基于人工智能算法的水深监测系统
本发明涉及水深监测,尤其涉及一种基于人工智能算法的水深监测系统。
背景技术:
1、在持续下雨的天气,随着降雨量的增加,一些行车路面常常因不平整而容易产生积水区域,如果车辆进入水深超过车身的积水中,很可能会对发动机、电气系统和制动系统等关键部件造成损坏,甚至导致车辆熄火或无法行驶。
2、在经过积水路面时,车主一般是通过肉眼来目测前方水域的水深,这样较难准确了解路面积水的真实深度,贸然前进存在很大的安全风险,鉴于此,有必要研发一种能够准确监测积水深度的水深监测系统,以解决上述问题。
技术实现思路
1、本发明为了克服车主在经过积水路段时,仅通过肉眼来目测前方水域的水深,难以准确了解路面积水的真实深度的缺点,提供一种能够准确监测积水深度的基于人工智能算法的水深监测系统。
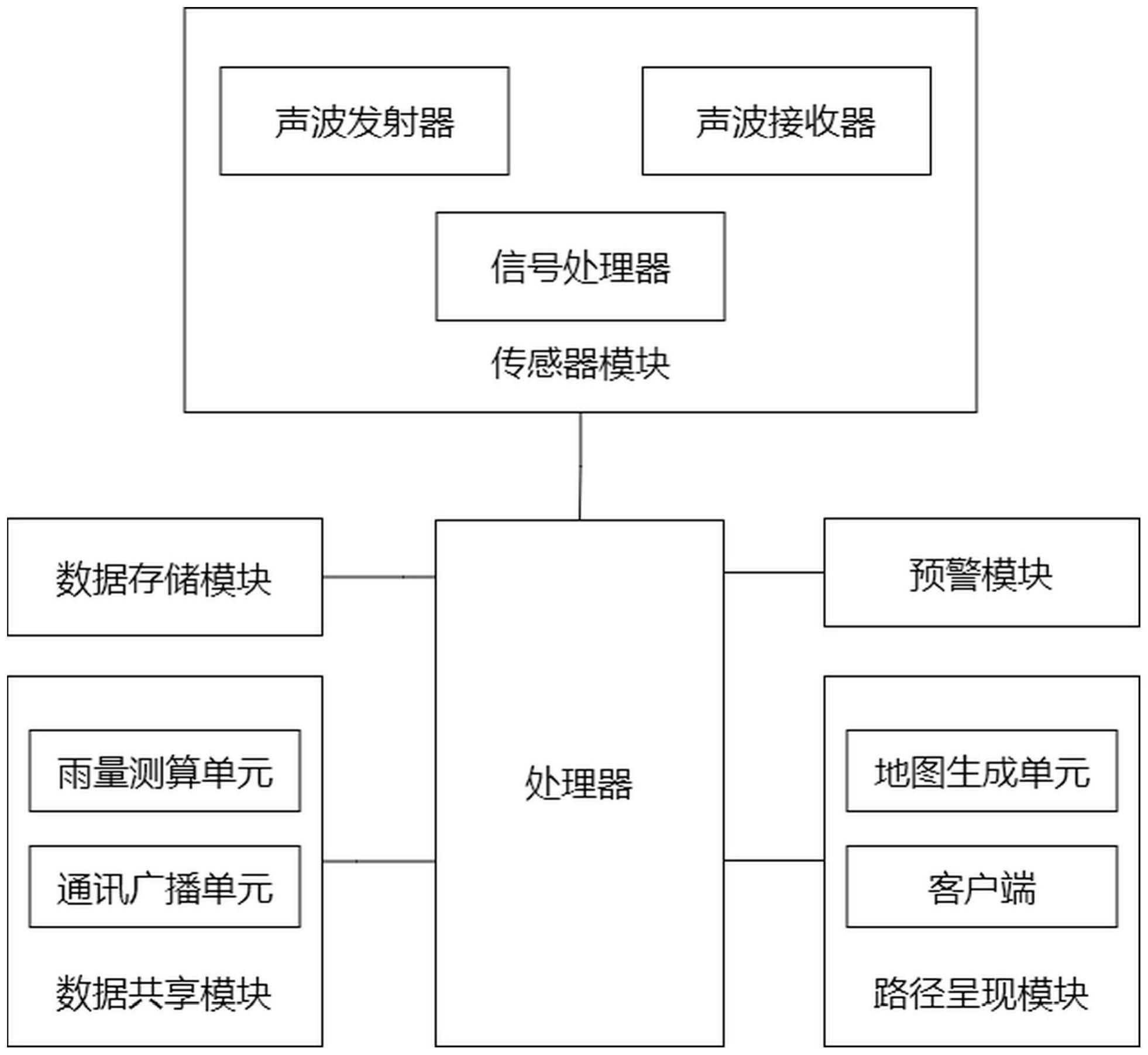
2、一种基于人工智能算法的水深监测系统,包括以下安装于车上的各功能模块:
3、传感器模块,所述传感器模块为侧扫声纳系统,用于实现声波的发射、接收和声波信号预处理;
4、处理器,用于对预处理后的声波数据进行处理和分析,并测算水深数据;
5、数据存储模块,用于记录和存储测算的水深数据,以便后续分析和使用;
6、预警模块,用于在水深超过设定的阈值时发出警报或提醒;
7、路径呈现模块,用于在水域中存在可通行路径时,指引车主向浅水的路面行驶;
8、数据共享模块,用于共享当前位置的水深状况,引导后续车辆安全通行。
9、进一步地,所述侧扫式声纳系统分为声波发射器、声波接收器和信号处理器,声波发射器和声波接收器分别安装在车身至少一个侧面,默认为车身前脸左右两端。
10、进一步地,所述侧扫式声纳系统的声波发射器按自下往上的顺序向待测范围内发射声波脉冲,并通过对应侧的声波接收器接受反射信号,再由信号处理器预处理声波的传播数据。
11、进一步地,所述路径呈现模块包括地图生成单元和客户端,所述地图生成单元用于将水深数据转换成水深地图,所述客户端则用于呈现水深地图,所述指引车主向水浅的路面行驶的方法为:提取扫描水域内的所有水深值数据,判断是否存在水深值在预设值以下的测量点,若存在,则将车辆前进方向水域中所有水深值在预设值以下的测量点,在车主客户端显示屏幕上以地图形式呈现,为车主提供开车指引和参考。
12、进一步地,所述数据共享模块包括雨量测算单元和通讯广播单元,所述雨量测算单元用于根据当前降雨量测算到达预设风险水深的降雨时间,所述通讯广播单元用于向预设区域内的车主发送水深预警和提醒信息,具体地,通过雨量测算单元检测雨量值,并根据雨量计算当前车主所在位置的水深到达预设风险水深的时间t,在时间t内通过通讯广播单元持续向预设区域内的车辆发送水深预警和提醒信息。
