一种基于海空跨域协同的水质监测巡检方法、装置及设备
本发明涉及水质监测,尤其涉及一种基于海空跨域协同的水质监测巡检方法、装置及设备。
背景技术:
1、无人机、无人艇作为机动性强、灵活性高的两类无人航行器,两者被逐渐应用于各领域,其中也包括水质监测领域。但现阶段大多水质监测大多采用无人机或无人艇单体作业,续航较差的无人机与监测范围受限的无人艇在单体作业不可避免地受限,难以做到区域全覆盖以及复杂多变的水域情况下的采样监测。
2、相应的,对于无人机与无人艇协同的研究主要集中在同作战和无人机与无人艇的协同着陆方面,其中对无人机与无人艇协同进行水质监测的研究尚存在大量空白,对不规则区域的水质监测全覆盖问题还没有适用于二者协同的方案,也没有适应无人机与无人艇协同的高效率巡检规划方案。
3、因此,人们亟需一种高效的海空跨域协同水质监测巡检方案。
技术实现思路
1、有鉴于此,有必要提供一种基于海空跨域协同的水质监测巡检方法、装置及设备,用以解决如何利用无人机与无人艇实现海空跨域协同水质监测巡检的问题。
2、为达到上述技术目的,本发明采取了以下技术方案:
3、第一方面,本发明提供了一种基于海空跨域协同的水质监测巡检方法,包括:
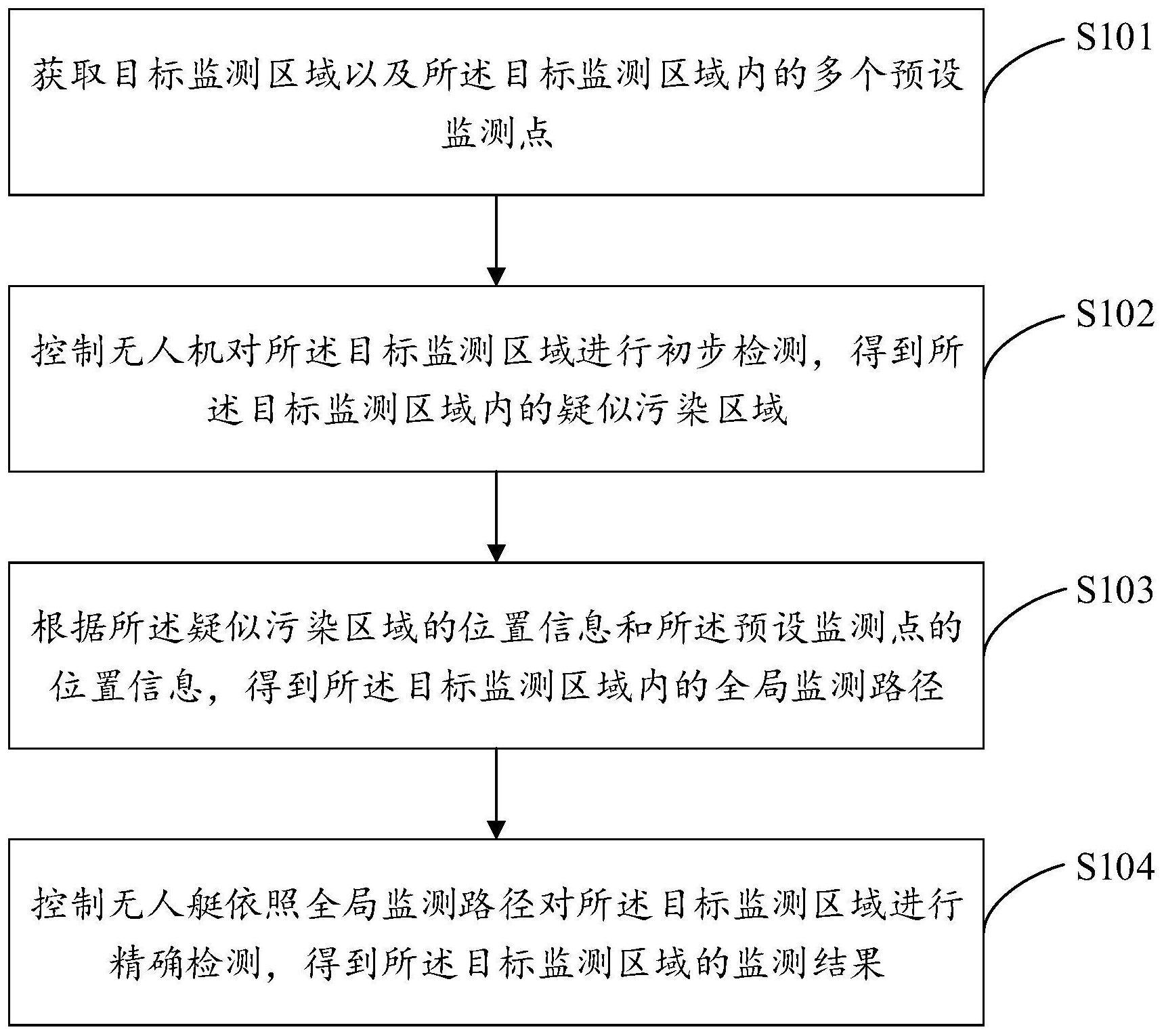
4、获取目标监测区域以及所述目标监测区域内的多个预设监测点;
5、控制无人机对所述目标监测区域进行初步检测,得到所述目标监测区域内的疑似污染区域;
6、根据所述疑似污染区域的位置信息和所述预设监测点的位置信息,得到所述目标监测区域内的全局监测路径;
7、控制无人艇依照全局监测路径对所述目标监测区域进行精确检测,得到所述目标监测区域的监测结果。
8、进一步的,所述获取目标监测区域以及所述目标监测区域内的多个预设监测点,包括:
9、获取监测海域范围,并划分所述监测海域范围,得到多个子区域;
10、分别在每个所述子区域中选取多个预设监测点;
11、根据多个所述子区域的位置关系,得到监测执行顺序;
12、基于所述监测执行顺序,从所述多个子区域中选取所述无人机在当前时刻需要检测的子区域作为目标监测区域,并确定所述目标监测区域内的多个预设监测点;
13、其中,所述监测执行顺序为多个子区域的排列先后顺序。
14、进一步的,多个所述子区域根据所述无人机和所述无人艇之间的通信距离划分,所述无人机和所述无人艇在进行检测时分别保持在两个相邻的子区域内。
15、进一步的,所述根据所述疑似污染区域的位置信息和所述预设监测点的位置信息,得到所述目标监测区域内的全局监测路径,包括:
16、将所述疑似污染区域的位置及所述预设监测点的位置均作为任务监测点;
17、基于路径规划算法计算依次经过所有任务监测点的路径,得到所述全局监测路径。
18、进一步的,所述控制无人机对所述目标监测区域进行初步检测,得到所述目标监测区域内的疑似污染区域,包括:
19、控制无人机对所述目标监测区域进行初步检测,得到所述目标监测区域内的疑似污染区域和障碍物;
