一种面向水下航位推算导航的单步定位误差修正方法
本发明涉及水下导航,特别是指一种面向水下航位推算导航的单步定位误差修正方法,适用于水下航位推算导航系统的定位误差修正。
背景技术:
1、现阶段,水下机器人得到快速发展和广泛应用,其对高精度水下导航技术的需求愈发迫切。导航系统可以为水下机器人提供实时的位置、速度、姿态等参数,是水下机器人顺利完成任务的前提和保障。目前,水下机器人一般采用惯性基组合导航技术。在各种惯性基组合导航系统中,惯性导航系统(inertial navigation system,ins)/多普勒计程仪(doppler velocity log,dvl)组合导航无需先验地图和外部导航基站,具有隐蔽性和完全自主性,在水下机器人上得到广泛应用。受体积和成本所限,中小型水下机器人难以装备导航级的ins,它们搭载低成本的惯性量测单元(inertial measurement unit,imu)进行dvl自主导航。然而,ins/dvl组合导航和dvl自主导航均通过航位推算更新位置参数,定位误差随航程增加而积累,长距离航行后定位误差较大。因此,研究面向航位推算导航的误差修正方法具有重要意义。
2、在航位推算过程中,imu/ins姿态误差和dvl速度误差交叉耦合积分产生定位误差。现有误差修正方法建立imu/ins和dvl误差模型,基于误差模型进行预标定或在线修正,通过减少航位推算中传感器误差耦合项提高定位精度。但是,在复杂水下环境中imu/ins和dvl误差具有多样性、不确定性和时变性,难以精确建模,无法通过预标定和在线修正完全修正。在无外参考位置信息的条件下,目前缺少直接针对航位推算导航定位误差的末端修正方法,分析原因如下:航位推算导航定位误差受多种传感器误差影响,在不同航行轨迹下各种传感器误差对定位误差的影响方式和程度不断变化,导致定位误差具有非线性、特征多、建模难的特点,给误差修正带来困难。
技术实现思路
1、针对上述背景技术中存在的不足,本发明提出了一种面向水下航位推算导航的单步定位误差修正方法,利用径向基(radial basis function,rbf)神经网络逼近航位推算导航单步输入和单步定位误差之间的非线性函数,构造单步定位误差预测器与航位推算导航并行工作,进而在实时导航中预测单步定位误差对航位推算位置进行末端修正。本发明能够显著提高水下航位推算导航的定位精度。
2、本发明的技术方案是这样实现的:
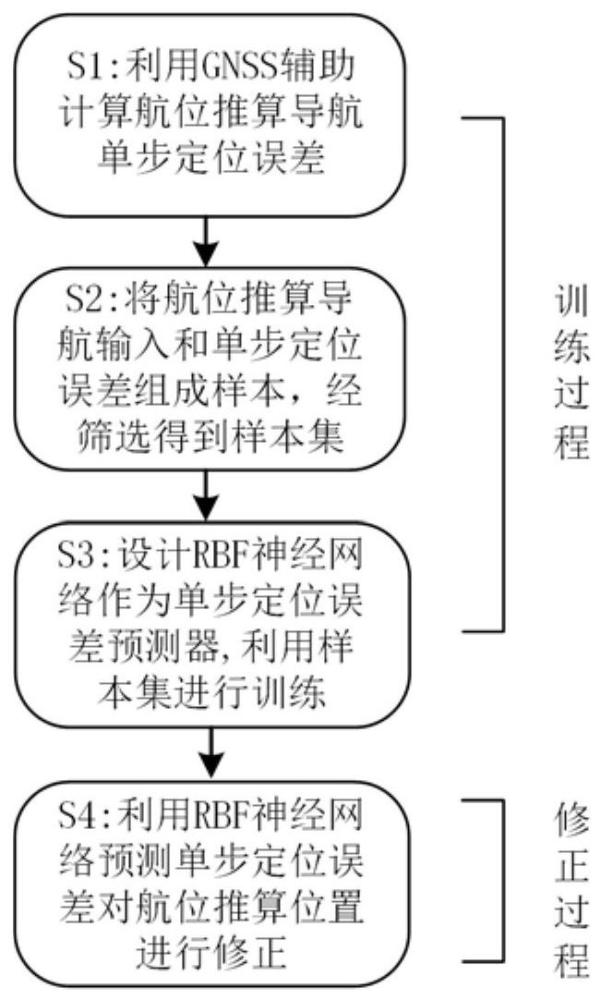
3、一种面向水下航位推算导航的单步定位误差修正方法,其步骤如下:
4、s1:利用gnss量测的位置辅助计算航位推算导航单步定位误差;
5、s2:将航位推算导航的单步输入和单步定位误差组成一个样本,并对所述样本进行筛选,得到有效样本组成训练样本集;
6、s3:设计rbf神经网络作为航位推算导航单步定位误差预测器,利用训练样本集对rbf神经网络进行训练,使其逼近航位推算导航单步输入和单步定位误差之间的非线性误差函数;
7、s4:在航位推算导航中,经过训练的rbf神经网络用作单步定位误差预测器;单步定位误差预测器与航位推算导航并行工作,预测单步定位误差对航位推算位置进行修正。
8、优选地,所述航位推算导航单步定位误差的计算方法为:
9、水下机器人在水面同步采样dvl量测的速度、imu/ins量测的姿态以及gnss量测的位置;
10、dvl量测的速度vd为:
11、vd=f(vb);
12、式中,vb为水下机器人载体坐标系内的速度,f(vb)为vb的非线性误差函数;
13、imu/ins量测的姿态atti为:
14、atti=g(att);
15、式中,att为水下机器人的姿态,g(att)为att的非线性误差函数;
16、利用vd和atti进行航位推算,得到单个推算周期内水下机器人的位移为:
17、
18、式中,tk为第k个航位推算时刻,tk+1为第k+1个航位推算时刻;为k时刻dvl量测的速度;为求得的变换矩阵,为k时刻imu/ins量测的姿态;