13、进一步地,所述数据共享模块链接至客户端,所述客户端为车主手机、车内中控屏或其他监视器,通过客户注册水深监测系统时的手机号接收预警和提醒信息,所述预警和提醒信息通过接入的网络运营服务商进行推送。
14、进一步地,所述水深监测系统包括以下监测步骤:
15、s1、在车辆的底部或底盘上安装侧扫式声纳系统,确保传感器的扫描范围最大;
16、s2、通过侧扫式声纳系统向扫描范围内的水域发射声波,并接收回波,将回波信号发送至信号处理器进行预处理;
17、s3、通过处理器将预处理后的回波数据进行处理,提取水深数据;所述水深数据基于声波的传播速度、回波强度和回波时间各参数来测算,同时,通过数据存储模块记录和存储测算的水深数据,以便后续分析和使用;
18、s4、根据需要设置水深的阈值,当水深超过设定的阈值时,由车辆的预警模块发出警报或提醒信息;
19、s5、根据测得的水域中的水深数据,指引车主向浅水的路面行驶;
20、s6、共享当前区域的水深状况,引导后续车辆安全通行。
21、进一步地,所述步骤s2侧扫声纳系统的具体工作步骤如下:
22、s2.1、通过声波发射器以高频率向待测水域发射具有特定方向的一系列声波脉冲;
23、s2.2、通过声波接收器捕捉发射出的声波脉冲在与路面目标物体接触后反射回来的反射信号,并将其转化为电信号;
24、s2.3、通过信号处理器将接收到的电信号进行放大、滤波和频谱分析处理,以提取声波的传播速度、回波强度和回波时间各参数信息,并将其传送至处理器。
25、本发明的有益效果是:
26、本发明通过侧扫式声纳系统对车辆前方的积水区域进行水深测量,能够更加准确地测量积水的深度,同时,通过将水深数据转换成可视化的水深地图,能够方便车主更好地选择行车路径和方向,有效避免车辆驶入深水区域造成发动机进水或车辆陷落导致抛锚的风险,通过数据共享模块,能够及时将当前位置的水深数据共享给其他车主,引导其他车主安全通行。
技术特征:
1.一种基于人工智能算法的水深监测系统,其特征在于,包括以下安装于车上的各功能模块:
2.根据权利要求1所述的一种基于人工智能算法的水深监测系统,其特征在于,所述侧扫式声纳系统分为声波发射器、声波接收器和信号处理器,声波发射器和声波接收器分别安装在车身至少一个侧面,默认为车身前脸左右两端。
