一种三层柔性关节多柔体耦合结构的振动测控装置及方法
本发明涉及振动测量控制领域,特别涉及一种三层柔性关节多柔体耦合结构的振动测控装置及方法。
背景技术:
1、随着国民经济和国防技术的进步,复杂机械系统大量采用轻质柔性材料,系统运行速度加快,运行精度要求不断提高,系统的动力学性态也越来越复杂,简单地将部件作刚体假设的多刚体系统动力学与控制研究已无法满足实践需求,必须考虑部件大范围运动和构件本身的变形,这类系统称为柔性多体耦合系统。例如,对于高速机车系统,车厢、转向架构成的整车是典型多体系统,高速情形下车辆稳定性与乘坐舒适性的优化设计必须考虑车厢柔性特征,还应考虑轨线、授电弓网与整车的耦合。此外,高速机械系统、现代国防技术都与柔性多体系统研究密切相关。
2、为了确保各种柔性装置的正常运作,对柔性结构的振动机理和控制策略进行研究势在必行。最早人们是采用隔振、附加阻尼块等被动控制方法对柔性结构的振动进行抑制。但是柔性结构的低频模态密集,振动耦合度高,对于振动控制要求很高,传统的控制结构和方法很难满足要求。近年各种智能控制算法的提出很好的处理了振动自由度高、非线性因素多等各方面的问题,为柔性结构的振动主动控制提供了新思路,也成为了当前工程领域的一大研究热点。
3、综上所述,在不改变结构特性的前提下搭建柔性结构的检测系统,分析结构的振动特性,对后续进行抑制的研究具有重要的实际工程意义。
技术实现思路
1、为了克服现有技术的上述缺点与不足,本发明的目的在于提供一种三层柔性关节多柔体耦合结构的振动测控装置及方法。
2、本发明的目的通过以下技术方案实现:
3、一种三层柔性关节多柔.体耦合结构的振动测控装置,包括:
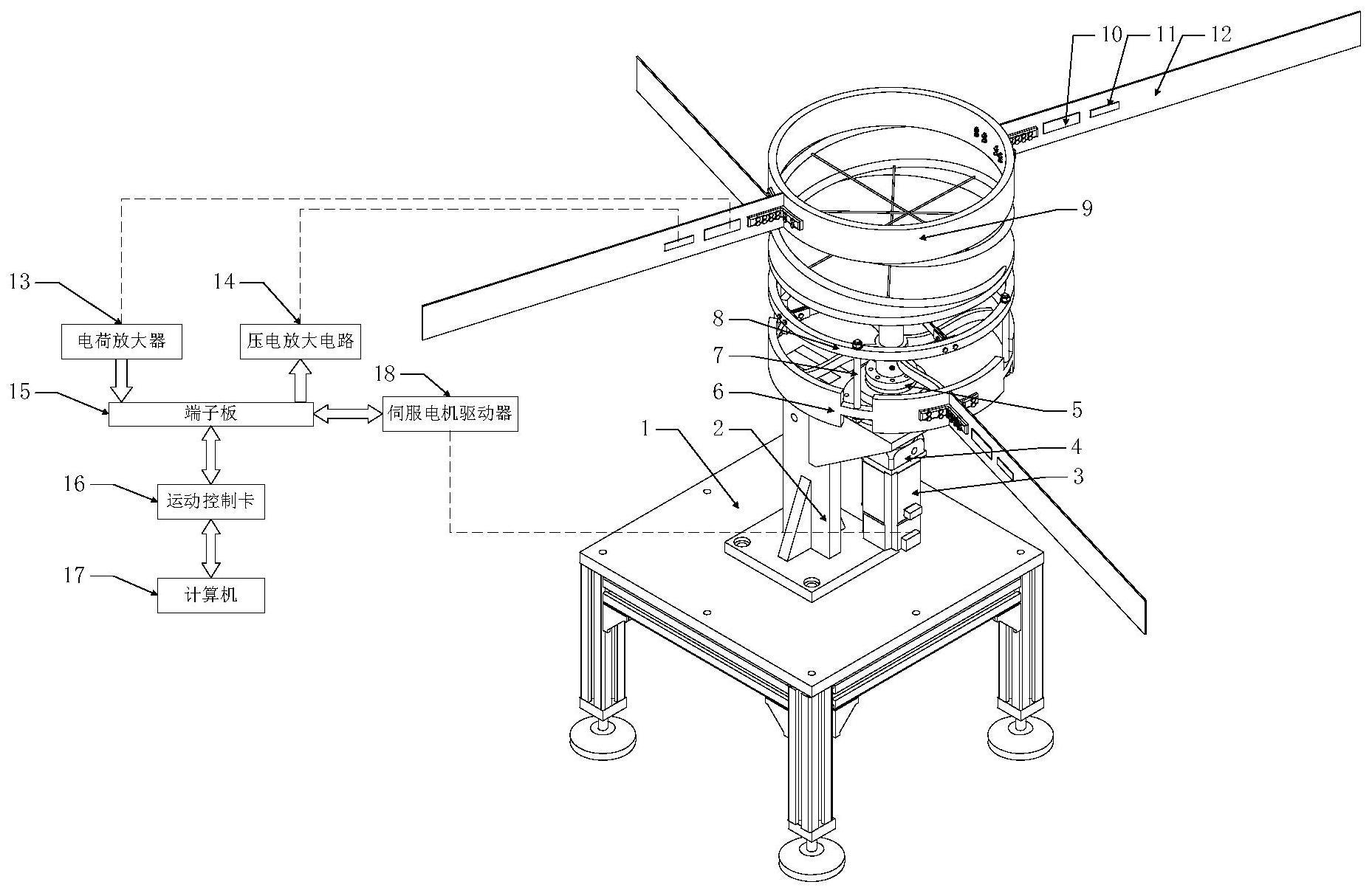
4、柔性结构,包括间隔距离设置的三层结构及中间轴,所述下层结构的外圈与中层结构的外圈通过刚性杆连接,所述中层结构的内圈与上层结构的内圈连接,三层结构均与中间轴连接,中间轴通过减速机与电机连接,电机驱动柔性结构运动;
5、所述下层结构包括相互连接的柔性圆环与下层柔性悬臂梁;
6、所述中层结构包括相互连接的刚性圆环及中层柔性梁;
7、所述上层结构包括相互连接的dna状柔性圆环与上层柔性悬臂梁;
8、振动检测部分,用于检测柔性结构中上层柔性悬臂梁及下层柔性悬臂梁的振动信号;
9、驱动控制部分,根据检测的振动信号控制上层及下层柔性悬臂梁的振动。
10、进一步,上层柔性悬臂梁及下层柔性悬臂梁均为两根,下层柔性悬臂梁与上层柔性悬臂梁之间的投影夹角保持为90度。
11、进一步,所述振动检测部分包括压电传感器,分别设置在上层柔性悬臂梁及下层柔性悬臂梁上。
