一种基于非高斯噪声的异步电机电流传感器故障校正方法
本发明涉及电机故障诊断领域,尤其是涉及一种基于非高斯噪声的异步电机电流传感器故障校正方法。
背景技术:
1、现有研究在电流传感器发生故障后大部分是通过构建观测器估计电流,用观测器的估计值取代故障相电流从而避免故障电流传感器对系统性能的影响。如:在两相电流传感器均故障时,基于李亚普诺夫稳定性定理设计自适应反推观测器进行电流估计,以确保系统稳定运行;利用二阶广义积分器–锁频环重构故障电流信息,并将其反馈到基于滑模观测器的速度估计方案中,实现电流和转速的同时估计,从而实现电流传感器的容错控制。
2、但是,由于异步电机高耦合等特点,在电流传感器发生故障时,系统噪声实际应该为非高斯分布,但是对于非高斯分布的噪声目前没有很好的研究方法,传统的龙伯格观测器无法很好地进行对异步电机电流传感器的非高斯分布的噪声的故障校正。
技术实现思路
1、本发明的目的就是为了克服上述困难而提供的一种基于非高斯噪声的异步电机电流传感器故障校正方法。
2、本发明的目的可以通过以下技术方案来实现:
3、一种基于非高斯噪声的异步电机电流传感器故障校正方法,方法包括以下步骤:
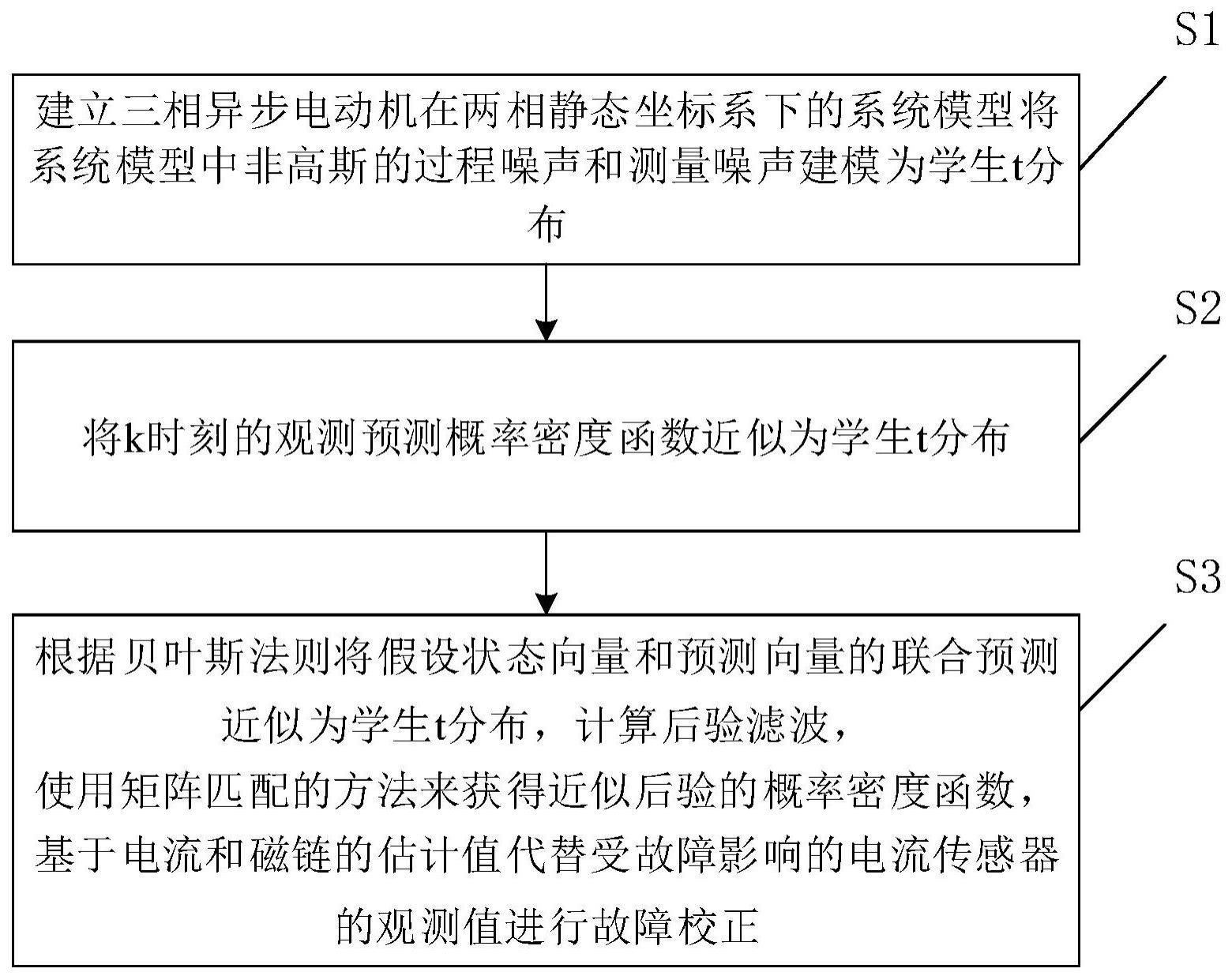
4、s1、建立三相异步电动机在两相静态坐标系下的系统模型,同时将系统模型中非高斯的过程噪声和测量噪声建模为学生t分布;
5、s2、根据s1的系统模型计算k时刻的状态预测概率密度函数p(xk|yk-1),并将状态预测概率密度函数p(xk|yk-1)近似为学生t分布,同时将k时刻的观测预测概率密度函数p(yk|yk-1)近似为学生t分布;
6、s3、根据贝叶斯法则将假设状态向量和预测向量的联合预测p(xk,yk|yk-1)近似为学生t分布,计算后验滤波p(xk|yk),使用矩阵匹配的方法来获得近似后验的概率密度函数其中xk表示状态变量,表示均值,pk|k表示尺度矩阵,η表示学生t分布的自由度,将均值作为电流传感器故障时的电流和磁链的估计值,基于电流和磁链的估计值代替受故障影响的电流传感器的观测值进行故障校正。
7、进一步地,k时刻的状态预测概率密度函数p(xk|yk-1)为:
8、
