一种固态激光雷达和车辆的制作方法
本申请总地涉及光学,更具体地涉及一种固态激光雷达和车辆。
背景技术:
1、目前,自动驾驶和半自动驾驶正处于发展的风口浪尖,依据现如今算力和通信速度的长足发展,使这种需求处于一种蓄势待发的状态。但是如果是采用双目或者更多目图片获取的方式,算力还是不足的,在此之前,需要有一个硬件作为辅助,成为自动驾驶的眼睛。而激光雷达作为现今的最通用的自动驾驶的传感装置,是一个良好的选择。
2、但是,目前机械式的激光雷达,存在可靠性问题和成本过高的问题。半固态激光雷达,存在一个fov过小的问题,而如果要增大半固体激光雷达的fov则需要增加模组的数量,成本较高。纯固态激光雷达中相控阵激光雷达在稳定性和寿命上达到了一个很高的水平,但是由于相控阵是一个不太成熟的产品,相控阵单元较大,无法完成大角度的衍射,加入了另一个衍射器件后容易出现旁瓣等问题,对信噪比又影响,同时受制于硬件的刷新率,复用能力不强。
3、而纯固态的点云激光雷达具有很强的集成性和可靠性,但是激光点阵过多则易出现散热问题、能耗问题和成本高的问题,激光点阵过少则可能导致探测距离不足,其目前多作为辅助雷达使用。
4、因此,有必要对固态激光雷达和车辆进行改进,以解决至少一个技术问题。
技术实现思路
1、为了解决上述问题中的至少一个而提出了本申请。具体地,本申请第一方面提供一种固态激光雷达,包括:
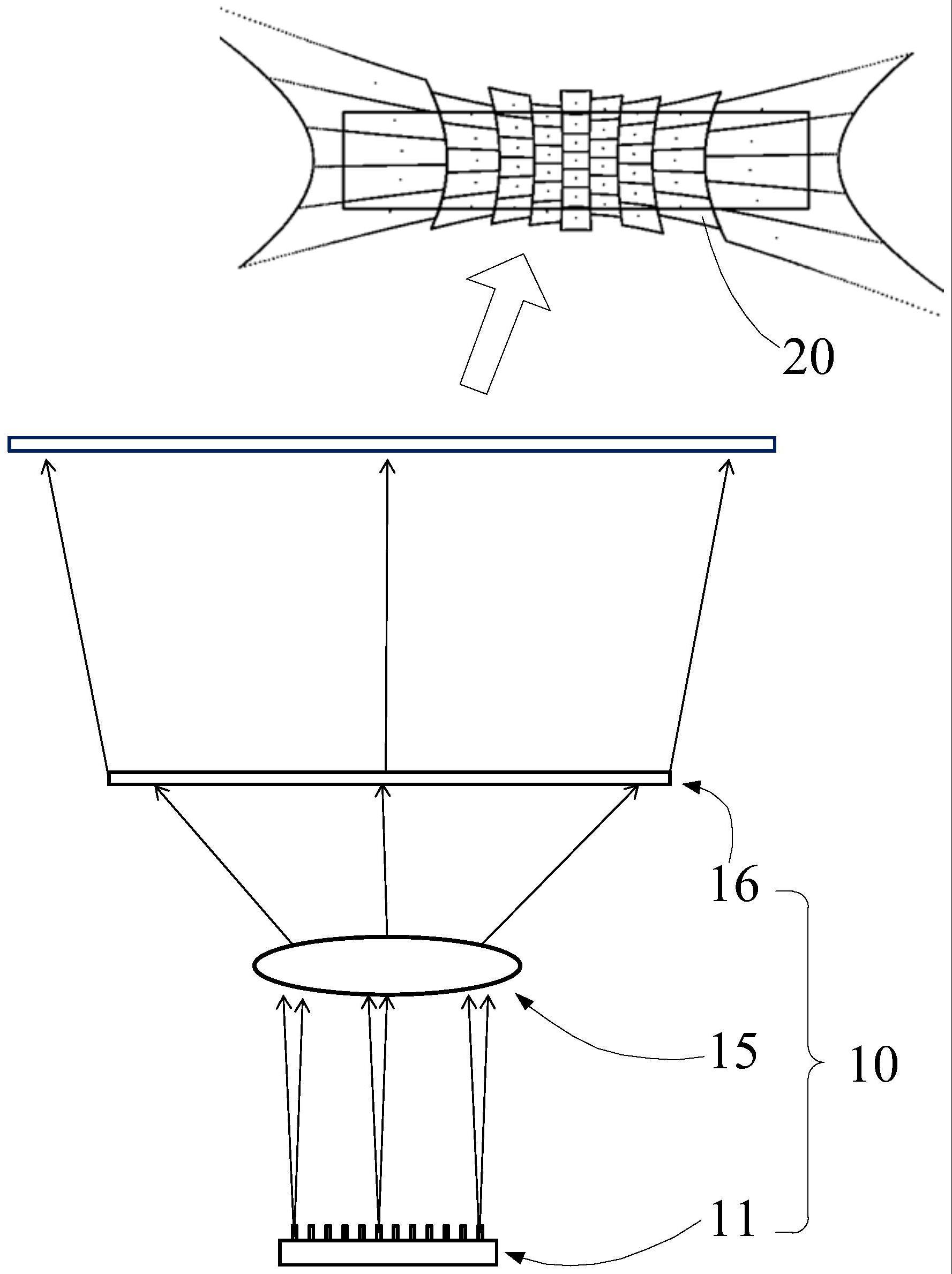
2、接收器,所述接收器具有沿第一方向排列的j个接收行,每个所述接收行具有沿第二方向排布的k个接收单元,以使得j×k个所述接收单元形成接收阵列,其中所述第一方向和所述第二方向正交;
3、发射器,所述发射器包括:
4、光源,所述光源包括沿所述第一方向排布的m个发射行,每个所述发射行具有沿所述第二方向排布的n个发射单元,以使得m×n个所述发射单元形成发射阵列,
5、准直透镜,用于准直所述光源发射出的光线,
6、衍射光学元件,用于将一束光线分成s×t束分光,其中t束所述分光沿所述第二方向排布形成分光行,s个所述分光行沿所述第一方向排布;
7、其中,所述发射器发射出的光线阵列具有沿所述第一方向的第一视场角α和沿所述第二方向的第二视场角β,所述发射器沿所述第一方向的第一最小发射角分辨率为α/(m×s),所述发射器沿所述第二方向的第二最小发射角分辨率为β/(n×t),所述接收器沿所述第一方向的第一接收角分辨率为α/j,所述接收器沿所述第二方向的第二接收角分辨率为β/k;并且
8、所述第一最小发射角分辨率α/(m×s)与所述第一接收角分辨率α/j匹配,所述第二最小发射角分辨率β/(n×t)与所述第二接收角分辨率β/k匹配。
9、根据本申请的固态激光雷达,根据接收器的固有角分辨率设置合适的发射器最小发射角分辨率,进而通过设计发射器合适的参数得到该最小发射角分辨率,能够平衡性能和硬件成本,获得较高的能效比。
10、可选地,0.5α/j≤α/(m×s)≤4α/j;
11、0.5β/k≤β/(n×t)≤4β/k。
