述密度误差,计算物体的密度,包括:
30、根据所述密度误差,使用联合代数重建算法公式进行最优解逼近得到物体的密度;所述联合代数重建算法公式为:
31、
32、其中,表示在第v个体素中进行第j次迭代后的密度,为所述密度误差。
33、优选地,所述获取所述缪子探测器收集的穿过物体缪子数量和天空缪子数量之前,还包括:
34、根据所述缪子探测器中采集板采集的信号,计算缪子经过的通道数量;
35、判断所述通道数量是否为预设值;
36、若所述通道数量为预设值,则合并存储为缪子事件。
37、此外,为实现上述目的,本发明还提出一种三维摄影成像装置,所述三维摄影成像装置包括:
38、获取模块,用于获取所述缪子探测器收集的穿过物体缪子数量和天空缪子数量;
39、计算模块,用于根据所述穿过物体缪子数量和所述天空缪子数量,计算物体的不透明度;
40、所述计算模块,还用于根据所述不透明度,计算密度误差,并根据所述密度误差,计算物体的密度;
41、所述计算模块,还用于比较所述密度误差是否小于最小误差;
42、所述计算模块,还用于若所述密度误差小于最小误差,则输出所述物体的密度。
43、此外,为实现上述目的,本发明还提出一种存储介质,所述存储介质上存储有三维摄影成像程序,所述三维摄影成像程序被处理器执行时实现如上文所述的三维摄影成像方法的步骤。
44、本发明中,提供了一种可屏蔽本底噪声的新型缪子探测器和联合多个二维图像的三维成像方法。探测器由三层是在探测平面之间加一层铅板,可有效屏蔽空气中的γ粒子,减少了本底噪声干扰并提高成像精度;三维成像方法可以对探测物体的密度结构信息有更清晰的认识,增加了探测结果的可靠性。
技术特征:
1.一种缪子探测器,其特征在于,所述缪子探测器包括:依次平行设置的三层探测平面和一块铅板,以及三个采集板;
2.如权利要求1所述的缪子探测器,其特征在于,所述缪子探测器还包括外壳和可旋转底座;
3.一种三维摄影成像方法,其特征在于,应用于如权利要求1或2中所述的缪子探测器,所述三维摄影成像方法,包括:
4.如权利要求3所述的三维摄影成像方法,其特征在于,所述根据所述穿过物体缪子数量和所述天空缪子数量,计算物体的不透明,包括:
5.如权利要求3所述的三维摄影成像方法,其特征在于,所述根据所述不透明度,计算密度误差,包括:
6.如权利要求5所述的三维摄影成像方法,其特征在于,在所述将所述独立不透明度矩阵中缪子进行体素遍历,获得体素径迹之前,还包括:
7.如权利要求3所述的三维摄影成像方法,其特征在于,所述根据所述密度误差,计算物体的密度,包括:
8.如权利要求3~7中任一项所述的三维摄影成像方法,其特征在于,所述获取所述缪子探测器收集的穿过物体缪子数量和天空缪子数量之前,还包括:
9.一种三维摄影成像装置,其特征在于,所述三维摄影成像装置包括:
10.一种存储介质,其特征在于,所述存储介质上存储有三维摄影成像程序,所述三维摄影成像程序被处理器执行时实现如权利要求3至8中任一项所述的三维摄影成像方法的步骤。
技术总结
本发明公开了一种缪子探测器、三维摄影成像方法、装置及存储介质,其中,本发明缪子探测器包括:依次平行设置的三层探测平面和一块铅板,以及三个采集板;所述铅板设置在第二层探测平面和第三层探测平面之间;所述探测平面由三棱柱形闪烁体和对应的光电传感器组成;所述光电传感器与所述采集板连接;所述采集板用于采集穿过物体缪子数量和天空缪子数量。本发明的缪子探测器由三层是在探测平面之间加一层铅板,可有效屏蔽空气中的γ粒子,减少了本底噪声干扰并提高成像精度。
技术研发人员:葛健,杨志锐,胡祥云,董浩斌,刘双,张恒磊
受保护的技术使用者:中国地质大学(武汉)
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!