GPS数据静态漂移处理方法与流程
本发明涉及数据处理,特别是涉及一种gps数据静态漂移处理方法。
背景技术:
1、gps(global positioning system,全球定位系统),我国的gps定位应用相当广泛,gps定位是将gps接收机安装于各种导航终端、位置监控终端或手机等智能终端上。
2、gps定位容易受到大气离子层变化、云层或高大建筑物遮挡等因素的影响,因而gps接收机解算的位置信息与实际位置容易出现偏差。gps接收机解算的位置信息与实际位置会出现不同程度偏差,这种偏差如果在误差允许范围内则被业界所接受,即认为是定位准确的,但超出范围则认为是定位漂移。这种定位漂移现象在被定位的终端设备处于静止时尤为明显,使得被定位的终端设备出现在监控平台地图上的位置飘忽不定、杂乱无章,弱信号情况下其位置偏差甚至会达到几百米上千米的范围,这种现象称为gps定位静态漂移。
3、目前,传统的用于改善gps定位漂移的方法大多依赖于终端设备的外部工作条件,通过终端设备内部算法进行自动改善,需要处理的数据量较大,较难保证静态漂移误差改善的准确度。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种静态漂移误差改善精度较高的gps数据静态漂移处理方法。
2、本发明提供了一种gps数据静态漂移处理方法,所述方法包括:
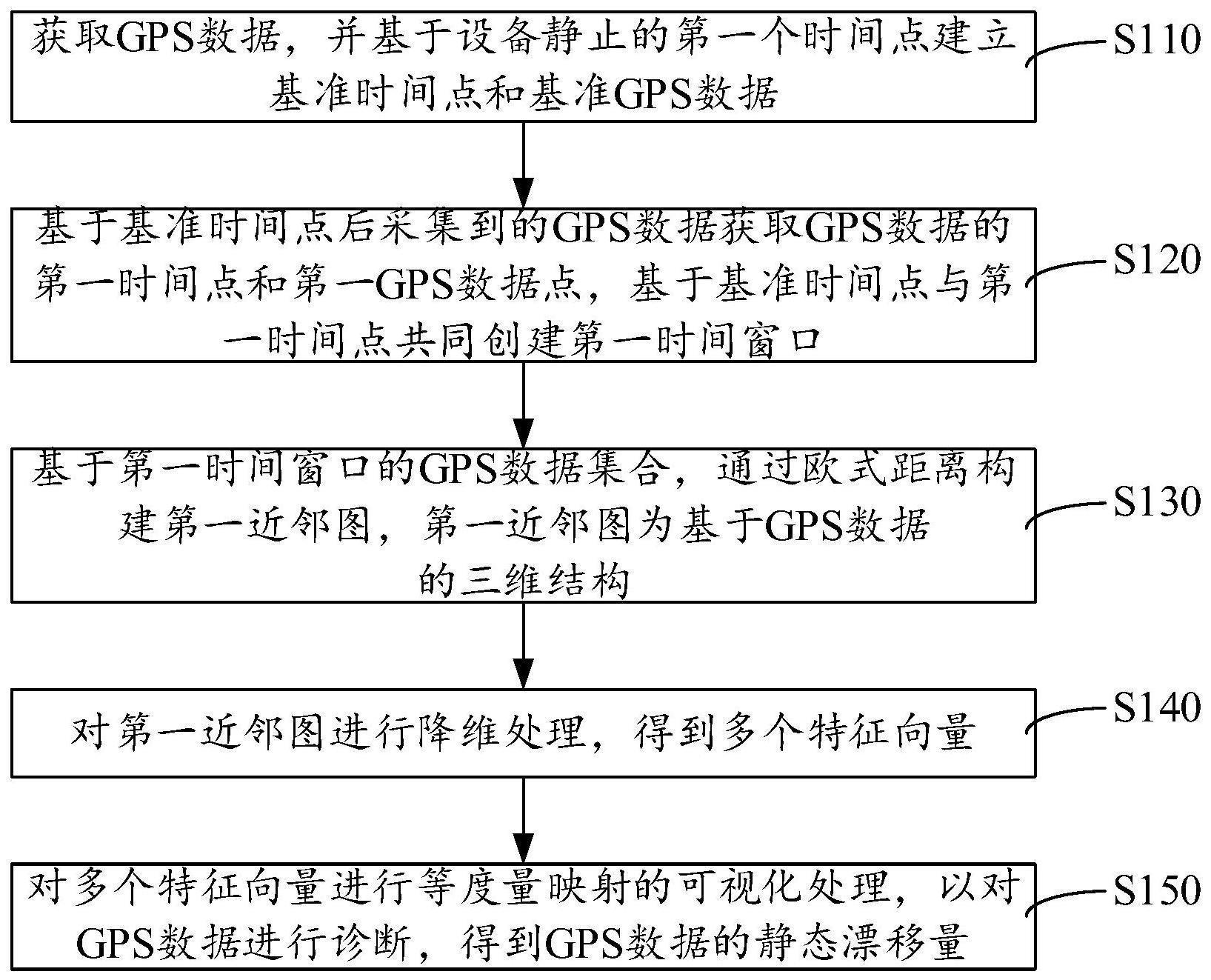
3、获取gps数据,并基于设备静止的第一个时间点建立基准时间点和基准gps数据;
4、基于基准时间点后采集到的gps数据获取所述gps数据的第一时间点和第一gps数据点,基于基准时间点与第一时间点共同创建第一时间窗口;
5、基于所述第一时间窗口的gps数据集合,通过欧式距离构建第一近邻图,所述第一近邻图为基于所述gps数据的三维结构;
6、对所述第一近邻图进行降维处理,得到多个特征向量;
7、对所述多个特征向量进行等度量映射的可视化处理,以对所述gps数据进行诊断,得到所述gps数据的静态漂移量。
8、在其中一个实施例中,所述获取gps数据,并基于设备静止的第一个时间点建立基准时间点和基准gps数据,包括:
9、收集多个所述gps数据,所述gps数据为三维空间中gps点对应的三维位置坐标;
10、基于多个所述gps数据,选择一个所述第一时间窗口,以使多个所述gps数据处于同一个时间点。
11、在其中一个实施例中,所述基于所述第一时间窗口的gps数据集合,通过欧式距离构建第一近邻图,所述第一近邻图为基于所述gps数据的三维结构,包括:
12、基于多个所述gps数据和一个所述第一时间窗口,通过欧式距离构建基于多个所述gps数据的三维结构;
13、基于所述三维结构,构建所述第一近邻图,所述第一近邻图为k近邻图。
14、在其中一个实施例中,所述基于所述第一时间窗口的gps数据集合,通过欧式距离构建第一近邻图,所述第一近邻图为基于所述gps数据的三维结构,还包括:
15、通过欧氏距离计算每个所述gps数据对应的gps点的相邻点,并基于所述相邻点构建邻近点列表;