3.根据权利要求2所述的一种基于人工智能算法的水深监测系统,其特征在于,所述侧扫式声纳系统的声波发射器按自下往上的顺序向待测范围内发射声波脉冲,并通过对应侧的声波接收器接受反射信号,再由信号处理器预处理声波的传播数据。
4.根据权利要求1所述的一种基于人工智能算法的水深监测系统,其特征在于,所述路径呈现模块包括地图生成单元和客户端,所述地图生成单元用于将水深数据转换成水深地图,所述客户端则用于呈现水深地图,所述指引车主向水浅的路面行驶的方法为:提取扫描水域内的所有水深值数据,判断是否存在水深值在预设值以下的测量点,若存在,则将车辆前进方向水域中所有水深值在预设值以下的测量点,在车主客户端显示屏幕上以地图形式呈现,为车主提供开车指引和参考。
5.根据权利要求1所述的一种基于人工智能算法的水深监测系统,其特征在于,所述数据共享模块包括雨量测算单元和通讯广播单元,所述雨量测算单元用于根据当前降雨量测算到达预设风险水深的降雨时间,所述通讯广播单元用于向预设区域内的车主发送水深预警和提醒信息,具体地,通过雨量测算单元检测雨量值,并根据雨量计算当前车主所在位置的水深到达预设风险水深的时间t,在时间t内通过通讯广播单元持续向预设区域内的车辆发送水深预警和提醒信息。
6.根据权利要求1所述的一种基于人工智能算法的水深监测系统,其特征在于,所述数据共享模块链接至客户端,所述客户端为车主手机、车内中控屏或其他监视器,通过客户注册水深监测系统时的手机号接收预警和提醒信息,所述预警和提醒信息通过接入的网络运营服务商进行推送。
7.根据权利要求1所述的一种基于人工智能算法的水深监测系统,其特征在于,所述水深监测系统包括以下监测步骤:
8.根据权利要求7所述的一种基于人工智能算法的水深监测系统,其特征在于,所述步骤s2侧扫声纳系统的具体工作步骤如下:
技术总结
本发明涉及水深监测技术领域,提供一种基于人工智能算法的水深监测系统,包括以下安装于车上的各功能模块:传感器模块,用于实现声波的发射、接收和声波信号预处理;处理器,用于根据接收到的回波数据提取水深数据;数据存储模块,用于记录和存储测算的水深数据;预警模块,用于在水深超过设定的阈值时发出警报或提醒;路径呈现模块,用于指引车主向浅水的路面行驶;数据共享模块,用于共享当前位置的水深状况。本发明通过侧扫式声纳系统对车辆前方的积水区域进行水深测量,能够更加准确地测量积水的深度,通过将水深数据转换成可视化的水深地图,能够有效避免车辆驶入深水区域造成发动机进水或车辆陷落导致抛锚的风险。
技术研发人员:王志
受保护的技术使用者:浙江金融职业学院
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!