一种目标距离和速度测量方法与流程
本发明实施例涉及雷达,尤其涉及一种目标距离和速度测量方法。
背景技术:
1、伴随着汽车行业的蓬勃发展,出于降低交通事故发生率、辅助驾驶等目的,雷达越来越多的配备在汽车上,成为了汽车驾驶辅助系统的一部分。
2、目前,通常是使用调频连续波(frequency modulated continuous wave,fmcw)波形的多输入多输出(multiple-input multiple-output,mimo)雷达,其距离分辨率和带宽成反比,带宽越宽距离分辨率越高,带宽相同的情况下采样点数越多测距范围越远。但是,由于mimo雷达的硬件中频带宽及采样率的限制,雷达的距离分辨率无法过高,从而影响了雷达的目标距离的测量精度;此外,由于慢时间维的采样率有限,时分复用的mimo雷达往往会存在速度模糊的现象,不模糊速度范围较低,无法满足汽车雷达的测速范围,从而影响了雷达的目标速度的测量精度。
3、故,如何提高上述mimo雷达的目标距离和速度的测量精度是当前亟待解决的技术问题。
技术实现思路
1、本发明实施例提供了一种目标距离和速度测量方法,以目标距离和速度的测量精度。
2、根据本发明实施例的一方面,提供了一种目标距离和速度测量方法,包括:
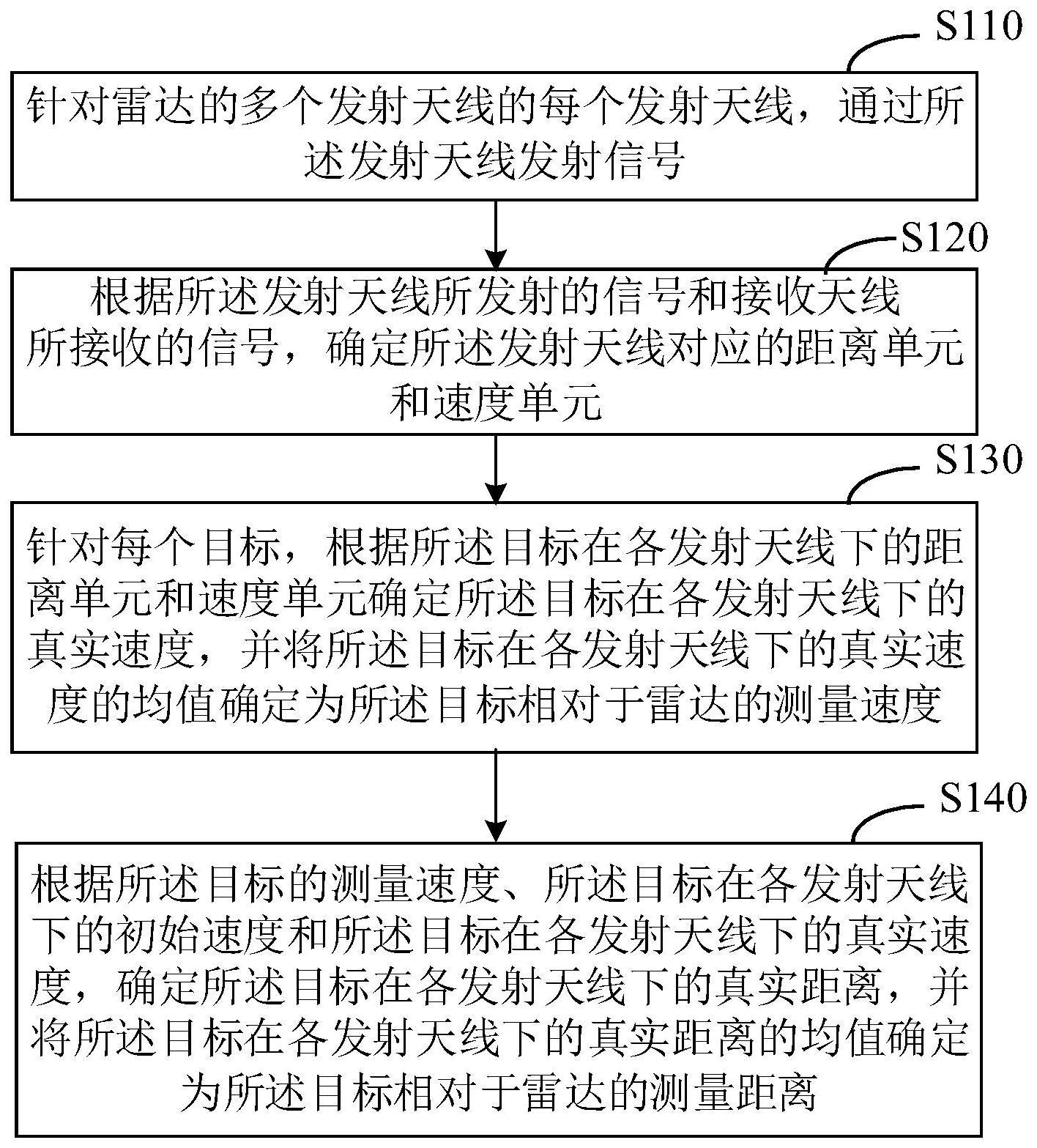
3、针对所述雷达的多个发射天线的每个发射天线,通过所述发射天线发射信号,其中,各发射天线中编号相邻的发射天线的中心频率差不同,各发射天线的慢时间维斜率不同,各发射天线的斜坡数相同,各发射天线的斜坡持续时长相同,各发射天线的快时间维带宽相同,各发射天线的快时间维采样点数相同,所述中心频率差为所述发射天线中相邻斜坡的中心频率的差值;
4、根据所述发射天线所发射的信号和接收天线所接收的信号,确定所述发射天线对应的距离单元和速度单元,其中,所接收的信号为目标对所述所发射的信号所反射的信号,所述目标为所述雷达探测的对象,所述目标为至少一个;
5、针对每个目标,根据所述目标在各发射天线下的距离单元和速度单元确定所述目标在各发射天线下的真实速度,并将所述目标在各发射天线下的真实速度的均值确定为所述目标相对于雷达的测量速度;
6、根据所述目标的测量速度、所述目标在各发射天线下的初始速度和所述目标在各发射天线下的真实速度,确定所述目标在各发射天线下的真实距离,并将所述目标在各发射天线下的真实距离的均值确定为所述目标相对于雷达的测量距离。
7、根据本发明实施例的另一方面,提供了一种目标距离和速度测量装置,包括:
8、发射模块,用于针对所述雷达的多个发射天线的每个发射天线,通过所述发射天线发射信号,其中,各发射天线中编号相邻的发射天线的中心频率差不同,各发射天线的慢时间维斜率不同,各发射天线的斜坡数相同,各发射天线的斜坡持续时长相同,各发射天线的快时间维带宽相同,各发射天线的快时间维采样点数相同,所述中心频率差为所述发射天线中相邻斜坡的中心频率的差值;