16、基于所述邻近点列表构建邻近点图,并计算所述邻近点图的拉普拉斯矩阵及其特征值。
17、在其中一个实施例中,所述对所述第一近邻图进行降维处理,得到多个特征向量,包括:
18、基于所述特征值在所述邻近点图中的大小分布,对所述第一近邻图进行降维,得到所述第一近邻图的二维结构;
19、基于所述第一近邻图的二维结构,获取不同gps点之间的向量。
20、在其中一个实施例中,所述对所述第一近邻图进行降维处理,得到多个特征向量,还包括:
21、基于多个所述不同gps点之间的向量,通过特征值分解获取所述多个特征向量;
22、其中,所述多个特征向量由多个所述不同gps点之间的向量共同构成。
23、在其中一个实施例中,所述对所述多个特征向量进行等度量映射的可视化处理,以对所述gps数据进行诊断,得到所述gps数据的静态漂移量,包括:
24、通过在二维或三维坐标系中绘制gps点对所述多个特征向量进行等度量可视化处理,得到可视化结果;
25、其中,所述可视化结果用于确定每个所述gps数据在二维或三维空间坐标系中对应的gps点。
26、在其中一个实施例中,所述对所述多个特征向量进行等度量映射的可视化处理,以对所述gps数据进行诊断,得到所述gps数据的静态漂移量,还包括:
27、基于所述可视化结果,获取所述gps数据在所述二维或三维坐标系中对应的gps点;
28、其中,每个所述gps数据在所述二维或三维坐标系中具有唯一的所述gps点。
29、在其中一个实施例中,所述对所述多个特征向量进行等度量映射的可视化处理,以对所述gps数据进行诊断,得到所述gps数据的静态漂移量,还包括:
30、基于所述gps数据以及每个gps数据对应的gps数据点,对所述gps数据进行诊断,得到诊断结果;
31、基于所述诊断结果,获取所述gps数据的静态漂移量;
32、其中,所述静态漂移量用于反馈所述gps数据的静态漂移误差,且所述静态漂移量与所述静态漂移误差呈正相关。
33、在其中一个实施例中,所述方法还包括:
34、通过调整gps设备或对所述gps数据进行滤波,对所述静态漂移量进行处理,以减小所述静态漂移量。
35、本发明还提供了一种电子设备,包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现如上述任一种所述的gps数据静态漂移处理方法。
36、本发明还提供了一种计算机存储介质,存储有计算机程序,所述计算机程序被处理器执行时实现如上述任一种所述的gps数据静态漂移处理方法。
37、本发明还提供了一种计算机程序产品,包括计算机程序,所述计算机程序被处理器执行时实现如上述任一种所述的gps数据静态漂移处理方法。
38、上述gps数据静态漂移处理方法,通过获取gps数据,并基于gps数据获取gps数据的时间窗口。随后,基于gps数据及其时间窗口,通过欧式距离构建gps数据对应的三维结构的近邻图,并对gps数据的近邻图进行降维处理,来得到二维结构的关于gps数据的多个特征向量。最后,通过对该多个特征向量进行等度量映射的可视化处理,实现对gps数据的诊断,得到gps数据的静态偏移量。该方法通过对gps数据近邻图的构建,并对其近邻图进行降维处理,来获取gps数据的特征向量,并进一步对gps数据的特征向量进行等度量映射的可视化处理,来对gps数据进行较为精准的诊断,因此该方法得到的gps数据的静态漂移量较为准确,因此能够根据更加精准的静态漂移量对gps数据进行静态漂移改善。
