一种复杂战场环境下的军用移动装备定位系统
本发明涉及通信及模拟训练,特别是涉及一种复杂战场环境下的军用移动装备定位系统。
背景技术:
1、随着通信技术的不断发展,部队信息化建设日趋完善,对于复杂战场环境下军用移动装备的定位精度的要求也越来越高,目前主流的导航模式主要包括卫星导航系统和惯性导航系统两种。
2、卫星导航系统具有实现全球、全天候、高精度的导航等优点;但卫星导航系统容易收到周围环境的影响,例如树木楼房等,造成多路径效应,使得定位结果精度降低甚至丢失,尤其是在隧道等室内环境中,卫星导航系统基本无法使用。另外,即使在空旷的环境下,当载体速度非常低时,卫星导航系统获得载体方位信息(航向角)也会产生较大误差。
3、惯性导航是以牛顿力学定律为基础,通过测量载体在惯性参考系的加速度,将它对时间进行积分,且把它变换到导航坐标中,就能够得到在导航坐标中的速度、偏航角和位置等信息,同时可以获得载体的载体信息。但惯性导航系统由于陀螺仪零点漂移和累积漂移严重,移动装备震动等因素,致使无法通过直接积分加速度获得高精度的方位和速度等信息,即现有的微惯性导航系统很难长时间独立工作。
4、针对当前现有系统所存在的缺点以及战场环境的复杂性,为提高军用移动装备在隧道、密林、城市复杂道路等复杂路况下的定位精度,本发明提出了一种复杂战场环境下的军用移动装备定位系统。
技术实现思路
1、本发明的目的是针对现有问题,提供了一种复杂战场环境下的军用移动装备定位系统。
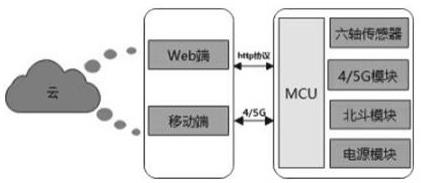
2、本发明是通过以下技术方案实现的:一种复杂战场环境下的军用移动装备定位系统,所述定位系统以mcu为核心,搭配硬件设备包括六轴传感器、4/5 g模块、北斗模块、电源模块,通过上述的模块和组件构成该系统的嵌入式前端部分,将采集到的位置信息由4/5 g网络通过mqtt协议传送到云主机,进入mysql数据库中存储;移动端和web端在需要时通过云主机的服务端口调用数据,其中移动端界面主要有装备位置获取和装备轨迹查询等功能,web端除了具备查看位置和轨迹功能外,还会对各类移动装备进行统一管理。
3、一种所述的复杂战场环境下的军用移动装备定位系统的计算方法,利用惯性导航系统和北斗导航系统优点,通过最优计算法和深度神经网络模型两种算法进行融合,构建组合定位算法以获得最优的定位结果;并且将北斗导航系统和惯性导航系统进行一体化相结合,使北斗导航系统中的接收机和惯性导航系统互相辅助工作。
4、一种所述的复杂战场环境下的军用移动装备定位系统的工作原理:通过北斗导航系统测量得到的伪距、伪距率与通过计算由惯性导航测量的位置、速度信息,所得到的伪距、伪距率做比较,将二者的差值作为测量值并通过组合定位算法处理,计算出惯性导航系统和北斗导航系统的误差量,然后对两个系统进行反馈校正;这种方式的定位精度比位置/速度组合更高;尤其是当北斗导航系统无法工作时,利用惯性导航系统使得北斗导航系统继续工作,从而保证定位系统的正常工作,提高了定位系统的稳定性和可靠性。
5、作为对上述方案的进一步改进,所述组合定位的初始化过程:惯性导航系统没有初始信息,必须通过北斗导航系统复制给惯性导航初始位置和速度方向等信息,因此需要移动装备启动以完成组合定位的初始化;
6、作为对上述方案的进一步改进,所述组合定位的误差求解:组合定位系统利用北斗导航系统和惯性导航系统得到三维位置和三维速度及偏航角,即对惯性导航的三维姿态、三维加速度和三维角速度进行求解,这些误差属于白噪声,随着时间随机变化,必须通过组合定位算法实时求解更新才可以获得最优解。
7、作为对上述方案的进一步改进,所述组合定位的训练时间:组合定位系统需要通过北斗导航系统求解惯性导航系统的各种误差,因此必须有一个训练过程,即用高质量的北斗导航系统来训练惯性导航系统的性能,使得惯性导航系统可以估计出自身误差,如果训练时间很短,则无法实现很好的性能。
8、本发明相比现有技术具有以下优点:(1)软件算法:将最优估计算法和深度神经网络模型两种算法进行融合,构建组合定位算法,从算法层面提升了定位精度;
9、(2)智能甄别:系统可自动识别并隔离有较大误差的北斗数据,最大程度减少由误差数据带来的定位误差;
10、(3)惯性里程计:利用纯惯性导航辅助实现移动装备的高精度定位;
11、(4)定位技术:通过组合定位算法提供实时高精度的装备定位信息,在北斗系统的信号精度降低甚至丢失卫星信号时,利用纯惯性导航技术,也可在较长时间内单独对移动装备载体进行高精度定位,保证移动装备的精准定位以实现对装备的实时监控。
技术特征:
1.一种复杂战场环境下的军用移动装备定位系统,包括前端部分,其特征在于,所述前端部分的系统以mcu为核心,并搭配硬件设备;所述硬件设备包括六轴传感器、4/5 g模块、北斗模块、电源模块,前部部分采集到的位置信息由4/5 g网络通过mqtt协议传送到云主机,进入mysql数据库中存储;移动端和web端在需要时通过云主机的服务端口调用数据。
2.一种如权利要求1所述的复杂战场环境下的军用移动装备定位系统的计算方法,其特征在于,利用惯性导航系统和北斗导航系统优点,通过最优计算法和深度神经网络模型两种算法进行融合,构建组合定位算法以获得最优的定位结果;并且将北斗导航系统和惯性导航系统进行一体化相结合,使北斗导航系统的接收机和惯性导航系统互相辅助工作。
3.一种如权利要求1所述的复杂战场环境下的军用移动装备定位系统的工作原理:通过北斗导航系统测量得到的伪距、伪距率与通过计算由惯性导航测量的位置、速度信息,所得到的伪距、伪距率做比较,将二者的差值作为测量值并通过组合定位算法处理,计算出惯性导航系统和北斗导航系统的误差量,然后对两个系统进行反馈校正;这种方式的定位精度比位置/速度组合更高;尤其是当本定位系统中的北斗导航系统无法工作时,利用惯性导航系统使得导航系统继续工作。
技术总结
本发明公开了一种复杂战场环境下的军用移动装备定位系统,以MCU为核心,并搭配硬件设备,所述硬件设备包括六轴传感器、4/5 G模块、北斗模块、电源模块,通过上述的模块和组件构成该系统的嵌入式前端部分,将采集到的位置信息由4/5 G网络通过MQTT协议传送到云主机,进入MySQL数据库中存储;移动端和Web端在需要时通过云主机的服务端口调用数据。具有构思创新性强,改变传统的定位追踪运行模式,通过最优计算法和深度神经网络模型融合以提高定位精度,智能判断减小定位误差,以高精度信息配合惯性导航可在丢失卫星信号时继续使用。
技术研发人员:王武科,吴学平,李宽,李岩,张森林,贺潇男,司国强,王敏
受保护的技术使用者:中国人民解放军陆军装甲兵学院
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!