9、单元确定模块,用于根据所述发射天线所发射的信号和接收天线所接收的信号,确定所述发射天线对应的距离单元和速度单元,其中,所接收的信号为目标对所述所发射的信号所反射的信号,所述目标为所述雷达探测的对象,所述目标为至少一个;
10、速度确定模块,用于针对每个目标,根据所述目标在各发射天线下的距离单元和速度单元确定所述目标在各发射天线下的真实速度,并将所述目标在各发射天线下的真实速度的均值确定为所述目标相对于雷达的测量速度;
11、距离确定模块,用于根据所述目标的测量速度、所述目标在各发射天线下的初始速度和所述目标在各发射天线下的真实速度,确定所述目标在各发射天线下的真实距离,并将所述目标在各发射天线下的真实距离的均值确定为所述目标相对于雷达的测量距离。
12、根据本发明实施例的另一方面,提供了一种雷达,所述雷达包括:
13、至少一个处理器;以及
14、与所述至少一个处理器通信连接的存储器;其中,
15、所述存储器存储有可被所述至少一个处理器执行的计算机程序,所述计算机程序被所述至少一个处理器执行,以使所述至少一个处理器能够执行本发明任一实施例所述的目标距离和速度测量方法。
16、根据本发明实施例的另一方面,提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机指令,所述计算机指令用于使处理器执行时实现本发明任一实施例所述的目标距离和速度测量方法。
17、本发明实施例的技术方案,首先针对雷达的多个发射天线的每个发射天线,通过发射天线发射信号,其中,各发射天线中编号相邻的发射天线的中心频率差不同,各发射天线的慢时间维斜率不同,各发射天线的斜坡数相同,各发射天线的斜坡持续时长相同,各发射天线的快时间维带宽相同,各发射天线的快时间维采样点数相同,中心频率差为所述发射天线中相邻斜坡的中心频率的差值;然后根据发射天线所发射的信号和接收天线所接收的信号,确定发射天线对应的距离单元和速度单元,其中,所接收的信号为目标对所述所发射的信号所反射的信号,目标为雷达探测的对象,目标为至少一个;之后针对每个目标,根据目标在各发射天线下的距离单元和速度单元确定目标在各发射天线下的真实速度,并将目标在各发射天线下的真实速度的均值确定为目标相对于雷达的测量速度;最后根据目标的测量速度、目标在各发射天线下的初始速度和目标在各发射天线下的真实速度,确定目标在各发射天线下的真实距离,并将目标在各发射天线下的真实距离的均值确定为目标相对于雷达的测量距离。本技术方案,通过设置各发射天线的中心频率差、慢时间维斜率、斜坡数、斜坡持续时长、快时间维带宽和快时间维采样点数,以发射出符合条件的信号;在此基础上通过发射天线所发射和接收的信号进行相应的处理能够得到目标相对于雷达的测量速度和测量距离,从而提高目标距离和速度的测量精度。