12、可选地,α/j≤α/(m×s)≤2α/j;
13、β/k≤β/(n×t)≤2β/k。
14、可选地,所述第一最小发射角分辨率大于或等于0.05°且小于或等于0.2°;
15、所述第二最小发射角分辨率大于或等于0.05°且小于或等于0.2°。
16、可选地,所述第一最小发射角分辨率大于或等于0.1°且小于或等于0.15°;
17、所述第二最小发射角分辨率大于或等于0.1°且小于或等于0.15°。
18、可选地,所述准直透镜的焦距为f,所述准直透镜的半径为r,且满足:
19、r=(max(m,n)+2×f×tan(γ/2))×φ/2,
20、其中γ为所述发射单元的发散角,φ为补偿系数且在1.1-1.3之间取值。
21、可选地,所述准直透镜的焦径比满足:f/(2×r)大于或等于1。
22、可选地,单个所述发射单元的发散角γ为15°-35°。
23、可选地,所述光源的发光面沿所述第一方向的尺寸为a,所述发光面沿所述第二方向的尺寸为b,所述准直透镜沿所述第一方向的成像角度为η1,η1=arctan(a/2f),所述准直透镜沿所述第二方向的成像角度为η2,η2=arctan(b/2f);
24、所述衍射光学元件沿所述第一方向的光栅周期为w1,所述衍射光学元件沿所述第一方向的光栅周期为w2,所述衍射光学元件沿所述第一方向的衍射角度为θ1,所述衍射光学元件沿所述第二方向的衍射角度为θ2,所述衍射光学元件的沿所述第一方向的衍射级次为h1,所述衍射光学元件的沿所述第二方向的衍射级次为h2,所述光源能够发射出波长为λ的光线,θ1=arcsin(h1×λ/w1),θ2=arcsin(h2×λ/w2),h1取值为0.5/c1,h2取值为0.5/c2,其中c为衍射光学元件沿所述第一方向的相邻两个衍射级的区块的错位比率,且0<c1≤1,c2为所述衍射光学元件沿所述第二方向的相邻两个衍射级的区块的错位比率,且0<c2≤1;
25、其中,η1=θ1×σ1,0.95≤σ1≤1.05,且η2=θ2×σ2,0.95≤σ2≤1.05×σ2,并且/或者w1=w1’+ω1,且w2=w2’+ω2,其中w1’对应于η1=θ1且w2’对应于η2=θ2,|ω1|<0.05×w1’且|ω2|<0.05×w2’。
26、可选地,m个所述发射单元沿所述第一方向排布形成发射列,以形成m行n列的所述发射阵列。
27、可选地,m个所述发射单元沿所述第三方向排布形成发射列,且m个所述发射单元沿所述第四方向排布形成发射列,以形成m行n列的所述发射阵列,所述第三方向横向于所述第一方向且所述第三方向横向于所述第二方向,所述第四方向横向于所述第一方向且所述第四方向横向于所述第二方向。
28、可选地,所述第三方向和所述第四方相对于所述第一方向对称;并且/或者
29、所述第三方向和所述第四方向之间的夹角δ为30°-75°。
30、可选地,所述发射器的所述第一视场角α满足,20°≤α≤50°;
31、所述发射器的所述第二视场角β为60°、90°或120°。
