浮式风电系泊缆监测方法与流程
本发明涉及漂浮式风电装备,具体为浮式风电系泊缆监测方法。
背景技术:
1、海上浮式风电装备正在经历从样机到商业化的进程,浮式风电机组与固定式机组最大的差异就是基础结构形式和存在系泊系统,系泊系统常用于海工平台及船舶,在风电中运用较少。浮式风电平台与传统海工平台及船舶不同,浮式风电平台上部风载荷较大,与波浪载荷和流载荷会产生迭代作用,所以浮式风电机组系泊系统运动及受力相较于普通海工平台系泊系统更加复杂,现有的系泊测量方法难以长时间不脱缆操作。
技术实现思路
1、本发明的目的是克服上述现有技术的缺点,提供一种可提高测量精度和可靠性、实现对整个系泊系统长时间监测的浮式风电系泊缆监测方法。
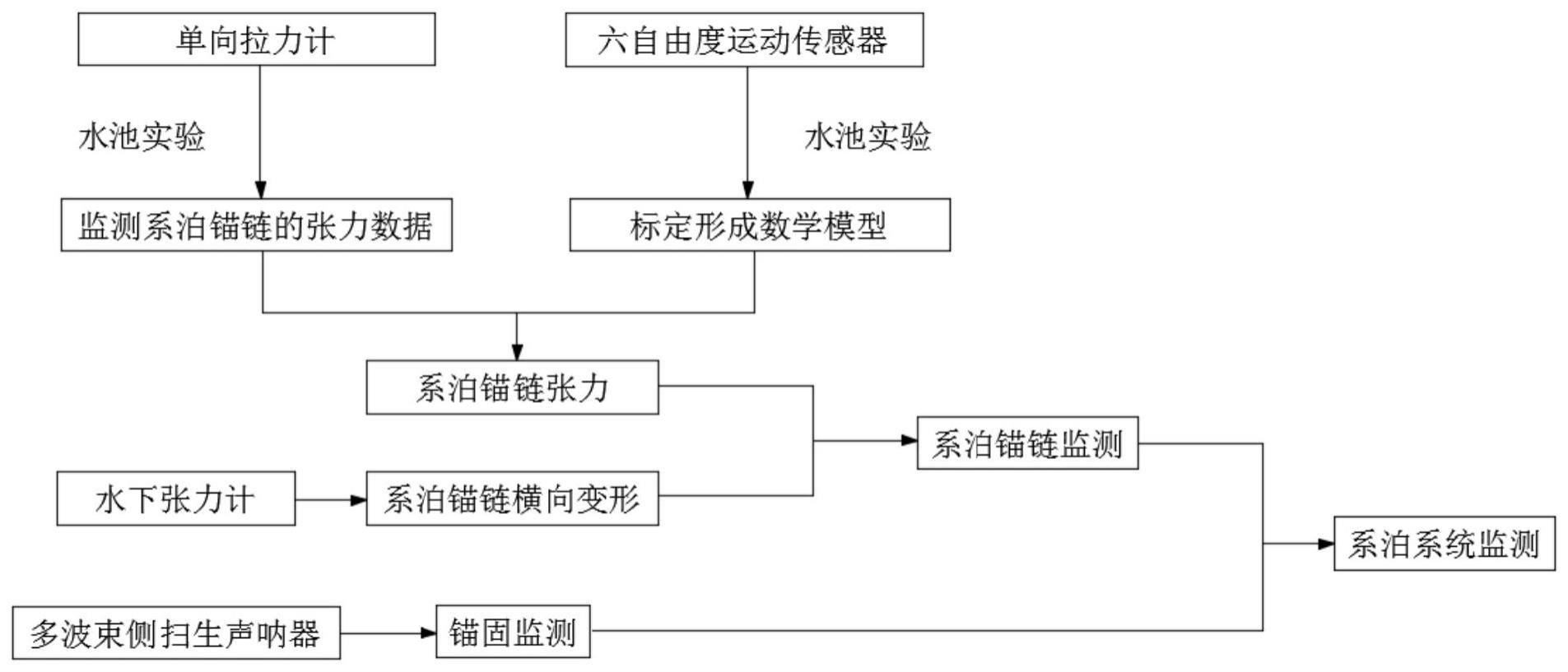
2、本发明是通过以下技术方案来实现的:浮式风电系泊缆监测方法,所述系泊缆监测方法应用的监测系统包括单向拉力计、六自由度运动传感器、水下张力计,所述单向拉力计设置在浮体平台与系泊锚链的连接处,所述六自由度运动传感器设置在浮体平台上,系泊锚链上设置多个间隔分布的所述水下张力计;
3、所述系泊缆监测方法的步骤包括:
4、s1.获取浮体平台的六自由度响应数据;
5、s2.以浮体平台中心为原点,建立相对坐标系;
6、s3.根据六自由度响应数据和相对坐标系,计算悬链线整根线的水平投影和计算悬链线导缆孔端距离海底高度;
7、s4.根据悬链线整根线的水平投影、悬链线导缆孔端距离海底高度以及悬链线系泊力推算公式建立数学模型,依据数学模型推算系泊锚链的张力数据;
8、s5.获取单向拉力计所测得的系泊锚链的张力数据;
9、s6.将单向拉力计所测得的张力数据和依据数学模型推算得到的张力数据进行相互验证,判断数学模型是否有效适用,若有效适用,则采用数学模型,否则,返回步骤s3;
10、s7.获取水下张力计所测的系泊锚链的横向变形数据;
11、s8.依据数学模型推算所得的张力数据和水下张力计所测的横向变形数据,得到系泊锚链整体的受力情况。
12、进一步地:步骤s1所述的六自由度响应数据为,任意时刻t,浮体平台相对t0时刻的横荡ysw、纵荡xsu、垂荡zh、横摇θr、纵摇θp和艏摇θy。
13、进一步地:步骤s2所述的以所述浮体平台中心作为原点,建立相对坐标系的方法为,以横荡、纵荡、垂荡建立相对坐标系,系泊锚链与浮体平台分离点相对浮体平台中心在oxyz坐标系下的坐标为(xa,ya,za),系泊锚链在海底的锚固点在大地坐标系下的坐标为(xb,yb,zb),某时刻to浮体平台中心点在大地坐标系下的坐标为(x0,y0,z0),对系泊锚链与浮体平台分离点的运动进行分析,t时刻系泊锚链与浮体平台分离点在大地坐标系下的坐标为:
14、xa=x0+xsu+xacosθpcosθy
15、ya=y0+ysw+yacosθycosθr
16、za=z0+zh+zacosθrcosθp
17、进一步地:步骤s3所述的计算悬链线整根线的水平投影的公式为:
18、
19、式中,sx表示悬链线整根线的水平投影;
20、计算悬链线导缆孔端距离海底高度的公式为:
21、sz=|z0+zh+zacosθrcosθp-zb|(2)
22、式中,sz表示系泊锚链导缆孔端距离海底的高度。
23、进一步地:步骤s4所述的悬链线系泊力推算公式为:
24、v=sw+v0(3)
25、
26、
27、t=sqrt(v^2+h^2)(6)
28、式中,w表示系泊锚链在水中的湿重,e表示弹性模量,a表示系泊锚链截面积,s表示系泊锚链的悬垂部分拉伸前的长度,v表示系泊锚链的任意位置等效张力的垂直分量,h表示系泊锚链的任意位置等效张力的水平分量,v0表示系泊锚链的触地点等效张力的垂直分量,h表示系泊锚链导缆孔端距离海底的高度,t表示锚链张力,将公式(1)和(3)代入公式(4),将公式(2)和(3)代入公式(5),求解得v和h,再将v和h代入公式(6)求解得t。
29、进一步地:还包括多波束侧扫声呐器,所述多波束侧扫声呐器设置在系泊锚链在海底的锚固点位置,所述多波束侧扫声呐器监测系泊锚链在海底的锚固点的位置是否发生位移,若是,则对走锚事故进行预警,并更新系泊锚链在海底锚固点在大地坐标系下的坐标(xb,yb,zb),同时更新数学模型,以获取更精确的测量结果。
30、与现有技术相比,本发明具有以下有益效果:
31、通过六自由度运动传感器检测浮体平台的六自由度响应数据,以浮体平台中心为原点,建立相对坐标系,依据六自由度响应数据和相对坐标系,计算悬链线整根线的水平投影和计算悬链线导缆孔端距离海底高度,悬链线整根线的水平投影、悬链线导缆孔端距离海底高度以及悬链线系泊力推算公式建立数学模型,依据数学模型推算系泊锚链的张力数据,从而标定出系泊锚链张力与浮体平台之间的关系,可减少所需测量的物理量,另外通过将单向拉力计所测得的张力数据与利用数学模型推算所得到的张力数据进行相互验证,提高数学模型的准确性,通过多波束侧扫声呐器监测系泊锚链在海底锚固点的位置是否发生位移,若发生位置,则更新系泊锚链在海底锚固点在大地坐标系下的坐标,并更新数学模型,从而提高测量精度和可靠性,实现长时间监测系泊和锚固,对整个系泊系统进行长时间监测。
技术特征:
1.浮式风电系泊缆监测方法,其特征在于:所述系泊缆监测方法应用的监测系统包括单向拉力计、六自由度运动传感器、水下张力计,所述单向拉力计设置在浮体平台与系泊锚链的连接处,所述六自由度运动传感器设置在浮体平台上,系泊锚链上设置多个间隔分布的所述水下张力计;
2.根据权利要求1所述浮式风电系泊缆监测方法,其特征在于:步骤s1所述的六自由度响应数据为,任意时刻t,浮体平台相对t0时刻的横荡ysw、纵荡xsu、垂荡zh、横摇θr、纵摇θp和艏摇θy。
3.根据权利要求2所述浮式风电系泊缆监测方法,其特征在于:步骤s2所述的以所述浮体平台中心作为原点,建立相对坐标系的方法为,以横荡、纵荡、垂荡建立相对坐标系,系泊锚链与浮体平台分离点相对浮体平台中心在oxyz坐标系下的坐标为(xa,ya,za),系泊锚链在海底的锚固点在大地坐标系下的坐标为(xb,yb,zb),某时刻to浮体平台中心点在大地坐标系下的坐标为(x0,y0,z0),对系泊锚链与浮体平台分离点的运动进行分析,t时刻系泊锚链与浮体平台分离点在大地坐标系下的坐标为:
4.根据权利要求3所述浮式风电系泊缆监测方法,其特征在于:步骤s3所述的计算悬链线整根线的水平投影的公式为:
5.根据权利要求3所述浮式风电系泊缆监测方法,其特征在于:步骤s4所述的悬链线系泊力推算公式为:
6.根据权利要求5所述浮式风电系泊缆监测方法,其特征在于:还包括多波束侧扫声呐器,所述多波束侧扫声呐器设置在系泊锚链在海底的锚固点位置,所述多波束侧扫声呐器监测系泊锚链在海底的锚固点的位置是否发生位移,若是,则对走锚事故进行预警,并更新系泊锚链在海底锚固点在大地坐标系下的坐标(xb,yb,zb),同时更新数学模型,以获取更精确的测量结果。
技术总结
本发明公开了浮式风电系泊缆监测方法,系泊缆监测方法的步骤包括:S1.获取浮体平台的六自由度响应数据,S2.以浮体平台中心为原点,建立相对坐标系,S3.计算悬链线整根线的水平投影和悬链线导缆孔端距离海底高度,S4.根据悬链线系泊力推算公式建立浮体平台运动与系泊拉力之间的数学模型,依据数学模型推算系泊锚链的张力数据,S5.获取单向拉力计所测的系泊锚链的张力数据,S6.将单向拉力计所测的张力数据和依据数学模型推算的张力数据进行相互验证,S7.获取水下张力计所测的系泊锚链的横向变形数据,S8.依据数学模型所得张力数据和水下张力计所测的横向变形数据,得到系泊锚链整体受力情况。本发明可提高测量精度和可靠性、实现对整个系泊系统长时间监测。
技术研发人员:周舒旎,邓燕飞,郝玉恒
受保护的技术使用者:广东海装海上风电研究中心有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!