9、其中,p(xk|yk-1)为k时刻的状态预测概率密度函数,p(xk-1|yk-1)为k-1时刻的状态预测概率密度函数,为k-1时刻的电流和磁链的估计值,pk-1|k-1为k-1时刻的估计误差协方差,p(xk|xk-1)为在状态变量xk-1条件下,状态变量xk的概率密度函数,f(xk-1)为非线性状态传播方程,qk-1为k-1时刻过程噪声协方差矩阵,η表示学生t分布的自由度。
10、进一步地,k时刻的状态预测概率密度函数p(xk|yk-1)的学生t分布形式为:
11、
12、其中,xk为k时刻的状态变量,为k时刻的状态预测值,pk|k-1为k时刻的状态预测误差协方差,η表示学生t分布的自由度。
13、进一步地,k时刻的观测预测概率密度函数p(yk|yk)近似的学生t分布为:
14、
15、其中,yk为k时刻的观测量,为观测预测值,为观测误差协方差,η表示学生t分布的自由度。
16、进一步地,状态向量和预测向量的联合预测p(xk,yk|yk-1)近似的学生t分布为:
17、
18、其中,yk为k时刻的观测量,xk为k时刻的状态变量,为k时刻的状态预测值,为观测预测值,pk|k-1为k时刻的状态预测误差协方差,为状态和观测的预测误差协方差,为观测误差协方差。
19、进一步地,后验滤波p(xk|yk)为:
20、
21、其中,p(yk|yk-1)为k时刻的观测预测概率密度函数,xk为k时刻的状态变量,为状态估计值,p′k|k为状态估计误差协方差,η'为更新后的参数。
22、进一步地,观测预测值为:
23、
24、其中,
25、
26、pk|k-1为k时刻的状态预测误差协方差,为k时刻的状态预测值。
27、进一步地,更新后的参数η'为:
28、η'=η+dy
29、其中,η表示学生t分布的自由度,dy为观测变量y的维数。
30、进一步地,矩阵匹配后,得到的均值为:
31、
32、其中,为状态估计值;
33、尺度矩阵pk|k为:
34、
35、其中,p′kk为k时刻的估计误差协方差,η'为更新后的参数,η表示学生t分布的自由度。
36、进一步地,状态估计值为:
37、
38、其中,
39、
40、为k时刻的状态预测值,kk为滤波增益,yk为k时刻的观测量,
41、k时刻的估计误差协方差p′kk为:
42、
43、其中,yk为k时刻的观测量,dy为观测变量y的维数,为k时刻的状态预测值,为观测误差协方差,kk为滤波增益。
44、与现有技术相比,本发明具有以下有益效果:
45、本发明针对系统噪声为非高斯噪声时,考虑过程噪声和测量噪声均满足学生t分布。在两相电流传感器均故障时,提出一种电流传感器的观测值的校正方法,用该方法估计相电流,用估计值来替代受故障影响的电流传感器的观测值,对实际的噪声进行更高的故障校正。