12、进一步,所述驱动控制部分包括压电驱动器、压电放大电路、电荷放大器、端子板、伺服电机驱动器、运动控制卡和计算机,压电驱动器设置于每一根柔性悬臂梁上,压电放大电路与压电驱动器连接,电荷放大器与压电传感器连接,压电放大电路、电荷放大器分别与端子板连接,计算机与运动控制卡连接;计算机接收压电传感器、的检测信号经过处理得到控制信号,通过运动控制卡及端子板输出到压电放大电路,通过压电驱动器控制每一根柔性悬臂梁的振动。
13、进一步,所述dna状柔性圆环具体是外圈为螺旋线形状,螺距120mm,圈数为3圈,起始角度为270度。
14、进一步,所述压电传感器安装在上层柔性悬臂梁及下层柔性悬臂梁的宽度方向中心线,双面粘贴,每一个柔性悬臂梁各粘贴两片。
15、进一步,所述压电驱动器安装在四根柔性悬臂梁宽度方向中心线,且双面粘贴,每一根柔性悬臂梁各粘贴两片。
16、进一步,还包括阶梯轴和弹性挡圈用于对中层结构和上层结构的轴向限位。
17、进一步,所述柔性结构通过竖直方杆与试验台连接。
18、一种所述的振动测控装置的方法,包括:
19、步骤一:开始并初始化各部分装置,控制电机的转动和停止,使振动测控装置产生受迫振动;
20、步骤二:振动检测部分检测每一根柔性悬臂梁的振动;
21、步骤三:振动检测部分输入驱动控制部分,进行处理后得到控制信号,控制每一根柔性悬臂梁的振动
22、步骤四:通过改变电机转速与控制的参数,反复实验,获取多次实验结果,对比寻找最优控制参数。
23、与现有技术相比,本发明具有以下优点和有益效果:
24、(1)本发明通过合理的机械结构设计,将多根柔性梁固定在一起形成一个完整的机构,并进行耦合,信号经由计算机输入到伺服电机,进而控制电机的旋转与停止,当伺服电机停止运转时,由于转动惯量的影响,运动趋势仍然存在,因此整体结构有保持原有运动状态的趋势,而整体结构为柔性耦合结构,因此各部分运动状态不一致,这就导致振动的产生,具体表现为:上层结构外侧柔性悬臂梁的振动经圆盘传递给下方dna状柔性结构,dna状柔性结构再将振动量传递给联轴器,进而带动与之连接的中层结构的振动,即中层结构将联轴器传递来的振动量从内圈柔性连接结构传递到外圈,而外圈圆盘与底层结构外圈通过圆杆进行连接,因此底层结构外圈也被带动起来,进而带动底层结构外侧柔性梁的振动,有效地消除了其它不可控因素对于振动控制效果的影响。
25、(2)本发明采用压电传感器测量柔性梁的应变信息,能快速反应机械臂的多个低阶模态的振动信息,测量灵敏度好。
26、(3)本发明通过测量多个位置的多阶模态进行检测,相较于现有技术,其优势在于:系统结构简单,易于操作;可多点检测,减小实验误差,提高测量精度等。