18、应当理解,本部分所描述的内容并非旨在标识本发明的实施例的关键或重要特征,也不用于限制本发明的范围。本发明的其它特征将通过以下的说明书而变得容易理解。
技术特征:
1.一种目标距离和速度测量方法,其特征在于,应用于雷达,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,根据所述发射天线所发射的信号和接收天线所接收的信号,确定所述发射天线对应的距离单元和速度单元,包括:
3.根据权利要求1所述的方法,其特征在于,根据所述目标在各发射天线下的距离单元和速度单元确定所述目标在各发射天线下的真实速度,包括:
4.根据权利要求3所述的方法,其特征在于,根据所述目标在所述发射天线下的距离单元、速度单元和所述发射天线的慢时间维斜率符号,确定所述目标在所述发射天线下的初始速度和初始距离,包括:
5.根据权利要求3所述的方法,其特征在于,根据所述发射天线的不模糊系数、所述目标在所述发射天线下的初始速度和所述发射天线的最大不模糊速度确定所述目标在所述发射天线下的真实速度,包括:
6.根据权利要求3所述的方法,其特征在于,确定各发射天线的不模糊系数,包括:
7.根据权利要求1所述的方法,其特征在于,根据所述目标的测量速度、所述目标在各发射天线下的初始速度和所述目标在各发射天线下的真实速度,确定所述目标在各发射天线下的真实距离,包括:
8.一种目标距离和速度测量装置,其特征在于,配置于雷达,包括:
9.一种雷达,其特征在于,所述雷达包括:
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有计算机指令,所述计算机指令用于使处理器执行时实现权利要求1-7中任一项所述的目标距离和速度测量方法。
技术总结
本发明实施例公开了一种目标距离和速度测量方法。包括:通过发射天线发射信号,各发射天线的慢时间维斜率不同;确定发射天线对应的距离单元和速度单元;确定目标在各发射天线下的真实速度,并将目标在各发射天线下的真实速度的均值确定为目标的测量速度;确定目标在各发射天线下的真实距离,并将目标在各发射天线下的真实距离的均值确定为目标的测量距离。该方法通过设置各发射天线的慢时间维斜率、斜坡数、斜坡持续时长、快时间维带宽等以发射出符合条件的信号;在此基础上通过发射天线所发射和接收的信号进行相应的处理能够得到目标相对于雷达的测量速度和测量距离,从而提高目标距离和速度的测量精度。
技术研发人员:韩伟,田烨,陈军
受保护的技术使用者:上海金脉电子科技有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!