19、同时,利用gnss量测的位置计算tk到tk+1内水下机器人的位移dskgnss为
20、
21、式中,为k时刻gnss量测的位置,为k+1时刻gnss量测的位置;
22、计算和的差值,得到航位推算导航单步定位误差δsk为:
23、
24、式中,δse为δsk的东向误差分量,δsn为δsk的北向误差分量;为的东向分量,为的北向分量;为的东向分量,为的北向分量。
25、优选地,所述训练样本集的获得方式为:
26、将k时刻航位推算导航的单步输入与单步定位误差δsk组成样本,有:
27、
28、式中,[·]t表示矩阵的转置;
29、利用筛选有效样本,其中,dth为筛选阈值;
30、通过筛选的样本组成训练样本集:
31、
32、式中,p为样本数量。
33、优选地,所述rbf神经网络的结构为:输入与航位推算导航的输入相同,输出为航位推算导航单步定位误差,即:
34、
35、利用训练样本集对rbf神经网络进行训练,使其逼近和δsk之间的非线性误差函数;训练完成后,rbf神经网络可以用作单步定位误差预测器。
36、优选地,所述单步定位误差预测器与航位推算导航并行工作,预测单步定位误差对航位推算位置进行修正的方法为:
37、在实时的航位推算导航中,将输入rbf神经网络,得到单步定位误差预测值:
38、
39、式中,为k时刻rbf神经网络预测的单步定位误差,为的东向误差分量,为的北向误差分量;
40、利用单步定位误差预测值修正航位推算单步位移,有:
41、
42、式中,为修正后的航位推算单步位移;进一步,利用代替进行航位推算导航。
43、与现有技术相比,本发明产生的有益效果为:
44、1)本发明基于rbf神经网络构造单步定位误差预测器与航位推算导航并行工作,实现航位推算导航定位误差的末端修正,为航位推算导航提供一种系统级末端误差修正方法。
45、2)本发明无需对航位推算导航定位误差进行建模,设计rbf神经网络逼近航位推算导航单步输入和单步定位误差之间的非线性函数,实现航位推算导航定位误差的无模型修正。
46、3)本发明利用rbf神经网络优越的非线性逼近能力解决导航技术领域难题,克服航位推算导航定位误差非线性、特征多、建模难的问题,实现人工智能算法在导航技术领域的一种有效应用。
技术特征:
1.一种面向水下航位推算导航的单步定位误差修正方法,其特征在于,其步骤如下:
2.根据权利要求1所述的面向水下航位推算导航的单步定位误差修正方法,其特征在于,所述航位推算导航单步定位误差的计算方法为:
3.根据权利要求2所述的面向水下航位推算导航的单步定位误差修正方法,其特征在于,所述训练样本集的获得方式为:
4.根据权利要求3所述的面向水下航位推算导航的单步定位误差修正方法,其特征在于,所述rbf神经网络的结构为:输入与航位推算导航的输入相同,输出为航位推算导航单步定位误差,即:
5.根据权利要求4所述的面向水下航位推算导航的单步定位误差修正方法,其特征在于,所述单步定位误差预测器与航位推算导航并行工作,预测单步定位误差对航位推算位置进行修正的方法为:
技术总结
本发明提出了一种面向水下航位推算导航的单步定位误差修正方法,其步骤为:首先,利用GNSS量测的位置辅助计算航位推算导航单步定位误差;其次,将航位推算导航的单步输入和单步定位误差组成一个样本,并对所述样本进行筛选,得到有效样本组成训练样本集;然后,设计RBF神经网络作为航位推算导航单步定位误差预测器,利用训练样本集对RBF神经网络进行训练,使其逼近航位推算导航单步输入和单步定位误差之间的非线性误差函数;最后,在航位推算导航中,经过训练的RBF神经网络用作单步定位误差预测器;单步定位误差预测器与航位推算导航并行工作,预测单步定位误差对航位推算位置进行修正。本发明能够显著提高水下航位推算导航的定位精度。
技术研发人员:刘沛佳,朱政宇,李鑫泽,王博,侯冬冬,王凯,李广华
受保护的技术使用者:郑州大学
技术研发日:
技术公布日:2024/2/19
- 还没有人留言评论。精彩留言会获得点赞!