一种可识别旋转角的光电模组及旋转角识别方法与流程
本发明涉及光电模组领域,具体是一种可识别旋转角的光电模组及旋转角识别方法。
背景技术:
1、目前市面上销售的人体手持式光电交互设备例如鼠标,其中的光电模组多为单光路系统,包括处理器、单个光源和图像采集芯片以及相应的光学镜片。单光源发出的光入射至鼠标下方反射面的反射目标位置,被反射面反射后由图像采集芯片接收,图像采集芯片生成图像信号并传输至处理器,处理器比较设定时间周期前后时间点的图像,进而得到鼠标及光电模组整体偏移运动时产生的偏移量和偏移方向。
2、这种光学模组由于采用单光路系统,因此实质上只能得到的是由于偏移运动而产生的平移量,但实际上偏移运动有时不仅包含直接平移运动,还包含旋转运动,因此现有鼠标的光电模组由于其单光路系统的原理,无法满足检测偏移运动产生的旋转角的需求。
技术实现思路
1、本发明提供了一种可识别旋转角的光电模组及旋转角识别方法,以解决现有的光电模组在人体手持式光电交互设备偏移运动中难以获取设备旋转角的问题。
2、为了达到上述目的,本发明所采用的技术方案为:
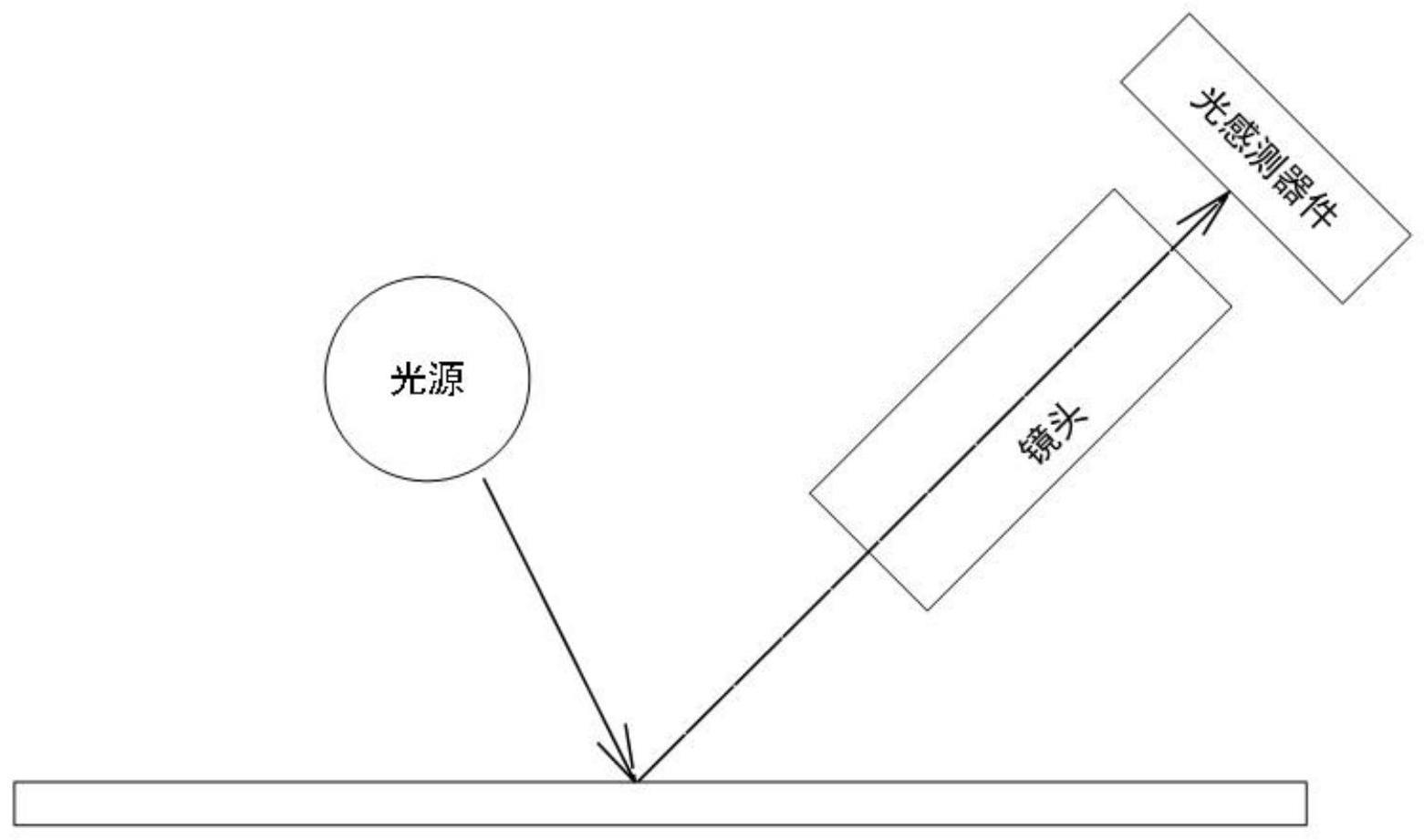
3、一种可识别旋转角的光电模组,包括处理器和两个位移测头,每个位移测头分别包括光源、光学镜头和光感测器件,两个位移测头中的光感测器件之间间距固定,两个位移测头中的光感测器件分别与处理器电连接;每个位移测头中的光源为光感测器件提供光照,两个位移测头中光源出射光分别入射至同一反射面,经反射面反射后形成的反射光,反射光分别经各自对应的光学镜头在对应的光感测器件的感测面上成像,由光感测器件感测图像后并产生图像信号送入至处理器,并由所述处理器对连续输入的图像信号进行前后对比处理得到光电模组偏移运动时每个光感测器件的偏移量,进而由处理器基于每个光感测器件的偏移量以及偏移运动前后的位置,计算出两光感测器件确定的水平直线的旋转角,即为光电模组的旋转角。
4、进一步的,处理器为mcu、或cpu、或arm、或dsp。
5、进一步的,所述光感测器件为图像采集芯片,或光电传感器。
6、进一步的,所述光源为激光或led光源。
7、进一步的,所述光学镜头为成像透镜。
8、进一步的,成像透镜的物方焦面在相同的水平面上。
9、一种基于上述光电模组的旋转角识别方法,包括以下步骤:
10、步骤1、在光电模组当前偏移运动中,处理器通过连续的图像采集与处理,获取每个位移测头中光感测器件在当前偏移运动中的偏移量;