技术特征:
1.一种三层柔性关节多柔体耦合结构的振动测控装置,其特征在于,包括:
2.根据权利要求1所述的振动测控装置,其特征在于,上层柔性悬臂梁及下层柔性悬臂梁均为两根,下层柔性悬臂梁与上层柔性悬臂梁之间的投影夹角保持为90度。
3.根据权利要求1所述的振动测控装置,其特征在于,所述振动检测部分包括压电传感器,分别设置在上层柔性悬臂梁及下层柔性悬臂梁上。
4.根据权利要求1所述的振动测控装置,其特征在于,所述驱动控制部分包括压电驱动器、压电放大电路、电荷放大器、端子板、伺服电机驱动器、运动控制卡和计算机,压电驱动器设置于每一根柔性悬臂梁上,压电放大电路与压电驱动器连接,电荷放大器与压电传感器连接,压电放大电路、电荷放大器分别与端子板连接,计算机与运动控制卡连接;计算机接收压电传感器、的检测信号经过处理得到控制信号,通过运动控制卡及端子板输出到压电放大电路,通过压电驱动器控制每一根柔性悬臂梁的振动。
5.根据权利要求1所述的振动测控装置,其特征在于,所述dna状柔性圆环具体是外圈为螺旋线形状,螺距120mm,所述螺旋线的圈数为3圈,起始角度为270度。
6.根据权利要求4所述的振动测控装置,其特征在于,所述压电传感器安装在上层柔性悬臂梁及下层柔性悬臂梁的宽度方向中心线,双面粘贴,每一个柔性悬臂梁各粘贴两片。
7.根据权利要求4所述的振动测控装置,其特征在于,所述压电驱动器安装在四根柔性悬臂梁宽度方向中心线,且双面粘贴,每一根柔性悬臂梁各粘贴两片。
8.根据权利要求1所述的振动测控装置,其特征在于,还包括阶梯轴和弹性挡圈用于对中层结构和上层结构的轴向限位。
9.根据权利要求1-7任一项所述的振动测控装置,其特征在于,所述柔性结构通过竖直方杆与试验台连接。
10.一种基于权利要求1-9任一项所述的振动测控装置的方法,其特征在于,包括:
技术总结
本发明公开了一种三层柔性关节多柔体耦合结构的振动测控装置及方法,包括:柔性结构,包括间隔距离设置的三层结构及中间轴,所述下层结构的外圈与中层结构的外圈通过刚性杆连接,所述中层结构的内圈与上层结构的内圈连接,三层结构均与中间轴连接,中间轴通过减速机与电机连接,电机驱动柔性结构运动;振动检测部分,用于检测柔性结构中上层柔性悬臂梁及下层柔性悬臂梁的振动信号;驱动控制部分,根据检测的振动信号控制上层及下层柔性悬臂梁的振动。本发明基于振动测控装置上圆盘的旋转运动,对柔性多体耦合结构的振动特性和动态行为进行准确的分析。
技术研发人员:邱志成,衣佳泽
受保护的技术使用者:华南理工大学
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!