技术特征:
1.一种基于非高斯噪声的异步电机电流传感器故障校正方法,其特征在于,方法包括以下步骤:
2.根据权利要求1所述的一种基于非高斯噪声的异步电机电流传感器故障校正方法,其特征在于,k时刻的状态预测概率密度函数p(xk|yk-1)为:
3.根据权利要求2所述的一种基于非高斯噪声的异步电机电流传感器故障校正方法,其特征在于,k时刻的状态预测概率密度函数p(xk|yk-1)的学生t分布形式为:
4.根据权利要求3所述的一种基于非高斯噪声的异步电机电流传感器故障校正方法,其特征在于,k时刻的观测预测概率密度函数p(yk|yk)近似的学生t分布为:
5.根据权利要求4所述的一种基于非高斯噪声的异步电机电流传感器故障校正方法,其特征在于,状态向量和预测向量的联合预测p(xk,yk|yk-1)近似的学生t分布为:
6.根据权利要求5所述的一种基于非高斯噪声的异步电机电流传感器故障校正方法,其特征在于,后验滤波p(xk|yk)为:
7.根据权利要求6所述的一种基于非高斯噪声的异步电机电流传感器故障校正方法,其特征在于,观测预测值为:
8.根据权利要求6所述的一种基于非高斯噪声的异步电机电流传感器故障校正方法,其特征在于,更新后的参数η'为:
9.根据权利要求8所述的一种基于非高斯噪声的异步电机电流传感器故障校正方法,其特征在于,矩阵匹配后,得到的均值为:
10.根据权利要求9所述的一种基于非高斯噪声的异步电机电流传感器故障校正方法,其特征在于,状态估计值为:
技术总结
本发明涉及一种基于非高斯噪声的异步电机电流传感器故障校正方法,方法包括以下步骤:S1、建立三相异步电动机在两相静态坐标系下的系统模型,同时将系统模型中非高斯的过程噪声和测量噪声建模为学生t分布;S2、同时将k时刻的观测预测概率密度函数近似为学生t分布;S3、根据贝叶斯法则将假设状态向量和预测向量的联合预测近似为学生t分布,计算后验滤波,使用矩阵匹配的方法来获得近似后验的概率密度函数,将均值作为电流传感器故障时的电流和磁链的估计值,进行故障校正。与现有技术相比,本发明具有对实际的噪声进行更高的故障校正等优点。
技术研发人员:肖丽,冯肖亮
受保护的技术使用者:上海电机学院
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!