11、步骤2、处理器以光电模组当前偏移运动之前两位移测头中光感测器件确定的线段的几何中心为原点建立坐标系,并由处理器计算每个光感测器件的偏移量在所述坐标系中x轴和y轴的分量,然后由处理器根据两个成对设置的位移测头中光感测器件的偏移量在x轴或y轴的分量判断是否存在旋转角,当两个光感测器件的偏移量在x轴或y轴的分量相等时,则判断结果为旋转角为0;当两个光感测器件的偏移量在x轴或y轴的分量不相等时,则判断结果为存在旋转角,处理器根据两个光感测器件的偏移量在x轴和y轴的分量,以及两个光感测器件偏移运动前后的位置即两个光感测器件偏移运动前后在坐标系的坐标,计算得到旋转角角度。
12、进一步的步骤2中,采用向量点积求解法、三角形余弦定理求解法、两直线斜率倾斜夹角求解法、向量叉积反正弦求解法、复数辐角求解法、矩阵求解法中的任意一种求解法,计算得到所述旋转角角度。
13、进一步的,步骤2还包括:所述处理器根据两个光感测器件中心线段的长度,以及光电模组当前偏移运动之前两个光感测器件中心连线与坐标系x轴之间的夹角,计算得到光电模组在当前偏移运动之前光感测器件在坐标系中的坐标;并由处理器结合旋转中心与其中任意一个光感测器件之间距离,计算得到光电模组当前偏移运动之前旋转中心在坐标系中的坐标;然后由处理器根据任意一个光感测器件在光电模组当前偏移运动之前的坐标、相应光感测器件的偏移量、旋转角、旋转中心在光电模组当前偏移运动之前的坐标,计算得到旋转中心由于光电模组偏移运动产生的平移量。
14、本发明光电模组采用双光路系统,在光电模组整体偏移运动时,不仅可以获得偏移运动时产生的平移量,还可以获得偏移运动时产生的旋转角,在不减少原有光电模组检测的平移增量的基础上,增强了光电模组的运动检测能力,使光电模组对运动检测的结果更为准确,因此扩展了光电模组的应用场景,丰富了应用光电模组的人体手持式光电交互设备的特点。例如在游戏中摆头动作,可以通过人体手持式光电交互设备的前部左右摇摆实现游戏人物的摆头动作等。
技术特征:
1.一种可识别旋转角的光电模组,其特征在于,包括处理器和两个位移测头,每个位移测头分别包括光源、光学镜头和光感测器件,两个位移测头中的光感测器件之间间距固定,两个位移测头中的光感测器件分别与处理器电连接;每个位移测头中的光源为光感测器件提供光照,两个位移测头中光源出射光分别入射至同一反射面,经反射面反射后形成的反射光,反射光分别经各自对应的光学镜头在对应的光感测器件的感测面上成像,由光感测器件感测图像后并产生图像信号送入至处理器,并由所述处理器对连续输入的图像信号进行前后对比处理得到光电模组偏移运动时每个光感测器件的偏移量,进而由处理器基于每个光感测器件的偏移量以及偏移运动前后的位置,计算出两光感测器件确定的水平直线的旋转角,即为光电模组的旋转角。