技术特征:
1.一种gps数据静态漂移处理方法,其特征在于,所述方法包括:
2.根据权利要求1所述的gps数据静态漂移处理方法,其特征在于,所述获取gps数据,并基于设备静止的第一个时间点建立基准时间点和基准gps数据,包括:
3.根据权利要求2所述的gps数据静态漂移处理方法,其特征在于,所述基于所述第一时间窗口的gps数据集合,通过欧式距离构建第一近邻图,所述第一近邻图为基于所述gps数据的三维结构,包括:
4.根据权利要求3所述的gps数据静态漂移处理方法,其特征在于,所述基于所述第一时间窗口的gps数据集合,通过欧式距离构建第一近邻图,所述第一近邻图为基于所述gps数据的三维结构,还包括:
5.根据权利要求4所述的gps数据静态漂移处理方法,其特征在于,所述对所述第一近邻图进行降维处理,得到多个特征向量,包括:
6.根据权利要求5所述的gps数据静态漂移处理方法,其特征在于,所述对所述第一近邻图进行降维处理,得到多个特征向量,还包括:
7.根据权利要求1所述的gps数据静态漂移处理方法,其特征在于,所述对所述多个特征向量进行等度量映射的可视化处理,以对所述gps数据进行诊断,得到所述gps数据的静态漂移量,包括:
8.根据权利要求7所述的gps数据静态漂移处理方法,其特征在于,所述对所述多个特征向量进行等度量映射的可视化处理,以对所述gps数据进行诊断,得到所述gps数据的静态漂移量,还包括:
9.根据权利要求8所述的gps数据静态漂移处理方法,其特征在于,所述对所述多个特征向量进行等度量映射的可视化处理,以对所述gps数据进行诊断,得到所述gps数据的静态漂移量,还包括:
10.根据权利要求1至9任一项所述的gps数据静态漂移处理方法,其特征在于,所述方法还包括:
技术总结
本发明涉及一种GPS数据静态漂移处理方法,该方法包括:取设备静止的第一个GPS数据中的时间为基准时间点,持续采集GPS数据,并基于新采集的GPS数据获取该GPS数据的第一时间点,第一时间点与基准时间点构成第一时间窗口。将基于第一时间窗口的GPS数据集合,通过欧式距离构建第一近邻图,第一近邻图为基于GPS数据的三维结构。对第一近邻图进行降维处理,得到多个特征向量。对多个特征向量进行等度量映射的可视化处理,以对GPS数据进行诊断,得到GPS数据的静态漂移量。该方法通过对GPS数据近邻图的构建,并进行降维处理来获取GPS数据的特征向量,并进一步进行等度量映射的可视化处理,进行较为精准的诊断,进而能够更加精准地对GPS数据进行静态漂移改善。
技术研发人员:胡中峻
受保护的技术使用者:上学啦(深圳)科技有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!