20、所述基于路径规划算法计算依次经过所有任务监测点的路径,得到所述全局监测路径,包括:
21、基于路径规划算法计算依次经过所有任务监测点的路径,得到所述初始监测路径;
22、根据所述障碍物的位置信息,基于避障算法计算所述初始监测路径中,相邻的两个任务监测点之间的局部监测路径;
23、根据所述局部监测路径优化所述初始监测路径,得到所述全局监测路径。
24、进一步的,所述基于路径规划算法计算依次经过所有任务监测点的路径,得到所述初始监测路径,包括:
25、根据所述任务监测点,基于所述之间所有可能的路径建立解空间;
26、根据环境参数、无人机参数和无人艇参数,建立信息素评估模型,所述信息素用于表征两个任务监测点之间的代价;
27、在所述解空间中初始化多个蚂蚁,每个蚂蚁在所述解空间中的位置代表一种可能的路径;
28、根据所述信息素评估模型,迭代优化蚂蚁在所述解空间中的位置,得到所述初始监测路径。
29、进一步的,所述根据所述障碍物的位置信息,基于避障算法计算所述初始监测路径中,相邻的两个任务监测点之间的局部监测路径,包括:
30、根据所述初始监测路径,得到相邻的两个任务监测点;
31、根据相邻的两个任务监测点之间的空间范围,建立目标求解空间;
32、以一个任务监测点为根节点,在所述目标求解空间内建立快速探索随机树,所述快速探索随机树的叶节点在所述目标求解空间内随机扩展,且避开所述障碍物,所述快速探索随机树包括一个达到另一个任务监测点的叶节点;
33、根据所述快速探索随机树,得到所述局部监测路径。
34、第二方面,本发明还提供了一种基于海空跨域协同的水质监测巡检装置,包括:
35、参数初始化模块,用于获取目标监测区域以及所述目标监测区域内的多个预设监测点;
36、无人机控制模块,用于控制无人机对所述目标监测区域进行初步检测,得到所述目标监测区域内的疑似污染区域;
37、路径规划模块,用于根据所述疑似污染区域的位置信息和所述预设监测点的位置信息,得到所述目标监测区域内的全局监测路径;
38、无人艇控制模块,用于控制无人艇依照全局监测路径对所述目标监测区域进行精确检测,得到所述目标监测区域的监测结果。
39、第三方面,本发明还提供了一种电子设备,包括存储器和处理器,其中,
40、存储器,用于存储程序;
41、处理器,与存储器耦合,用于执行存储器中存储的程序,以实现上述任一种实现方式中的基于海空跨域协同的水质监测巡检方法中的步骤。
42、第四方面,本发明还提供了一种计算机可读存储介质,用于存储计算机可读取的程序或指令,程序或指令被处理器执行时,能够实现上述任一种实现方式中的基于海空跨域协同的水质监测巡检方法中的步骤。