2.根据权利要求1所述的一种可识别旋转角的光电模组,其特征在于,所述处理器为mcu、或cpu、或arm、或dsp。
3.根据权利要求1所述的一种可识别旋转角的光电模组,其特征在于,所述光感测器件为图像采集芯片,或光电传感器。
4.根据权利要求1所述的一种可识别旋转角的光电模组,其特征在于,所述光源为激光或led光源。
5.根据权利要求1所述的一种可识别旋转角的光电模组,其特征在于,所述光学镜头为成像透镜。
6.根据权利要求5所述的一种可识别旋转角的光电模组,其特征在于,成像透镜的物方焦面在相同的水平面上。
7.一种基于权利要求1-6中任意一项所述光电模组的旋转角识别方法,其特征在于,包括以下步骤:
8.根据权利要求7所述的旋转角识别方法,其特征在于,步骤2中,采用向量点积求解法、三角形余弦定理求解法、两直线斜率倾斜夹角求解法、向量叉积反正弦求解法、复数辐角求解法、矩阵求解法中的任意一种求解法,计算得到所述旋转角角度。
9.根据权利要求7所述的旋转角识别方法,其特征在于,步骤2还包括:所述处理器根据两个光感测器件中心线段的长度,以及光电模组当前偏移运动之前两个光感测器件中心连线与坐标系x轴之间的夹角,计算得到光电模组在当前偏移运动之前光感测器件在坐标系中的坐标;并由处理器结合旋转中心与其中任意一个光感测器件之间距离,计算得到光电模组当前偏移运动之前旋转中心在坐标系中的坐标;然后由处理器根据任意一个光感测器件在光电模组当前偏移运动之前的坐标、相应光感测器件的偏移量、旋转角、旋转中心在光电模组当前偏移运动之前的坐标,计算得到旋转中心由于光电模组偏移运动产生的平移量。
技术总结
本发明公开了一种可识别旋转角的光电模组及旋转角识别方法,光电模组包括处理器和两个相同的位移测头,每个位移测头分别包括光源、光感测器件,两个光感测器件分别与处理器电连接;方法中处理器根据两个光感测器件的信号得到每个光感测器件在偏移运动时的偏移量,并建立坐标系中基于偏移量和偏移前后每个光感测器件位置坐标,计算得到旋转角和旋转中心的平移量。本发明在不减少原有光电模组检测的平移增量的基础上,增强了光电模组的运动检测能力,使光电模组对运动检测的结果更为准确,扩展了光电模组的应用场景。
技术研发人员:俞庆平,储鑫
受保护的技术使用者:合肥芯锝电子科技合伙企业(有限合伙)
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!