32、可选地,所述发射器的所述第一视场角α满足,30°≤α≤40°。
33、可选地,所述光源是垂直腔面发射激光器;并且/或者
34、所述接收器是单光子雪崩二极管阵列接收器,所述接收单元是所述接收器是单光子雪崩二极管。
35、本申请的第二方面提供一种车辆,所述车辆包括上述第一方面所述的固态激光雷达。
36、本申请的车辆由于包括前述的固态激光雷达,因此具有和固态激光雷达基本相同的优点。
技术特征:
1.一种固态激光雷达,其特征在于,包括:
2.根据权利要求1所述的固态激光雷达,其特征在于,
3.根据权利要求2所述的固态激光雷达,其特征在于,
4.根据权利要求1所述的固态激光雷达,其特征在于,
5.根据权利要求4所述的固态激光雷达,其特征在于,
6.根据权利要求1所述的固态激光雷达,其特征在于,所述准直透镜的焦距为f,所述准直透镜的半径为r,且满足:
7.根据权利要求6所述的固态激光雷达,其特征在于,所述准直透镜的焦径比满足:f/(2×r)大于或等于1。
8.根据权利要求6所述的固态激光雷达,其特征在于,单个所述发射单元的发散角γ为15°-35°。
9.根据权利要求6所述的固态激光雷达,其特征在于,
10.根据权利要求1所述的固态激光雷达,其特征在于,m个所述发射单元沿所述第一方向排布形成发射列,以形成m行n列的所述发射阵列。
11.根据权利要求1所述的固态激光雷达,其特征在于,m个所述发射单元沿所述第三方向排布形成发射列,且m个所述发射单元沿所述第四方向排布形成发射列,以形成m行n列的所述发射阵列,所述第三方向横向于所述第一方向且所述第三方向横向于所述第二方向,所述第四方向横向于所述第一方向且所述第四方向横向于所述第二方向。
12.根据权利要求11所述的固态激光雷达,其特征在于,
13.根据权利要求1-12中任一项所述的固态激光雷达,其特征在于,
14.根据权利要求13所述的固态激光雷达,其特征在于,
15.根据权利要求1-12中任一项所述的固态激光雷达,其特征在于,
16.一种车辆,其特征在于,所述车辆包括根据权利要求1-15中任一项所述的固态激光雷达。
技术总结
本申请提供一种固态激光雷达和车辆。固态激光雷达包括接收器和发射器。接收器由J×K个接收单元形成接收阵列。发射器包括光源、准直透镜和衍射光学元件。光源由M×N个发射单元形成发射阵列。准直透镜用于准直光源发出的光线。衍射光学元件用于将一束光线分成S×T束分光。发射器发射出的光线阵列具有沿第一方向的第一视场角α和沿第二方向的第二视场角β,发射器沿第一方向的第一最小发射角分辨率为α/(M×S),发射器沿第二方向的第二最小发射角分辨率为β/(N×T),接收器沿第一方向的第一接收角分辨率为α/J,接收器沿第二方向的第二接收角分辨率为β/K;第一最小发射角分辨率与第一接收角分辨率匹配,第二最小发射角分辨率与第二接收角分辨率匹配。
技术研发人员:宋昱铭,隋磊,田克汉
受保护的技术使用者:嘉兴驭光光电科技有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!