43、本发明提供一种基于海空跨域协同的水质监测巡检方法、装置及设备,其先获取目标监测区域以及所述目标监测区域内的多个预设监测点,然后控制无人机对所述目标监测区域进行初步检测,得到所述目标监测区域内的疑似污染区域,再根据所述疑似污染区域的位置信息和所述预设监测点的位置信息,得到所述目标监测区域内的全局监测路径,最后控制无人艇依照全局监测路径对所述目标监测区域进行精确检测,得到所述目标监测区域的监测结果。相比于现有技术,本发明提出了一种无人机和无人艇协同配合进行水质监测的具体方案,充分发挥了两种不同设备的优势,使无人艇能够准确地前往目的地进行精确检测,避免了无意义的重复巡航,同时解决了无人机续航乏力的问题,极大地提高了检测效率。
技术特征:
1.一种基于海空跨域协同的水质监测巡检方法,其特征在于,包括:
2.根据权利要求1所述的基于海空跨域协同的水质监测巡检方法,其特征在于,所述获取目标监测区域以及所述目标监测区域内的多个预设监测点,包括:
3.根据权利要求2所述的基于海空跨域协同的水质监测巡检方法,其特征在于,多个所述子区域根据所述无人机和所述无人艇之间的通信距离划分,所述无人机和所述无人艇在进行检测时分别保持在两个相邻的子区域内。
4.根据权利要求1所述的基于海空跨域协同的水质监测巡检方法,其特征在于,所述根据所述疑似污染区域的位置信息和所述预设监测点的位置信息,得到所述目标监测区域内的全局监测路径,包括:
5.根据权利要求4所述的基于海空跨域协同的水质监测巡检方法,其特征在于,所述控制无人机对所述目标监测区域进行初步检测,得到所述目标监测区域内的疑似污染区域,包括:
6.根据权利要求5所述的基于海空跨域协同的水质监测巡检方法,其特征在于,所述基于路径规划算法计算依次经过所有任务监测点的路径,得到所述初始监测路径,包括:
7.根据权利要求5所述的基于海空跨域协同的水质监测巡检方法,其特征在于,所述根据所述障碍物的位置信息,基于避障算法计算所述初始监测路径中,相邻的两个任务监测点之间的局部监测路径,包括:
8.一种基于海空跨域协同的水质监测巡检装置,其特征在于,包括:
9.一种电子设备,其特征在于,包括存储器和处理器,其中,
10.一种计算机可读存储介质,其特征在于,用于存储计算机可读取的程序或指令,所述程序或指令被处理器执行时,能够实现上述权利要求1至7中任一项所述基于海空跨域协同的水质监测巡检方法中的步骤。
技术总结
本发明涉及一种基于海空跨域协同的水质监测巡检方法、装置及设备,其先获取目标监测区域以及多个预设监测点,然后控制无人机对所述目标监测区域进行初步检测,得到疑似污染区域,再根据所述疑似污染区域的位置信息和所述预设监测点的位置信息,得到所述目标监测区域内的全局监测路径,最后控制无人艇依照全局监测路径对所述目标监测区域进行精确检测,得到所述目标监测区域的监测结果。相比于现有技术,本发明提出了一种无人机和无人艇协同配合进行水质监测的具体方案,充分发挥了两种不同设备的优势,使无人艇能够准确地前往目的地进行精确检测,避免了无意义的重复巡航,同时解决了无人机续航乏力的问题,极大地提高了检测效率。
技术研发人员:黄亮,闫铭涵,郝悦婷,曹丰智,马宗仁,吴康城,许珂颖
受保护的技术使用者:武汉理工大学
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!