一种车辆铰接角的测量方法、设备、车辆及介质与流程
本发明涉及车辆,具体涉及一种车辆铰接角的测量方法、设备车辆及介质。
背景技术:
1、在铰接式车辆前进时牵引车与半挂车之间会有铰接形成的夹角,例如重型卡车在转弯时,牵引车先转弯,再由铰接带动半挂车后转弯,从而形成牵引车与半挂车之间的夹角,通常称该夹角为铰接角。现有测量铰接角的方法有三种,分别是利用角度传感器、磁力传感器和激光雷达。利用角度传感器需要在牵引车和半挂车连接的牵引销处,安装其他机械结构,会对原有机械结构产生一定影响,也会对重型卡车造成安全风险。利用磁力传感器需要在重型卡车上安装磁场发射设备和接收设备,然而磁场的抗干扰能力较差,导致失败不准确。采用激光雷达获取牵引车与半挂车之间的相对位置数据,通过数据分析技术计算出两者之间相对夹角,作为铰接角的估计。但是由于激光雷达量测的数据范围较大,不同型号车辆以及多边的环境,使得雷达易受到复杂影响,导致获取的点云数据中噪声较多,给铰接角的准确估计带来挑战。
2、基于上述技术问题,申请人提出了本申请的技术方案。
技术实现思路
1、本发明的目的是提供了一种车辆铰接角的测量方法、设备车辆及介质,利用激光雷达采集点云数据,将上一时刻的角度参数参与到感兴趣区域和测量角度的确定中,再使用卡尔曼滤波算法得到铰接角的最终角度,使得铰接角的测量方式更加稳定、精准,且易于推广实施。
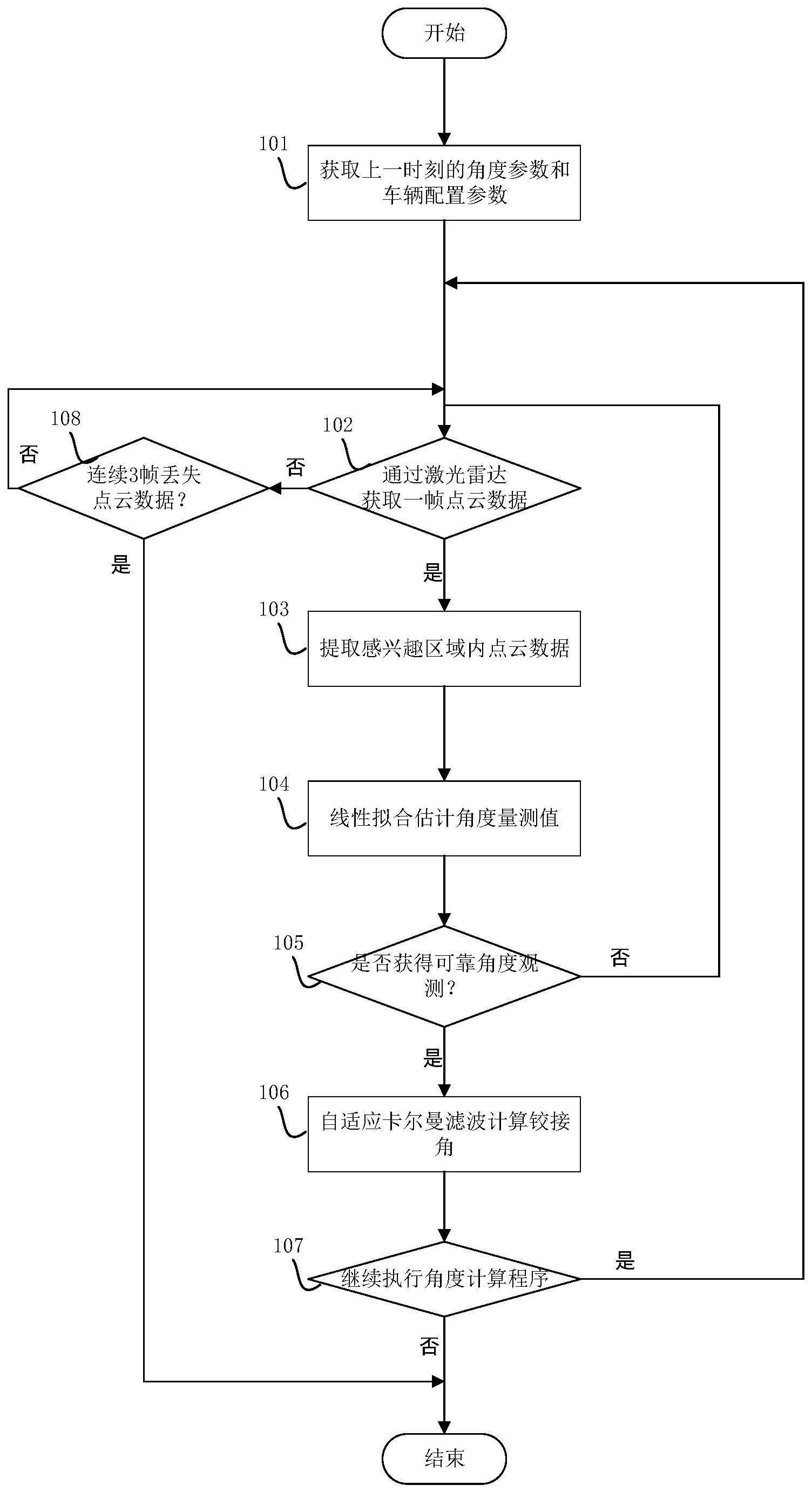
2、为实现上述目的,本发明提供了一种车辆铰接角的测量方法,所述车辆包括牵引车、以及与所述牵引车铰接的半挂车,所述铰接角为所述牵引车与所述半挂车之间的夹角;所述方法包括:
3、获取所述铰接角在上一时刻的第一角度参数和车辆配置参数,通过所述牵引车的激光雷达采集原始点云数据;
4、根据所述在上一时刻的第一角度参数和所述车辆配置参数确定感兴趣区域,并基于所述感兴趣区域从所述原始点云数据中选择目标点云数据;
5、根据所述目标点云数据,得到所述铰接角在当前时刻的第二角度参数;
6、根据所述在上一时刻的第一角度参数和所述在当前时刻的第二角度参数,通过卡尔曼滤波算法得到在当前时刻所述铰接角的最终角度参数。
7、本发明提供一种车辆铰接角的测量设备,所述测量设备用于执行上述的车辆铰接角的测量方法。
8、本发明提供一种车辆,包括上述的车辆铰接角的测量设备。
9、本发明还提供一种非暂态计算机可读存储介质,所述非暂态计算机可读存储介质上存储有处理器可执行指令,所述可执行指令被配置为可执行上述的车辆铰接角的测量方法。
10、在一个实施例中,所述根据所述在上一时刻的第一角度参数和所述车辆配置参数确定感兴趣区域,并基于所述感兴趣区域从所述原始点云数据中选择目标点云数据,包括:
11、以预设点为中心,以距离所述预设点设定长度为半径的圆周为边界,确定点云粗筛区域,并提取落入所述点云粗筛区域中的粗筛点云数据;
12、若获取到所述第一角度参数,则确定第一角度范围,并对所述第一角度范围进行切分,得到多个假设角度;
13、若获取不到所述第一角度参数,则对预设的第二角度范围进行切分,得到所述多个假设角度;
14、根据所述多个假设角度和所述车辆配置参数确定多个感兴趣区域,并对落入所述各感兴趣区域中的所述粗筛点云数据进行计数,根据计数结果选择目标感兴趣区域;
15、将落入所述目标感兴趣区域中的粗筛点云数据作为目标点云数据。
16、在一个实施例中,所述根据所述多个假设角度和所述车辆配置参数确定多个感兴趣区域,并对落入所述各感兴趣区域中的所述粗筛点云数据进行计数,根据计数结果选择目标感兴趣区域,包括:
17、针对每个所述假设角度,基于所述假设角度与所述车辆配置参数,确定出多个边界角点,并将所述多个边界角点合围形成与所述假设角度对应的感兴趣区域;
18、分别计算落入所述多个感兴趣区域中的所述粗筛点云数据的点数,并对多个所述点数进行排序;
19、将具有最大的所述点云数量对应的一个感兴趣区域作为目标感兴趣区域。
20、在一个实施例中,所述感兴趣区域为矩形区域,所述矩形区域中四个边界角点的坐标通过以下方式得到:
21、
22、
23、
24、
25、
26、其中,xc、yc表示所述矩形区域一个边界角点点c的坐标;xd、yd表示所述矩形区域一个边界角点点d的坐标,xe、ye表示所述矩形区域一个边界角点点e的坐标,xf、yf表示所述矩形区域一个边界角点点f的坐标;r表示旋转矩阵,α表示一个假设角度,dw表示装载在所述半挂车上的集装箱横向宽度的一半,do表示所述集装箱的前面板与所述半挂车上铰接点之间的在车辆前进方向上的纵向距离,db表示所述激光雷达与所述铰接点之间的纵向距离,δ表示容错长度。
27、在一个实施例中,所述铰接角的初始角度参数包括初始铰接角度和初始铰接角速度,所述预测角度参数包括预测铰接角度和预测铰接角速度,所述最终角度参数包括最终铰接角度和最终铰接角速度。
28、在一个实施例中,所述第一角度范围为[α1-π/8,α1+π/8],其中α1表示所述第一角度参数,所述对所述第一角度范围进行切分是以预设弧度为步长进行切分。
29、在一个实施例中,所述第二角度范围为[-π/2,π/2],所述对所述第二角度范围进行切分是以预设弧度为步长进行切分。
技术特征:
1.一种车辆铰接角的测量方法,其特征在于,所述车辆包括牵引车、以及与所述牵引车铰接的半挂车,所述铰接角为所述牵引车与所述半挂车之间的夹角;所述方法包括:
2.根据权利要求1所述的车辆铰接角的测量方法,其特征在于,所述根据所述在上一时刻的第一角度参数和所述车辆配置参数确定感兴趣区域,并基于所述感兴趣区域从所述原始点云数据中选择目标点云数据,包括:
3.根据权利要求2所述的车辆铰接角的测量方法,其特征在于,所述根据所述多个假设角度和所述车辆配置参数确定多个感兴趣区域,并对落入所述各感兴趣区域中的所述粗筛点云数据进行计数,根据计数结果选择目标感兴趣区域,包括:
4.根据权利要求3所述的车辆铰接角的测量方法,其特征在于,所述感兴趣区域为矩形区域,所述矩形区域中四个边界角点的坐标通过以下方式得到:
5.根据权利要求1所述的车辆铰接角的测量方法,其特征在于,所述铰接角的初始角度参数包括初始铰接角度和初始铰接角速度,所述预测角度参数包括预测铰接角度和预测铰接角速度,所述最终角度参数包括最终铰接角度和最终铰接角速度。
6.根据权利要求2所述的车辆铰接角的测量方法,其特征在于,所述第一角度范围为[α1-π/8,α1+π/8],其中α1表示所述第一角度参数,所述对所述第一角度范围进行切分是以预设弧度为步长进行切分。
7.根据权利要求2所述的车辆铰接角的测量方法,其特征在于,所述第二角度范围为[-π/2,π/2],所述对所述第二角度范围进行切分是以预设弧度为步长进行切分。
8.一种车辆铰接角的测量设备,其特征在于,所述测量设备用于执行权利要求1至7中任一项所述的车辆铰接角的测量方法。
9.一种车辆,其特征在于,包括所述权利要求8中所述的车辆铰接角的测量设备。
10.一种非暂态计算机可读存储介质,其特征在于,所述非暂态计算机可读存储介质上存储有处理器可执行指令,所述可执行指令被配置为可执行如权利要求1~7中任意一项所述的车辆铰接角的测量方法。
技术总结
本发明实施例提供了一种车辆铰接角的测量方法、设备车辆及介质,涉及车辆技术领域。方法包括:获取铰接角在上一时刻的第一角度参数和车辆配置参数,通过牵引车的激光雷达采集原始点云数据;根据在上一时刻的第一角度参数和车辆配置参数确定感兴趣区域,并基于感兴趣区域从原始点云数据中选择目标点云数据,得到铰接角在当前时刻的第二角度参数;通过卡尔曼滤波算法得到在当前时刻铰接角的最终角度参数。本发明利用激光雷达采集点云数据,将上一时刻的角度参数参与到感兴趣区域和测量角度的确定中,再使用卡尔曼滤波算法得到铰接角的最终角度,使得铰接角的测量方式更加稳定、精准,且易于推广实施。
技术研发人员:代堃鹏,殷承良,秦文刚
受保护的技术使用者:上海智能网联汽车技术中心有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!